




 广告
广告





















































设计仿真 | 基于ODYSSEE人工智能CDC模型集成的整车动力学仿真

自动调节及不间断减振控制系统(Continuous Damping Control,CDC)是一种能够自动识别道路状况及不间断调节的减振控制系统。具备该系统的汽车能够实时根据车身形式状态对悬挂的软硬进行调节:中低速在城市道路行驶时,CDC可以降低悬挂阻尼的强度,保证车辆行驶的平稳性并提升驾乘舒适性;高速行驶或转向时,CDC可以瞬时提升悬挂阻尼的强度,从而加强车身稳定性,减小过弯侧倾;紧急制动时,CDC还可以通过提升悬挂阻尼强度来控制车身前倾姿态并缩短刹车距离。
CDC减振器实现主动减振功能的基础在于合适的设计以及良好的控制策略。因此在设计过程中需要不断地调试,但实车测试成本高昂,费时费力。而通过海克斯康工业软件旗下的多体动力学仿真软件Adams,可轻松实现整车在不同行驶工况下的仿真分析,从而缩短开发周期,提高工作效率。同时,智能实时仿真平台ODYSSEE能够基于CDC减振器仿真模型或实测数据,快速构建CDC减振器机器学习模型,并应用于Adams整车仿真分析中,从而帮助工程师更加高效地完成CDC减振器的设计工作。
CDC机器学习模型搭建
基于实际的CDC系统测试数据或设计数据,工程师可以在ODYSSEE中轻松构建其机器学习模型,从而实现对新输入参数下的响应进行快速预测。ODYSSEE中生成机器学习模型的步骤如下:
