




 广告
广告





















































新能源汽车碰撞严重度评估的安全检测机制简述

一、系统概述
本方案旨在为新能源汽车在进行碰撞严重度评估时提供一种高效、可靠的安全检测参考机制,以确保在车辆发生碰撞时系统能够准确评估碰撞的严重程度,并根据评估结果决定是否启动相应的安全措施。
二、系统架构
根据车载系统的常规划分方式将该系统按照层级划分为:感知层、数据处理层、决策层以及执行层四部分。
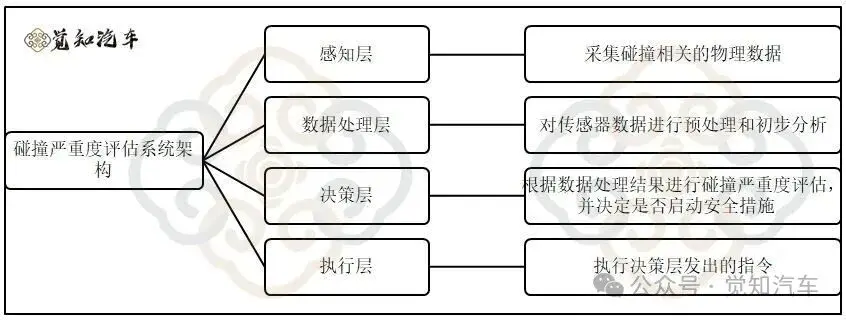
图1 系统划分
其中,感知层由诸多车载传感器构成,负责采集车辆碰撞相关的物理数据。传感器采集到的数据被传输至控制单元中,控制单元的数据处理模块负责对这些数据进行预处理和初步分析,并将结果传递给决策模块,决策模块对预处理后的数据进行碰撞严重度评估,并基于评估结果决定是否启动安全措施。当系统决策需执行相关安全措施时,将该执行指令发送给相关执行器,此时执行器将执行如展开安全气囊、激活安全带预紧器等动作。
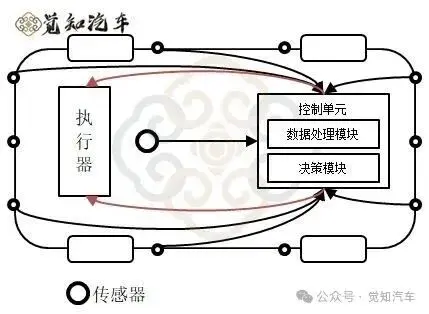
图2 系统架构
三、系统关键组件及功能
3.1.感知层组件
在系统感知层中所涉及到的关键组件以各类传感器为主,如:
1)加速度传感器:该传感器分布于车身的不同位置,用于检测车辆碰撞时的线性加速度变化。
2)角速度传感器(陀螺仪):通常位于车辆的底盘偏中心位置处,用于检测车辆碰撞时的旋转状态。
3)位移传感器:此类传感器大多分布在车身如防撞梁、A/B柱内部等关键结构上,用于检测碰撞导致的结构形变状态。
4)压力传感器:通常安装在保险杠内部,用于检测碰撞初期的压力变化。
5)摄像头:随着新能源汽车智能化程度的提升,碰撞检测机制开始融合相关视觉信息,以捕捉车辆碰撞前后的视觉变化,目前应用并不多。
3.2.控制单元
控制单元负责数据的融合、处理与决策,与传统碰撞系统应用的关键差异是通过多传感器数据融合技术的应用,并引入视觉数据进一步对碰撞严重度进行精细化分析,以提供更准确的识别结果,防止【碰撞而不执行】。
3.3.执行器
执行器以主动安全系统的应用为关键,其中直接的碰撞执行器如安全气囊、安全带预紧等,间接的执行器如ESC等系统,可协助碰撞发生时稳住车辆状态。
四、系统策略流程
4.1.数据采集与处理
当车辆处于上电状态时,各类传感器实时采集相关数据并传输给控制单元,控制单元在接收到数据后进行滤波、去噪等预处理操作,确保数据的准确性和可靠性。
4.2.碰撞检测
当在某一时刻的传感器数据的数据出现异常,系统将进入碰撞检测模式,并结合其他关键传感器数据对实际状态进行进一步分析。如当加速度传感器检测到超过阈值的加速度变化时,系统进入碰撞检测模式,并结合角速度传感器、位移传感器和压力传感器等的数据,进一步确认碰撞的发生。
4.3.数据计算
为识别车辆的碰撞状态,需对关键传感器所采集的数据设定阈值,并基于阈值对碰撞结果进行分析。不同传感器数据如下定义:
