




 广告
广告





















































特斯拉全自动驾驶(FSD)工作原理1️⃣

得益于特斯拉公布的一项专利,我们得以深入窥见FSD系统的运作机制及其技术架构。专利分析机构SETI Park在X平台上重点解读了这项专利,详尽揭示了FSD数据处理与分析的核心技术框架。
为便于理解,我们将分章节解析FSD系统各模块的功能实现:
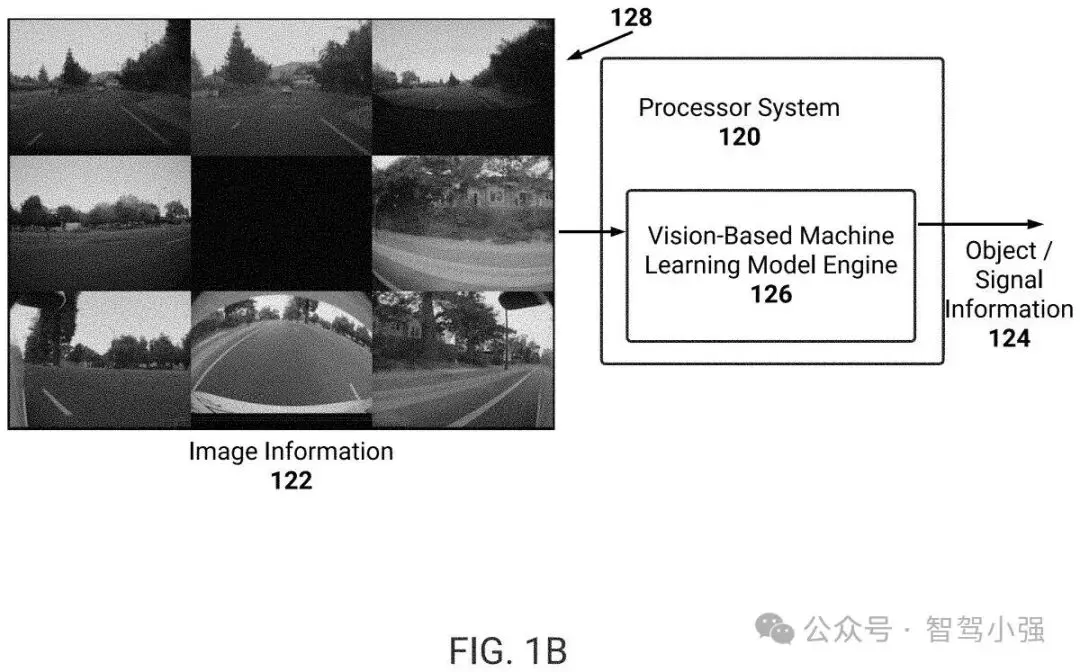
纯视觉感知体系
专利确认该系统采用纯视觉方案——与特斯拉技术路线一致——通过多摄像头阵列构建360度环视视野,某些摄像头甚至具备重叠视域。
这套系统能快速适配不同焦段与视角的摄像头,将异构视觉数据融合为连贯的环境感知图谱,其性能甚至超越人类视觉系统。
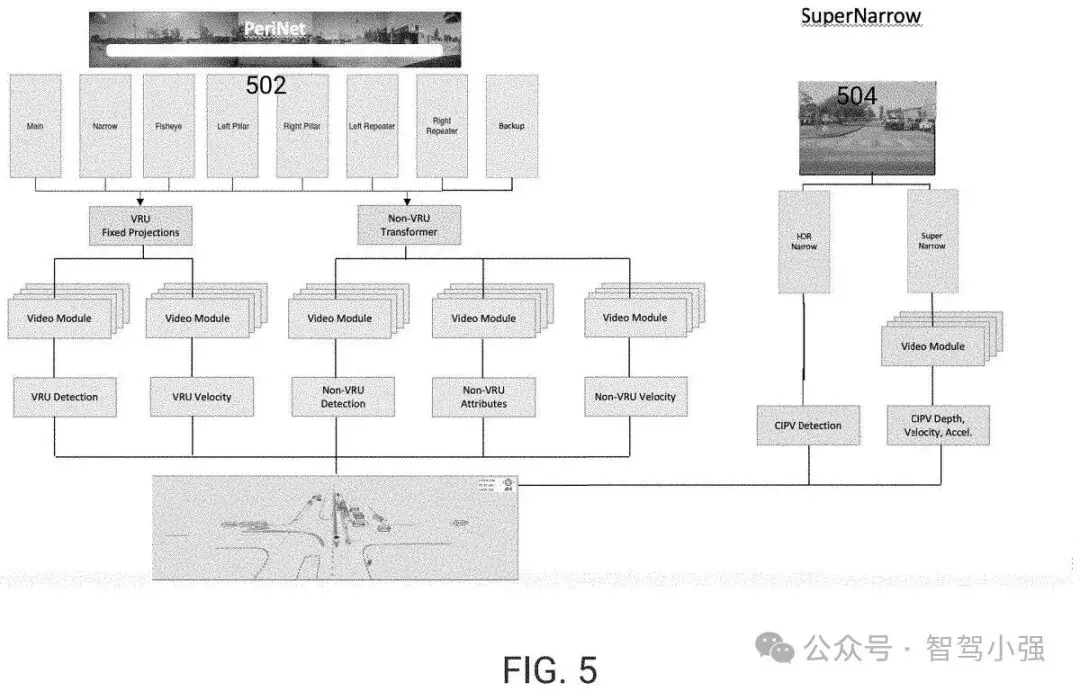
双通道处理架构
系统采用二分处理逻辑:弱势道路使用者(VRU)通道与非VRU通道。
VRU涵盖行人、骑行者、童车、滑板使用者、动物等易受伤害对象。非VRU通道则处理车辆、应急车辆、交通锥、障碍物等其他要素。
这种架构使FSD能对不同对象进行分级处理,在整个虚拟相机系统中优先保障VRU的安全。
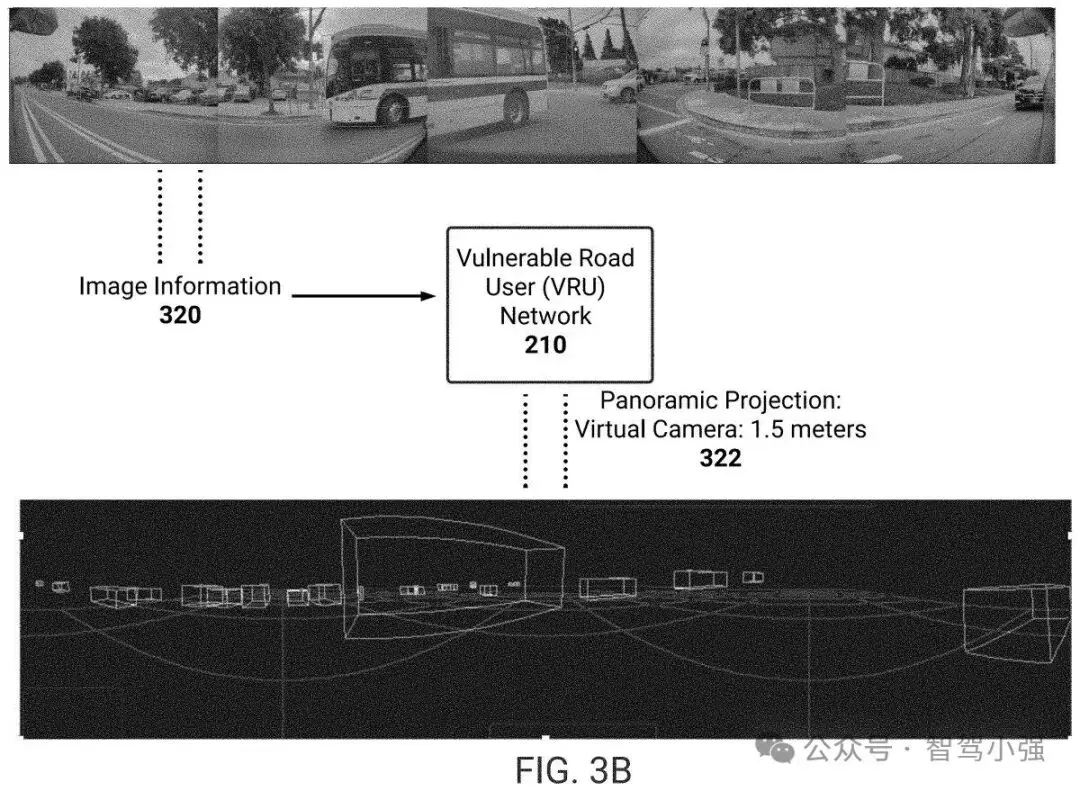
虚拟相机技术
原始图像数据经VRU与非VRU通道筛选后,系统提取关键信息进行物体识别与分类。
随后在3D平面重构物体模型,并通过多高度“虚拟相机”视角进行环境解析(类似电影拍摄中的机位概念)。可以通过不同视角(机位)看到不同的视野。
VRU通道采用其位于人体高度的虚拟摄像头,这可以更精准地理解VRU的行为模式,在人类高度的数据比从上方或任何其他角度的数据多得多。非VRU通道则采用俯视视角,以便获取更广阔的交通视野。
这有效地为FSD提供了两种形式的输入进行分析:一种是在行人层面,另一种是从周围道路的更广阔视野。