01、确定研究系统的输入参数和输出参数;02、准备搭建机器学习模型的相关数据,即在不同输入参数条件下的输出结果响应,可以是仿真数据,也可以是试验测试数据;
03、将准备好的数据拆分为训练数据和验证数据,训练数据用于机器学习的训练,验证数据用于训练好的机器学习模型校验,从而保证预测结果的精度;
04、通过尝试不同的机器学习算法以及相应的超参数,找到一种预测精度最高的机器学习算法供后续预测使用,至此完成机器学习模型的搭建。
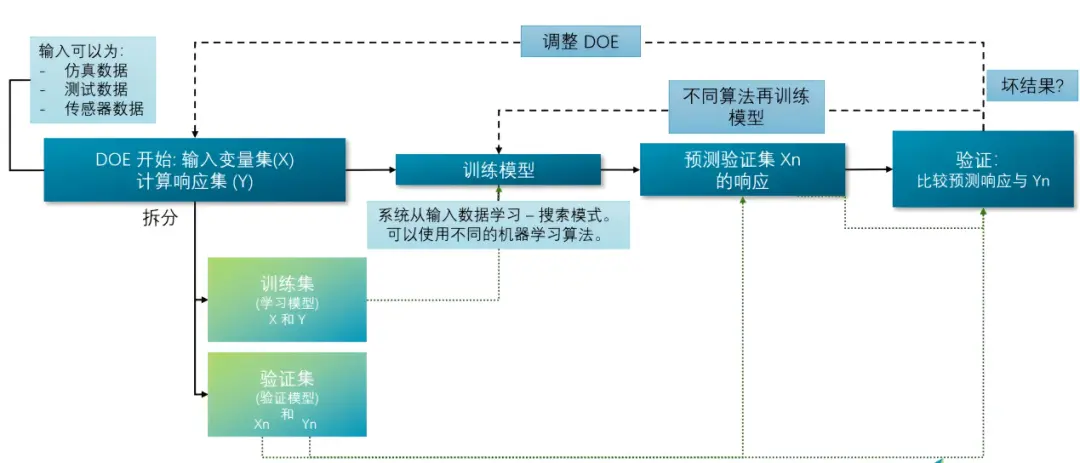
图1:ODYSSEE中构建机器学习模型的工作流程
此时,我们选择车速、车身加速度、车身俯仰、车身侧倾、转向5个变量作为CDC系统的输入参数,阻尼力值作为CDC系统的输出响应,来构建机器学习预测模型。针对训练好的CDC系统机器学习模型,在不同输入参数条件下进行了结果的对比,如图2所示。结果表明,机器学习预测模型能够与实际测试的阻尼力一致。
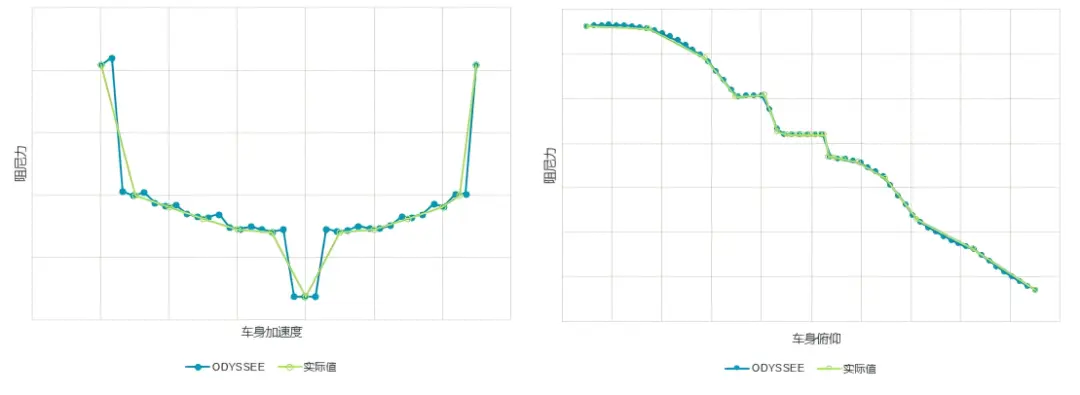
图2:CDC系统机器学习模型验证。左图:其他条件一定,阻尼力-车身加速度曲线。右图:其他条件一定,阻尼力-车身俯仰曲线。
ODYSSEE中训练完成的机器学习预测模型可以导出成为FMU格式的文件,供其他软件使用。目前ODYSSEE支持导出FMU 2.0和FMU 3.0,用户可以根据实际需求进行导出。这里我们将生成的FMU模型导入到Adams整车模型中,作为CDC系统部件进行使用和测试。
