




 广告
广告





















































E-NCAP对事故信息附加数据的要求

1. 总则
2. 规范性引用文件
3. 术语与定义
4. 符号与缩写
5. 符合性
6. 要求7. 触发事故信息元素
1. 总则
本文件由 Euro NCAP 定义了一种可作为 “可选附加数据” 部分嵌入 eCall MSD(最小数据集)的数据概念,依据 EN 15722 标准,在发生碰撞或紧急情况时通过 eCall 通信会话从车辆传输至 PSAP(公共安全应答点)。
R144要求的最小数据集MSD如下:

本文件的目的在于向 PSAP 提供有关触发事故的细节信息,使PSAP或其他紧急服务机构能够更准确地评估事故严重性,从而提高应急响应效率。
本文件可视为 CEN 标准 EN 15722 的补充附录,尽量避免重复内容。
1:本文件并非 CEN 标准,但为便于阅读与实施,采用了类似标准的结构。2:本文定义的附加数据概念将在存在相关数据注册机制时提交注册。
2. 规范性引用文件
以下文件在本文中被引用,其部分内容或全部内容构成本文件的要求:
CEN EN 15722 eCall 最小数据集(MSD)
ISO/IEC ISO 8825-2 ASN.1 编码规则:非对齐压缩编码规则(PER)
ISO/IEC ISO 4130 道路车辆 三维参考系统与基准点 定义ISO/IEC ISO 12353 道路车辆 交通事故分析 第1部分:词汇
3. 术语与定义
坐标系coordinate system:用于确定空间中某点位置的参考线集合。
Δv(delta-v):触发事故开始时(t0)与之后250ms(t1)之间的速度差(Δv = v_t1 - v_t0)
eCall(紧急呼叫):通过车载传感器自动或人工触发的紧急呼叫,向最合适的 PSAP 发送事故通知和位置信息,并建立语音通道(参考 EN 15722)
车辆坐标系vehicle coordinate system:以车辆为参考的右手坐标系,用于定义车辆上点的位置(参见 ISO 4130)
4. 符号与缩写
ASN.1 抽象语法标记法(Abstract Syntax Notation One)
Δv 速度变化量
M 必选(Mandatory)
MSD 最小数据集(Minimum Set of Data)
O 可选(Optional)
OID 对象标识符(Object Identifier)
PSAP 公共安全应答点(Public Safety Answering Point)
UPER 非对齐压缩编码规则(Unaligned Packed Encoding Rules)
5. 符合性
本附加数据标准不改变 eCall 设备需满足的通用符合性要求。基于本文件的 MSD 数据内容的正确性与可靠性需通过书面文档予以证明。
6. 要求
6.1 总则
本文件描述了 CEN 标准 EN 15722 的扩展,用于对 MSD 消息进行编码。除本文件要求外,EN 15722 的所有要求同样适用。
6.2 概念与格式
6.2.1 MSD 数据概念EN 15722 定义的 MSD 包含一个可选的“附加数据块”,可用于添加与紧急救援相关的信息。
数据使用需符合欧盟《通用数据保护条例》(GDPR,EU 2016/679)。
6.2.2 MSD 数据表示
MSD 使用 ASN.1 语法,采用 UPER 编码(参见 ISO/IEC 8825-2)。
EN 15722 提供了通用 ASN.1 编码结构与发送顺序,本文件的附加数据概念遵循该结构。
6.2.3 Euro NCAP 事故附加数据概念MSD 包含两个数据元素:对象标识符(OID) 与 对象数据(Object Data)。附加数据的总长度(编码后)不得超过 140 字节。
6.2.3.1 对象数据(Object Data)
Euro NCAP 定义了一种数据概念,用于在 MSD 中嵌入触发事故的传感器信息,帮助 PSAP 评估事故严重性与乘员状态。
数据采用 ASN.1 编码,详见附录 A。概念设计支持未来扩展,若无法扩展,将发布新版本。
6.2.3.2 对象标识符OID(Object Identifier)
OID 用于唯一标识附加数据的格式、语法与语义。关于eCall中OID使用的更多详细信息,请参阅CEN标准EN 15722
触发事故信息的这一附加数据概念已被Euro NCAP注册,OID 为:1.0.14817.106.2.1.2.8。由于本文档描述了数据概念的第一个版本,因此要使用的OID是1.0.14817.106.2.1.2.8.1。
6.3 最小数据集MSD 的内容
以下子条款定义了在自动紧急呼叫中,嵌入 Euro NCAP 附加数据后,MSD 应包含的最小数据集内容。
6.3.1 MSD 基本内容
表 1 提供了 MSD 语义内容摘要,完整定义参见 EN 15722。

6.3.2 可选附加数据内容表 2 给出了在 MSD 的可选附加数据字段中嵌入本“事故信息”附加数据概念时,其语义内容摘要。
数据元素的出现顺序必须与表 2 一致,并按 6.2.2 所述的 ASN.1 UPER 规则进行编码。
为便于阅读,表 2 中的“类型”列仅为语义描述,精确语法见附录 A 的 ASN.1 定义。
MSD 中的 OID 数据元素被定义为 RELATIVE-OID,即所有 eCall 附加数据概念共有的前缀1.0.14817.106.2.1.2 无需传输,因此本概念的OID字段值应为8.1。
各数据元素的详细含义、取值及用法见 第 7 章。


