




 广告
广告





















































E-NCAP2026对前向碰撞避免的要求V1.0 1️⃣

1. 背景&定义&测试设备
2. 测试条件
3. 测试程序
4. 测试执行
5. 评估标准和评分
6. 鲁棒性层的适用性和障碍物尺寸
1. 背景&定义&测试设备
2026年1月起,欧洲新车测评规程将实行ENCAP2026-2028版。
由前文《E-NCAP2026总体评估方案》可知,ENCAP2026分为四部分,分别是:
安全行驶Safe Driving
碰撞避免Crash Avoidance
碰撞保护Crash Protection
撞后安全Post Crash Safety
安全驾驶碰撞避免碰撞保护事故后安全乘员监测30正面碰撞60正面碰撞40救援信息40驾驶员参与度30车道偏离碰撞20侧面碰撞35事故后干预25车辆辅助40低速碰撞20追尾碰撞5车辆破拆35--VRU碰撞20-权重:20%权重:20%权重:50%权重:10%
碰撞避免Crash Avoidance满分100分,分为前向碰撞避免(60分)、车道偏离碰撞避免(20分)、低速碰撞避免(20分)三部分。
碰撞避免前向碰撞60车辆和摩托车40行人和自行车20车道偏离碰撞20仅自车10车辆和摩托车10加速抑制20车辆和摩托车10行人和自行车10
前向碰撞避免的60分中,车辆和动力两轮车(摩托车)总分为40分,行人和自行车骑行者总分为20分。
需要注意的时,ENCAP2026相比过往版本新增了扩展场景和鲁棒性测试,标准场景满分只有80%,扩展场景有10%的得分,鲁棒性测试有10%的得分。