整车动力学集成仿真在Adams中搭建整车模型,在前悬架减振器中引入上述ODYSSEE训练完成的CDC系统机器学习模型,以提供阻尼力。Adams和ODYSSEE的集成工作流程如下所示:
01、Adams悬架模板中创建CDC阻尼力,定义系统状态变量作为信号传递纽带,建立整车模型动力学响应信号与CDC阻尼力控制信号的关联;02、Adams整车模型确定当前时刻车速、车身加速度、车身俯仰、车身侧倾、转向值,作为输入信号传递到ODYSSEE的FMU模型中;
03、ODYSSEE的FMU模型接收上述输入信号,基于机器学习模型快速计算相应参数下CDC系统的阻尼力值,作为输出信号传递到Adams整车模型中;
04、Adams整车模型接收CDC系统阻尼力值,更新整车状态以及新的输入信号,供下一时刻仿真使用。
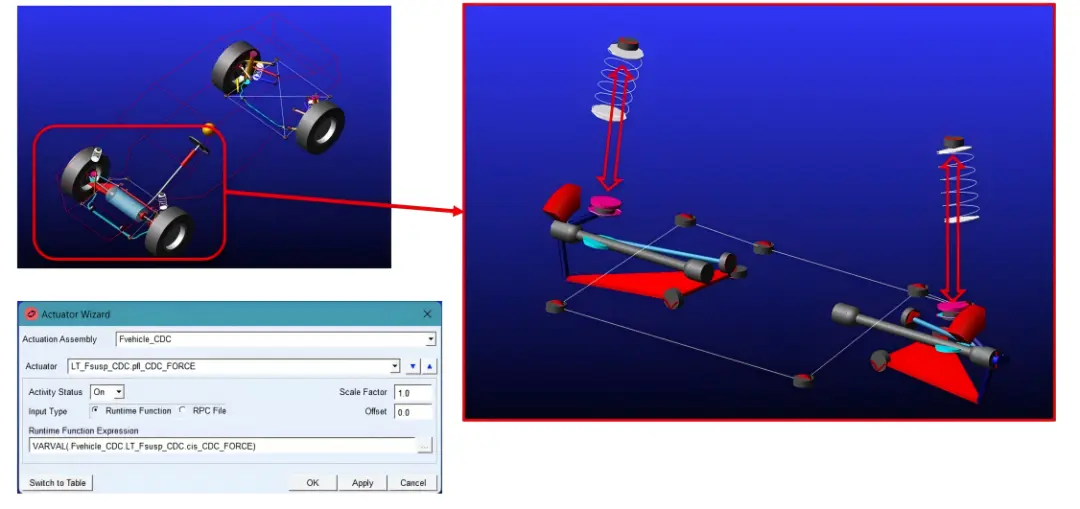
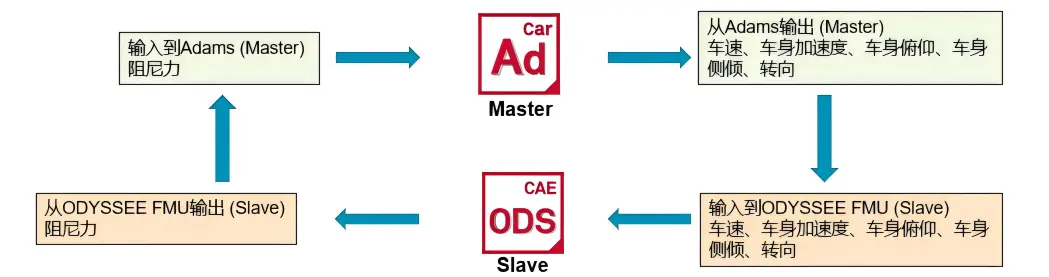
图3:Adams和ODYSSEE的集成工作流程
模型集成后,我们针对四种工况下的整车进行了仿真,并对比了有无CDC系统的整车响应差异:
工况1:路面为某试验场大鹅卵石路,行驶车速30km/h。
工况2:使用ISO标准双移线工况,车速为65km/h。
工况3:直线制动,初始车速为90km/h,制动加速度为-0.3g。