3D 环境建模
双虚拟相机系统实时同步数据,融合车辆速度与加速度等传感器信息,构建动态更新的车辆周边3D环境地图。
我们在屏幕上看到的FSD可视化界面仅显示其追踪信息的冰山一角——每个对象都携带未显示的属性数据集(如行人距离、移动方向与速度,车辆的尺寸、类型、速度、方向、预测轨迹等),这些数据与 AI 及地图信息共同构成完整的环境认知。
时间索引机制
该系统通过“视频模块”实现时序分析,持续追踪物体运动轨迹并预测未来路径。所有事物的感知都不是单一照片,而是一些列图像序列,这能让FSD了解目标物是如何移动的。
即使目标暂时脱离视野,FSD仍能推断其位置。
典型例证是FSD在拥堵路段能同时追踪多条车道车辆,包括视野盲区内的对象。
端到端训练体系
专利强调系统采用端到端联合训练模式,通过让各组件学习协同工作方式优化整体性能。这种全栈AI训练方法确保系统从感知到决策的完整链路一致性。
核心价值总结
特斯拉将FSD系统视为具有“眼睛”(摄像头)和“大脑”(处理系统)的智能体。
它不仅能记忆和分类感知数据,还能通过多维度属性追踪实现精准的运动预测与路径规划,这很像人类的操作方式。相比人类驾驶者,FSD具备全向感知、多目标精确追踪(速度/尺寸等参数量化)、毫秒级响应等优势。
FSD及其子系统基于视觉摄像头系统,本质上创建了一个不断更新的道路3D实时地图,并用于做出决策。



 广告
广告 



最新资讯
-
直播|经纬恒润:车载光通信的开发与测试
2026-01-22 18:49
-
车载光通信走向实车验证
2026-01-22 18:48
-
解析GB/T 47001-2025智能网联汽车数字身份
2026-01-22 14:48
-
解析 GB 39901-2025:轻型汽车自动紧急制动
2026-01-22 14:47
-
基于GB 24407-2025的专用校车安全技术深度
2026-01-22 14:47