1)加速度传感器:设定峰值加速度apeak=max(|ax|,|ay|,|az|),其中ax,ay,az分别是x、y、z方向的加速度。
2)角速度传感器:设定峰值角速度ωpeak=max(|ωx|,|ωy|,|ωz|),其中ωx,ωy,ωz分别是x、y、z方向的角速度。
3)位移传感器:设定最大位移dmax=(d1,d2,d3…dn),其中dn是第n个位移传感器测得的位移值。
4)压力传感器:设定最大压力pmax=(p1,p2,p3…pn),其中pn是第n个压力传感器测得的压力值。
4.4.基于数据的碰撞状态分析
当某个传感器所采集的数值超过阈值时,系统开始对所有关键传感器数据变化进行多维度分析。首先峰值加速度apeak代表了碰撞瞬间的最大加速度,系统通过计算加速度随时间的变化率即da/dt以反映碰撞发生瞬间的剧烈程度,接着对碰撞过程中加速度进行积分,即 以反映总的能量传递。
以反映总的能量传递。
同理,对ωpeak、dmax、pmax进行分析,以反应碰撞发生时车辆旋转的剧烈程度、结构形变状态、冲击能量状态等,并结合摄像头捕捉的图像,进一步辅助识别碰撞类型(如正面碰撞、侧面碰撞、追尾等)。
4.5.基于碰撞状态的严重度评估
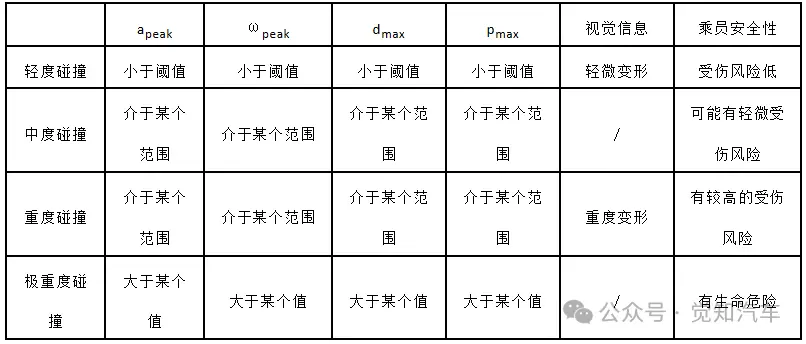
通过多维度传感器数据的综合应用,根据数据分析结果及最大数值状态,将碰撞状态分为若干个等级,每个等级对应不同的安全措施,并对照预先制定的分级方式来执行具体的动作。如我们预先对碰撞严重度进行了划分:
表1 基于多维度数据的碰撞严重度分析
基于严重度等级的划分,采用将多个维度的数据结合起来进行评分的综合评估模型。在制定评估模型时,需严格、细致、基于实际状态进行综合评估,以确定不同传感器数值的评分值与权重占比。如不同传感器在不同碰撞维度下所对应的评分及权重如下:
表2 评分示意
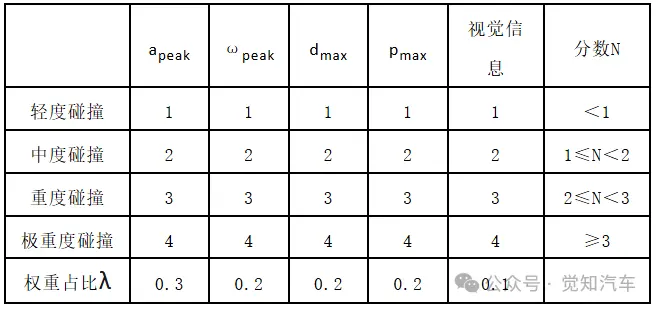
当系统检测到相关传感器的数值在某一维度时,便可对应出一个评分等级,这里采用简单的加权平均计算方式:综合评分=λ1*加速度评分+λ2*角速度评分+λ3*位移评分+λ4*压力评分+λ5*视觉评分。
4.6.决策与执行
控制单元根据综合评分结果来判断车辆碰撞的严重度,并基于严重等级向执行器发送不同的执行指令,以防止因为【小碰撞而误触发】或大【碰撞而不触发】的现象发生。如在某碰撞事故发生时,此时实际检测的传感器数值为a<apeak,X1<ω<Y1,X2<dpeak<Y2,p<apeak,同时保险杆脱落。对应的评分为a=1,ω=2,d=2,p=1,视觉=2,综合得分为1.5分,最终系统判定为中度碰撞事故。此时系统将根据此判定结果向执行器发出相关指令,如打开气囊等。
五、总结
通过融合多种传感器数据应用的综合判断方式,可在一定程度上提高新能源汽车在发生碰撞故事时对该事故状态的准确识别,基于此识别结果系统能够及时启动相应的安全措施,从而降低误触发或不触发的执行误差。



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