峰值制动系数PBC(Peak Braking Coefficient):使用UNECE R13H中规定的方法,根据混动轮胎的最大减速量测量轮胎与路面的摩擦。
被测车辆VUT(Vehicle under test):指根据本协议测试的车辆,配备了预碰撞缓解或避免系统。
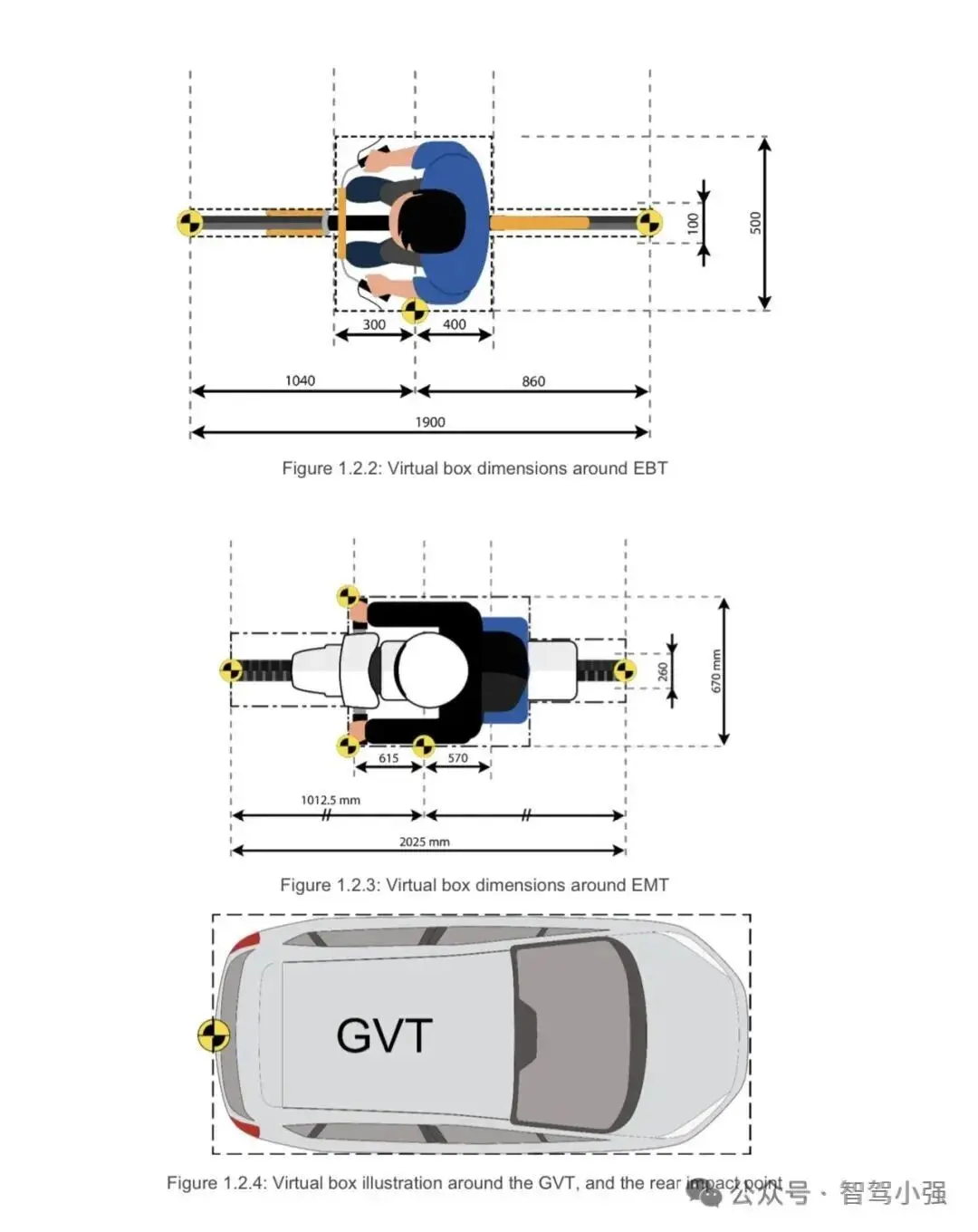
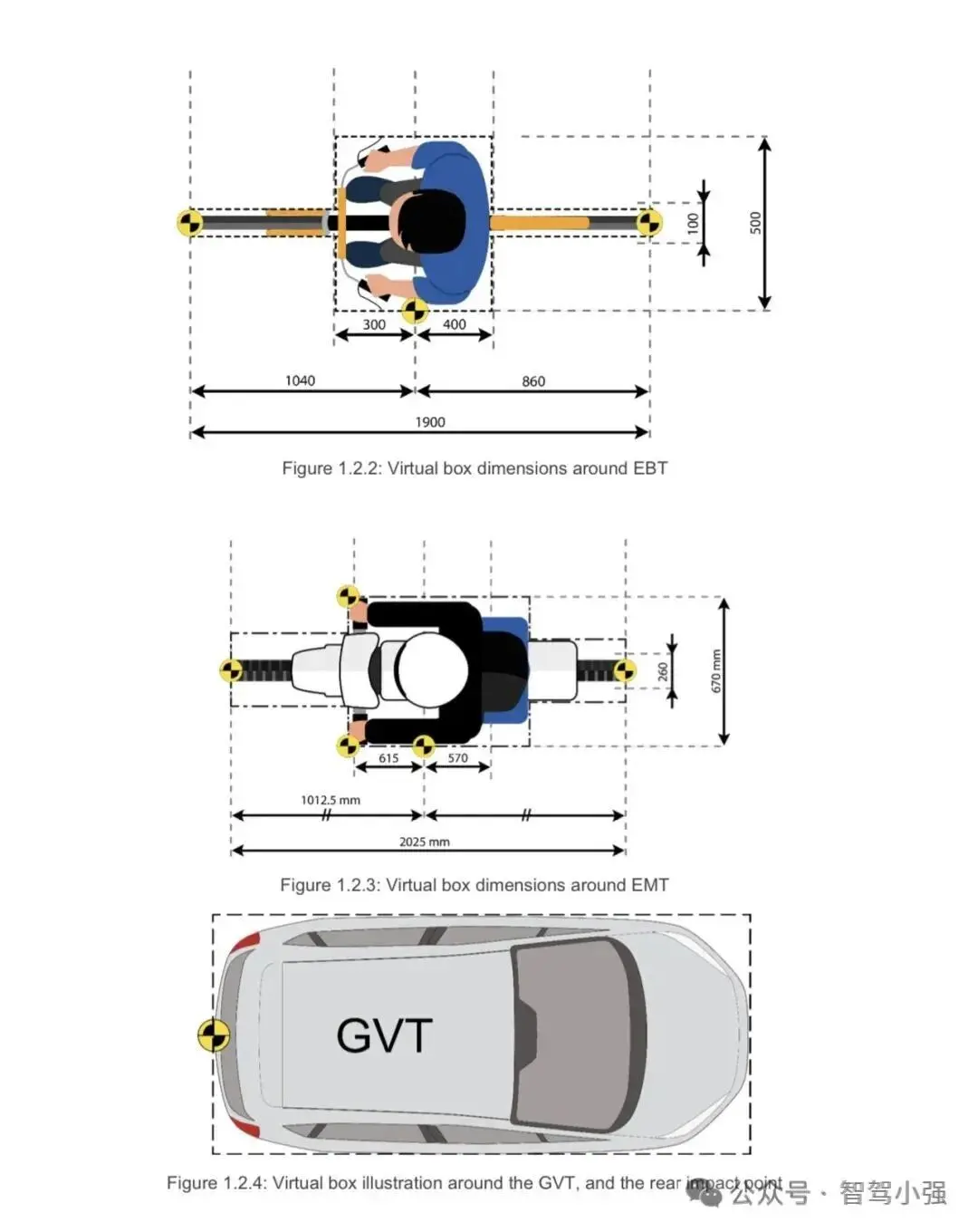
全球车辆目标GVT(Global Vehicle Target):指ISO 19206-3:2021中定义的本协议中使用的车辆目标。
ENCAP成人目标EPTa:指ISO 19206-2:2018中规定的本协议中使用的关节式成人行人目标。
ENCAP自行车骑手目标EBTa:指ISO 19206-4:2020中规定的本协议中使用的成人自行车骑手和自行车目标。
ENCAP儿童目标EPTc:指ISO 19206-2:2018中规定的本协议中使用的关节式儿童行人目标。
ENCAP摩托车骑手目标EMT:指本协议中使用的摩托车手骑目标,在发布时将引用ISO 19206-5中定义的摩托车骑手和摩托车目标。
真实摩托车(Real Motorcycle):指可以在本协议的盲点监测测试中使用的摩托车骑手目标,作为EMT的替代方案。真实摩托车应是一种经过型式认证的两轮摩托车,设计最大速度至少为80km/h,没有前整流罩或挡风玻璃。它应与EMT非常相似,从而保持在欧洲注册最多的中型摩托车裸车的平均尺寸范围内,即轴距在1405~1445mm之间。
自动紧急制动AEB(Autonomous Emergency Braking):年辆在检测到可能发生碰撞时自动施加的制动,以降低车速并可能避免碰撞。
