




 广告
广告





















































百度Apollo车路协同自动驾驶典型实践场景和技术优势
2022-12-25 17:54:52· 来源:汽车测试网

应用效果:
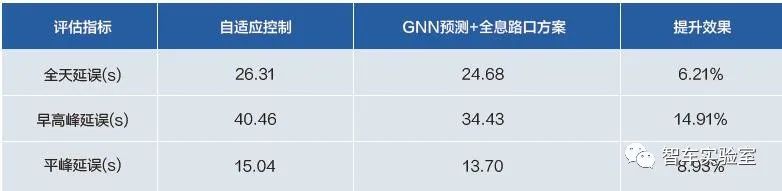
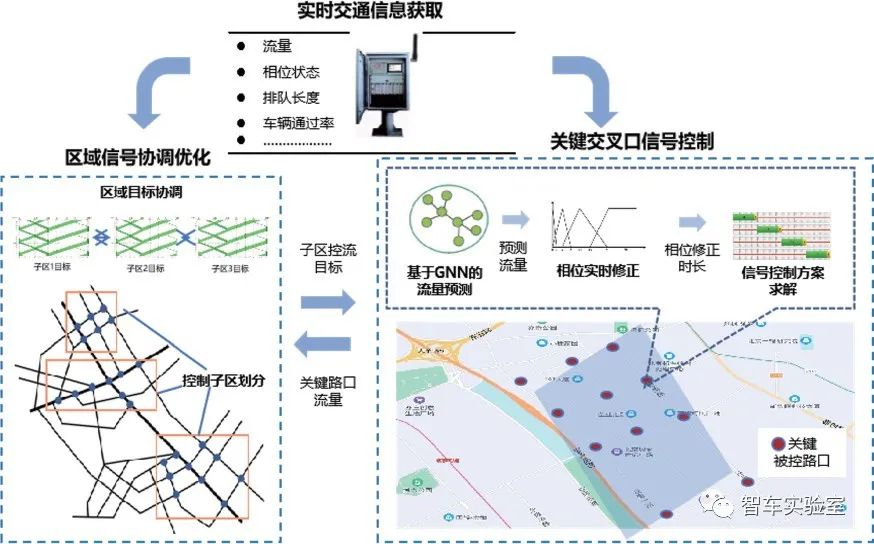
基于北京亦庄各个路口的实际交通流数据,分别采用自适应控制方法,以及基于GNN的数据预测 与补全方法(原理见图6.48),对区域信号灯进行优化控制性能比较,如表6.4所示,全天延误表示0点至24点内的平均延误;早高峰延误表示早7时至9时内的平均延误;平峰延误表示10时至16时 内的平均延误。结果表明,基于GNN的数据预测与补全方法,在不同时段内均可有效提升交通通 行效率,降低车均延误。
表 6.4 基于GNN预测的区域信号控制与自适应区域信号控制对比(亦庄)
图 6.48 基于GNN流量预测的区域信号控制示意图
- 下一篇:汽车车身结构设计分析浅析
- 上一篇:地图参考位置协议



 广告
广告 



最新资讯
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