触发碰撞的位置,可取值:
• unknown – 未知是否发生碰撞
• none – 未检测到碰撞
• front – 车辆前方
• rear – 车辆后方
• driverSide – 驾驶员侧
• nonDriverSide – 副驾驶员侧• other – 其他/未指明位置
翻滚检测:若车辆不具备翻滚检测能力,则省略;否则填 true / false。
6.4 操作模式
任何 IVS(车载系统)均可在自动触发的 eCall 所发送的 MSD 中嵌入本 Euro NCAP 附加数据概念,但必须同时满足:
• 数据在 eCall 触发时刻已可用;• 数据准确无误。➜ 禁止在手动触发的 eCall 的 MSD 中嵌入本数据概念。
PSAP 按 EN 15722 规定从 MSD 中提取 oid 与可选附加数据。若 oid = 8.1,则表明 MSD 携带了本概念定义的事故附加数据。
PSAP 使用附录 A 的 ASN.1 定义对可选附加数据进行 UPER 解码。解码后的字段值可呈现给接警员或转发至救援力量,用于:
• 快速判断碰撞部位与严重程度;
• 评估是否需要派遣更多资源(如重型救援、直升机等);• 提前准备创伤治疗方案。
7. 触发事故信息元素
CEN 标准仅规定了自动 eCall 触发的功能要求:当车载逻辑判断发生“严重事故”时,应触发自动紧急呼叫。是否“严重”由制造商自行定义决策逻辑。
基于长期经验,Euro NCAP 发现少数几个数据元素被广泛使用,其数值对救援服务极具参考价值。
7.1 碰撞(Impact)
尽管并非所有“严重”事件都伴随碰撞,但大多数事件确实存在碰撞,碰撞及其位置对判断事故严重性至关重要。
车辆可能装有碰撞传感器,甚至能识别碰撞位置。本文定义的数据概念中,“碰撞检测与位置”为必选元素,用于描述导致自动 eCall 的初始事件。
⚠️ 本数据概念仅反映触发自动 eCall 的初始事件。在 eCall 触发之后发生的任何二次碰撞,不会被纳入首次 MSD 数据,即使 PSAP 后续请求更新 MSD 也不包含。
目的在于避免:
• 传感器在首次碰撞后失效导致的误报;• 记录乘员已离车后发生的事件。
示例:
典型“追尾相撞”中,车辆通常先撞到前车或被后车撞击,此时应分别填 front 或 rear;若前后同时受力,则填 other。
7.1.1 碰撞位置(Location of impact)任何嵌入本数据概念的车辆,即使未装碰撞传感器,也必须在 MSD 中提供碰撞位置元素。救援方可根据该值推断现场情况:
unknown:车辆未装碰撞传感器,或传感器故障,或任何原因导致无法判断是否发生碰撞。
none:传感器正常工作,未检测到碰撞;自动 eCall 由其他传感器触发(如翻滚、急减速)。
front / rear:传感器确认碰撞发生在车辆前部 / 后部。
driverSide:传感器确认碰撞发生在驾驶员一侧(单车座椅时任意侧均报此值)。
nonDriverSide:传感器确认碰撞发生在驾驶员对侧。
other:传感器确认碰撞发生在上述位置之外,或多处同时碰撞。
7.1.2 翻滚(Rollover)
翻滚是特殊情形,并非所有车辆配备翻滚传感器。即使配备,翻滚也可能在 eCall 触发之后发生。因此:
• 若车辆无翻滚检测能力,则 MSD 中省略翻滚检测元素;
• 若配备传感器,则按实际检测结果填写:false:传感器未检测到翻滚;自动触发eCall由其他原因引起。true:传感器在触发事件中检测到任何形式翻滚。
7.2 车速变化
判断事故严重性的关键指标之一是碰撞前后车速差(Δv)。
Euro NCAP 定义时间窗:t0(碰撞前瞬间)至 t1 = t0 + 250 ms,计算:Δv = v(t1) − v(t0)
采用车辆坐标系如下图所示:
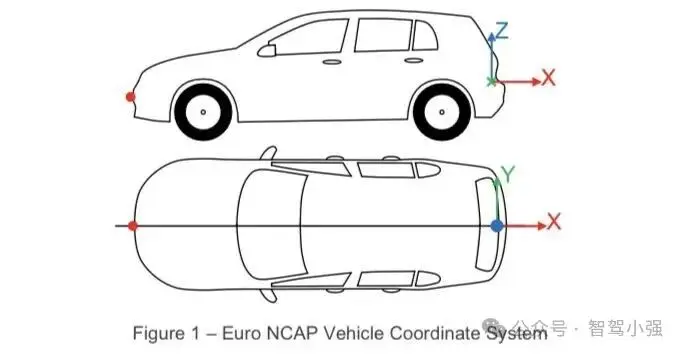
• X 轴:纵向,正向为后方;
• Y 轴:横向,正向为右侧;• Z 轴:垂直向上。
符号约定:
ΔvX 为正:车辆减速(向前行驶时被撞击或制动);
ΔvY 为正:车辆向右加速(如左侧受撞);
ΔvY 为负:车辆向左加速(如右侧受撞)。
大多数车辆的 Δv 检测范围有限,因此:
• 当报告值等于 +rangeLimit 时,表示“Δv ≥ 上限”;
• 当报告值等于 −rangeLimit 时,表示“Δv ≤ −下限”;• rangeLimit 须由车辆/系统厂商在 MSD 中如实填写,无统一固定值。



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