前向碰撞警告FCW(Forward Collision Warning):车辆在检测到可能发生碰撞时自动提供的视听警告,以提醒驾驶员。
自动紧急转向AES(Autonomous Emergency Steering):车辆在检测到可能发生的碰撞时自动应用的转向,以引导车辆并可能避免碰撞。
紧急转向支持ESS(Emergency Steering Support):一种系统,检测到可能的碰撞时响应驾驶员的转向输入,以改变车辆路径并可能避免碰撞。
车辆宽度(Vehicle width):忽略后视镜、侧标灯、轮胎压力指示器、方向指示灯、位置灯、柔性挡泥板和轮胎侧壁与地面接触的变形偏转部分的车辆最宽值。
汽车对行人(Car-to-Pedestrian):当没有刹车和/或转向动作时,车辆与其路径上的成人或儿童之间的碰撞。
汽车对自行车骑手(Car-to-Bicyclist):当没有刹车和/或转向动作时,车辆与成年自行车骑手在其路径上发生碰撞。
汽车对摩托车骑手(Car-to-Motorcyclist):当没有利车和/或转向时,车辆和摩托车骑手在其路径上发生碰撞。
标准范围(Standard range):最基本、参数最受控的标准测试场景。标准范围内的测试被认为是任何给定测试场景的基本性能期望。
扩展范围(Extended range):是指在标准范围的测试中引入较小复杂程度的测试点。该范围的变化仅限于VUT和/或测试目标的撞击位置和纵向速度的变化。

鲁棒性层(Robustness layer):指引入测试复杂性和变化,旨在挑战车辆系统并鼓动可靠的“真实世界”性能。
碰撞时间TTC(Time To Collision):指VUT撞击测试目标之前的剩余时间,假设VUT和测试目标将继续以其行驶速度行驶。
TAEB:表示AEB系统激活的时间。激活时间是通过识别滤波后的加速度信号低于 -3 m/s²的最后一个数据点来确定的,然后返回到加速度第一次穿过 -1 m/s²的时间点。
TFCW:表示FCW的声音警告开始的时间。起点由声音识别(采集系统采集到的时间)确定。
TDriver_steer:指转向机器人向测试驾驶员移交控制权的起始时刻。自此时刻起,测试驾驶员应双手握稳方向盘并保持中立位置,模拟自然驾驶,避免剧烈或过于激进的转向输入。
TDriver_throttle:指油门机器人向测试驾驶员移交控制权的起始时刻。自此时刻起,测试驾驶员应通过油门踏板手动维持目标车速,模拟自然驾驶,避免剧烈或过于激进的加速输入。
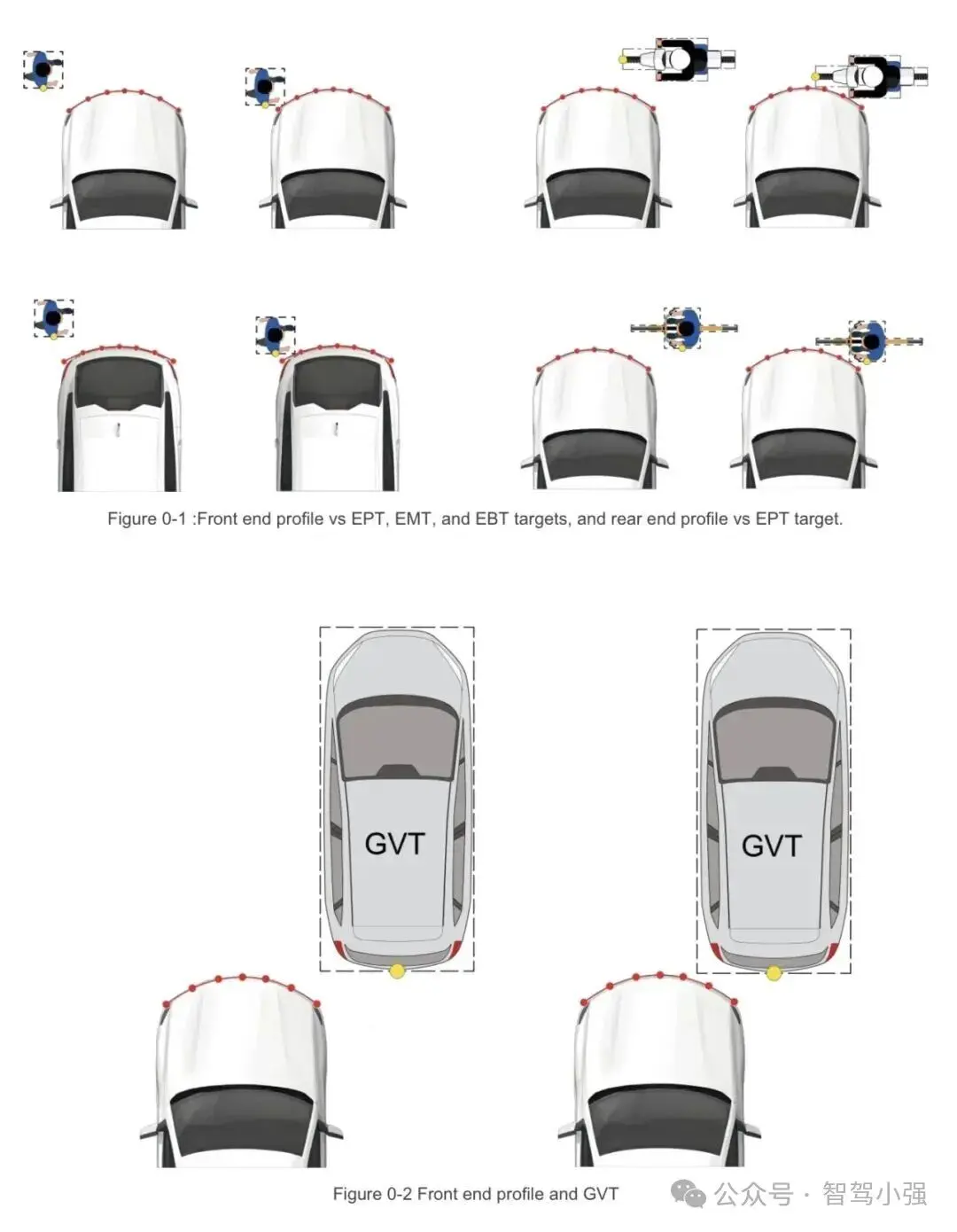
Vimpact:表示VUT前端或后端周围的轮廓线与测试目标(EPTa、 EPTc、EBTa和EMT)周围的虚拟框重合时的速度。
Vrel_test:是指测试开始时VUT和测试目标(GVT、EPT、EBT或EMT)之间的纵向相对速度,方法是VUT的纵向速度中减去测试目标的纵向速度。
Vrel_impact:是指碰撞瞬间VUT与测试目标(GVT、EPT、EBT或EMT)之间的纵向相对速度,方法是碰撞时的Vimpact减去试验目标的纵向速度。
汽车对行人的远端成人(CPFA):一种碰撞,在这种碰撞中,车辆向前行驶,朝者从远端穿过其路径的成年行人,当没有刹车动作时,车辆的正面结构将撞到行人。
汽车对行人的近端成人(CPNA):一种碰撞,在这种碰撞中,车辆向前行驶,朝着从近端穿过其路径的成年行人,当没有刹车动作时,车辆的正面结构将撞到行人。
主驾侧为远端,副驾侧为近端。
我国的左舵车,远端为左侧,近端为右侧。
英国/日本的右舵车,远端为右侧,近端为左侧。
汽车对行人的侧面儿童遮挡(CPNCO):一种碰撞,在这种碰撞中,车辆向前行驶,一个儿童行人从近端遮挡后面跑出穿过车辆的路径,当没有刹车动作时,车辆的正面结构将撞到行人。
汽车对行人的纵向成人(CPLA):一种碰撞,在这种碰撞中,车辆向前行驶,朝着车辆前面同向行走的成年行人,当没有制动动作时,车辆会撞到行人。
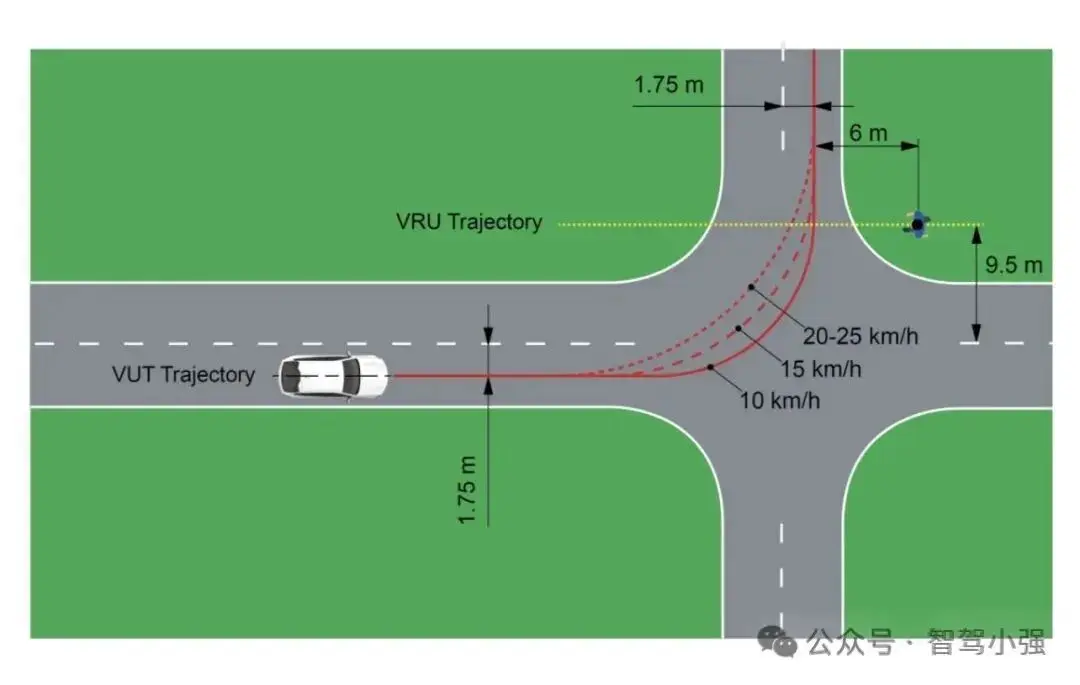
汽车对行人的转弯成人(CPTA):一种碰撞,在这种碰撞中,车辆在路口转弯时遇到穿过其路径的成年行人(在VUT转弯之前,与VUT的方向相同或相反),当没有刹车动作时,车辆将在车辆宽度的50%处撞击行人。
汽车对自行车骑手的近端成人(CBNA):一种碰撞,在这种碰撞中,一辆汽车向前行驶,朝着从近端穿过其路径的成年自行车骑手,当没有刹车动作时,车辆的正面结构将撞击自行车骑手。
汽车对自行车骑手的近端成人遮挡(CBNAO):一种碰撞,在这种碰撞中,车辆向前行驶,一个自行车骑手从近端遮挡后面骑出穿过车辆的路径,当没有刹车动作时,车辆的正面结构将撞到自行车骑行人。
汽车对自行车骑手的远端成人(CBFA):一种碰撞,在这种碰撞中,一辆汽车向前行驶,朝着从远端穿过其路径的成年自行车骑手,当没有刹车动作时,车辆的正面结构将撞击自行车骑手。
汽年对自行车骑手的纵向成人(CBLA):一种碰撞,在这种碰撞中,车辆向前朝着与车辆前方相同方向骑行的自行车骑行者行驶,当没有制动动作或在FCW后启动回避转向动作时,车辆将撞击自行车骑行者。
汽车对自行车骑手的转弯成人(CBTA):一种碰撞,在这种碰撞中,一辆汽车转向一名穿过其路径的自行车手,自行车以VUT转弯前相反的方向骑行,当没有利车动作时,车辆的正面结构将撞击自行车骑手。
汽车对摩托车骑手的后部静止(CMRs):一种碰撞,其中车辆向前行驶,朝向静止的摩托车手,车辆的正面结构撞上摩托车的后部。
汽车对摩托车手的后部制动(CMRb):一种碰撞,其中车辆向前行驶,朝着以恒定的速度行驶的摩托车手,然后摩托车骑手减速,车辆的正面结构撞击摩托车的后部。
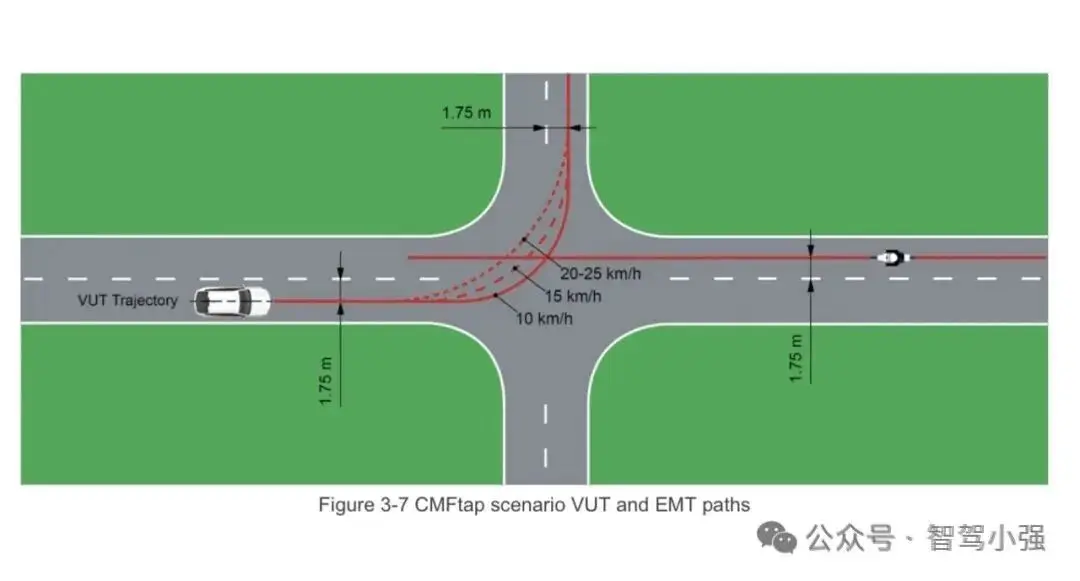
汽车对摩托车手的转弯穿越路径(CMFtap):一种碰撞,其中车辆以恒定速度穿过迎面而来的摩托车手的路径,车辆的正面结构撞到摩托车的前部。
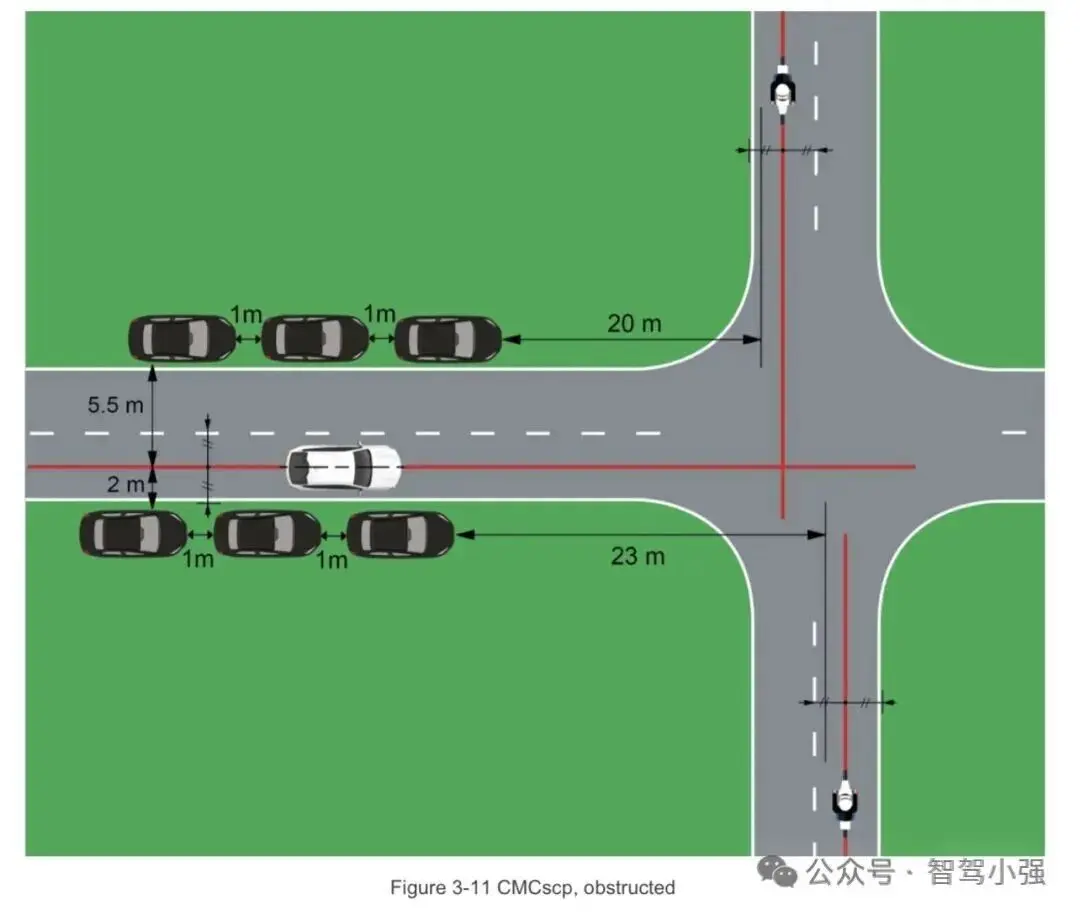
汽车对摩托车手的横穿直行(CMCscp):车辆沿着直道穿过路口向前行驶,朝向垂直穿越路口的摩托车手的碰撞。被测车辆VUT的正面结构撞击摩托车的侧面。
车对车的后部静止(CCRs):一种碰撞,其中被测车辆向前行驶,朝向静止的另一辆车,车辆的正面结构撞上另一辆车的后部。
车对车的后部移动(CCRm):一种碰撞,其中被测车辆向前行驶,向另一辆以恒定的速度行驶的车前进,车辆的正面结构撞上另一辆车的后部结构。
车对车的后部制动(CCRb):一种碰撞,其中被测车辆向前行驶,向另一辆以恒速行驶的车前进,然后前车减速,VRU的正面结构撞上前车的后部结构。
车对车的转弯穿越路径(CCFtap):一种碰撞,其中VRU在对向行驶的车辆的路径上转弯,VRU的正面结构撞上另一辆车的正面结构。
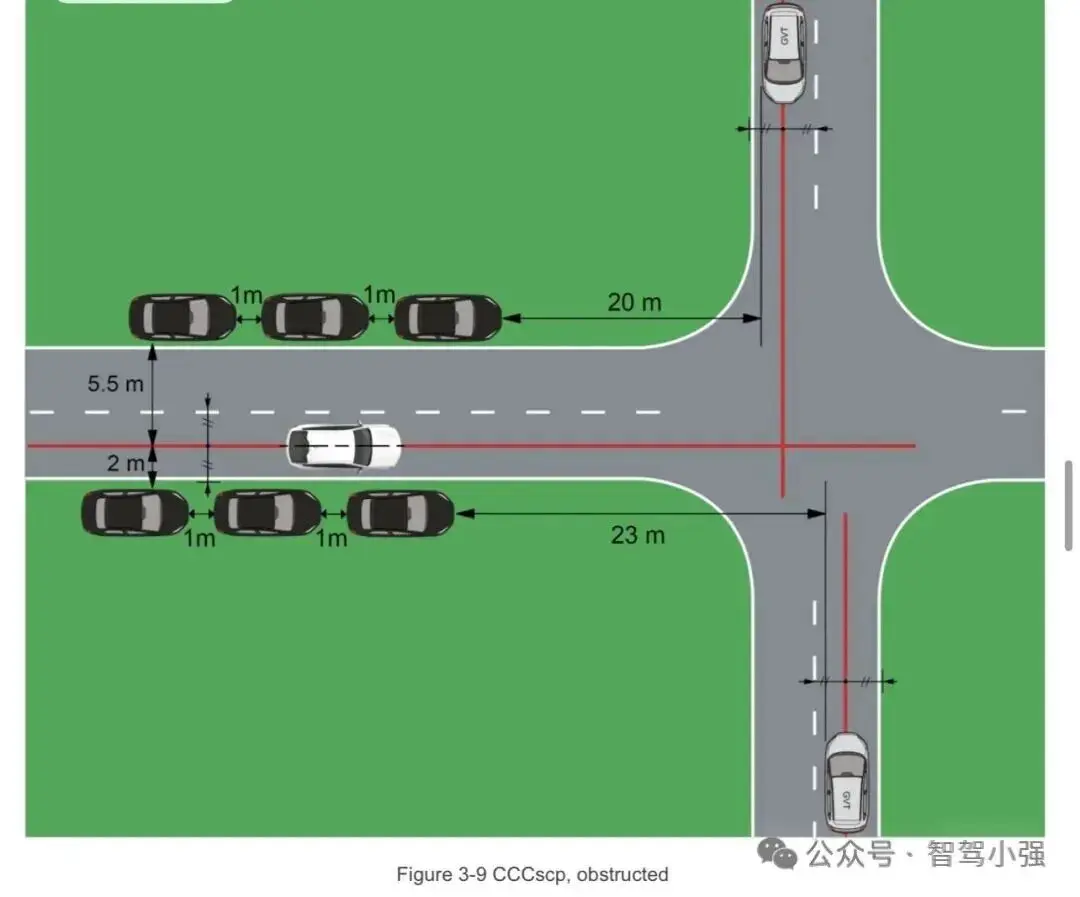
车对车的穿越直行(CCCscp):车辆沿着直道穿过路口向前行驶,朝向垂直穿越路口的另一辆车的碰撞。被测车辆VUT的正面结构撞击另一辆车的侧面。
车对车的对向来车直行(CCFhos):一种碰撞,VUT在其车道内沿着直线行驶,撞上了另一辆逆向行驶的车辆,该车己经漂移到与VUT相同的车道。VUT的正面结构撞上了另一辆车的正面结构。
车对车的对向来车换道(CCFhol):一种碰撞,VUT在其车道内沿着直线行驶,撞上了另一辆逆向行驶的车辆,该车辆故意进入VUT的车道试图超车。VUT的正面结构撞上了另一辆车的正面结构。
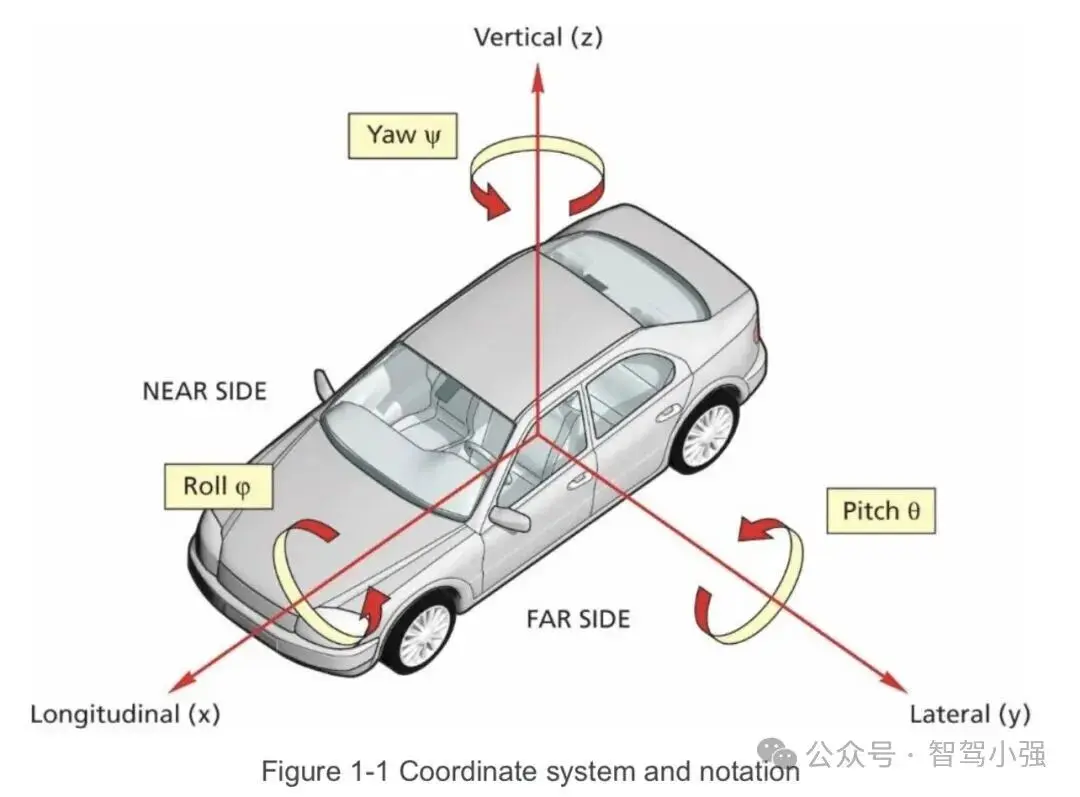
1.1 参考坐标系
使用ISO 8855:2011中规定的约定,原点位于VUT中心线上的最前方点,用于动态数据测量。如下图所示,该参考系统应用于左驾驶和右驾驶车辆。在图中,左舵车辆显示了近侧和远侧。对于右舵车辆,近侧和远侧刚好反过来。
1.2 测试车辆VUT纵向路径误差
1.2.1 车对车
VUT 纵向路径误差定义为:在测试中,当 GVT 前端的单一“稳定”参考位置固定时,VUT 前端期望位置与实测位置之差。
VUT 纵向路径误差 = XVUT, desired – XVUT, actual(@XGVT)
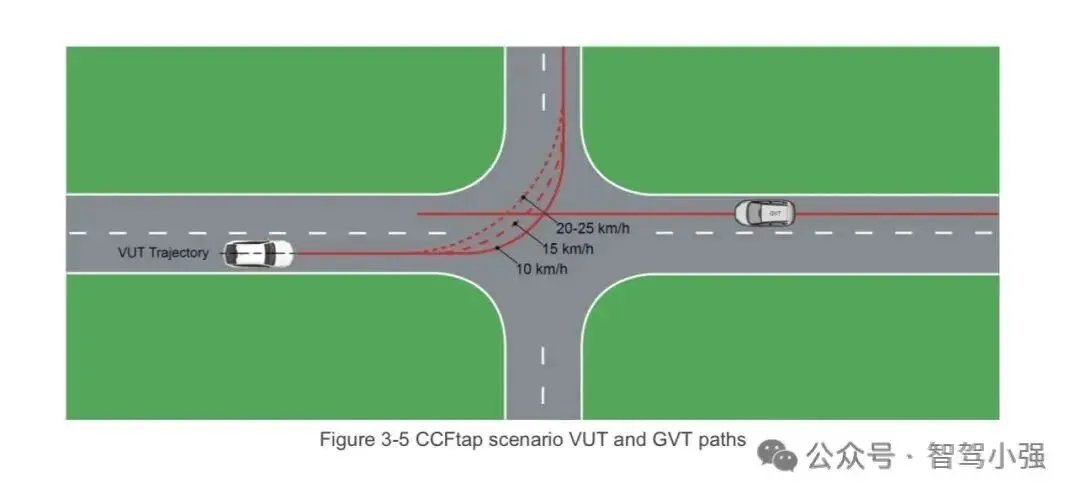
对于 CCFtap 场景,当坐标系原点设在预期碰撞点时,应使用下表数值计算 VUT 纵向路径误差:
VUT 速度目标速度XVUT, desiredXGVT10 km/h30 km/h−9.57 m29.17 m45 km/h43.75 m60 km/h58.33 m15 km/h30 km/h−14.53 m29.17 m45 km/h43.75 m60 km/h58.33 m20 km/h30 km/h−19.47 m29.17 m45 km/h43.75 m60 km/h58.33 m25 km/h30 km/h−24.33 m29.17 m45 km/h43.75 m60 km/h58.33 m
1.2.2 车对摩托车在 CMFtap 场景中,VUT 纵向路径误差定义为:在测试中,当 EMT 前端的单一“稳定”参考位置固定时,VUT 前端期望位置与实测位置之差。
VUT 纵向路径误差 = XVUT, desired – XVUT, actual(@XEMT)
当坐标系原点设在预期碰撞点时,应使用下表数值计算 VUT 纵向路径误差:
VUT 速度目标速度XVUT, desiredXEMT10 km/h30 km/h−10.66 m33.33 m45 km/h50.00 m60 km/h66.66 m15 km/h30 km/h−16.39 m33.33 m45 km/h50.00 m60 km/h66.66 m20 km/h30 km/h−20.02 m33.33 m45 km/h50.00 m60 km/h66.66 m25 km/h30 km/h−27.60 m33.33 m45 km/h50.00 m60 km/h66.66 m



 广告
广告 



最新资讯
-
展会预告 | TCT亚洲展倒计时!思看科技五大
2026-03-10 20:50
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