工况4:直线加速,初始车速为10km/h,驱动加速度为0.3g。
工况1仿真结果工况1仿真结果如图4所示,普通减振器车身垂向加速度响应明显,特别是在大冲击下,振动过滤较差;使用ODYSSEE机器学习的CDC减振器的车身加速度幅值较前者小,在大冲击下振动过滤明显。
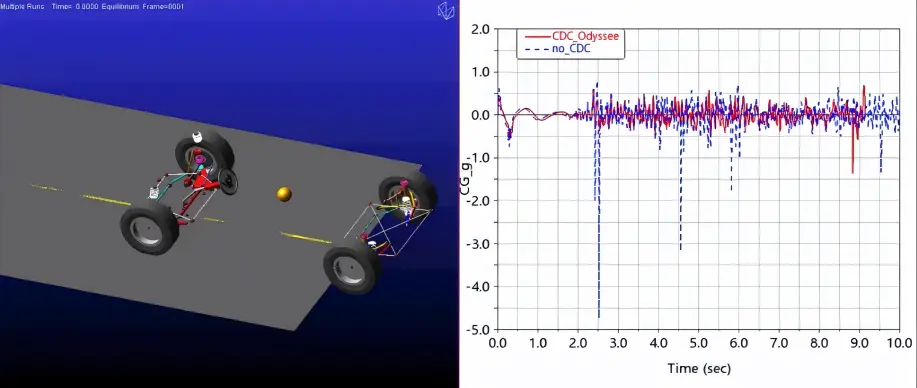
图4:工况1条件下,前悬架使用普通减振器(蓝色虚线)和CDC减振器(红色实线)的结果对比
工况2仿真结果工况2仿真结果如图5所示,普通减振器车辆模型和使用ODYSSEE机器学习的CDC减振器的车辆模型均能稳定通过双移线试验;使用CDC减振器的车身侧倾角较小,表现出更好的稳定性。
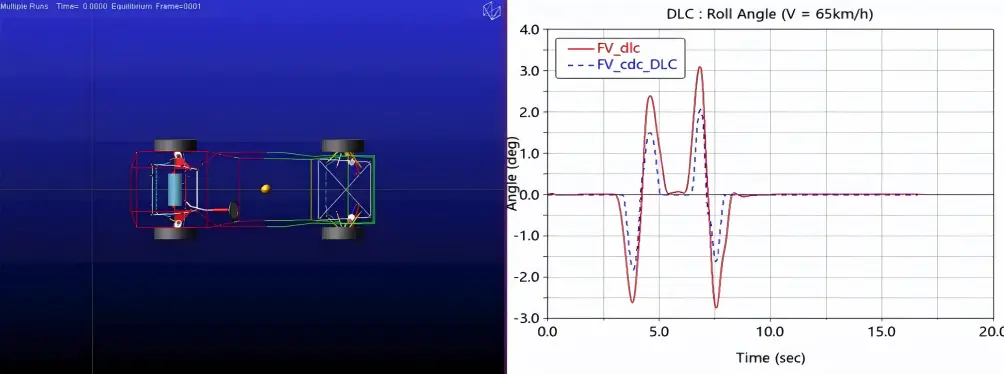
图5:工况2条件下,前悬架使用普通减振器(红色实线)和CDC减振器(蓝色虚线)的结果对比
工况3仿真结果工况3仿真结果如图6所示,使用ODYSSEE机器学习的CDC减振器的车身俯仰角较小,CDC减振器有效抑制了车辆在制动过程中俯仰角的变化。
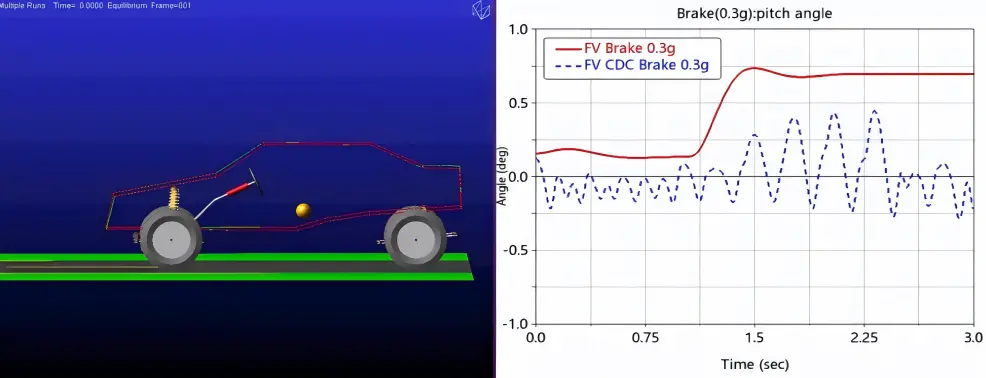
图6:工况3条件下,前悬架使用普通减振器(红色实线)和CDC减振器(蓝色虚线)的结果对比
工况4仿真结果工况4仿真结果如图7所示,使用ODYSSEE机器学习的CDC减振器的车身俯仰角较小,CDC减振器有效抑制了车辆在加速过程中俯仰角的变化。
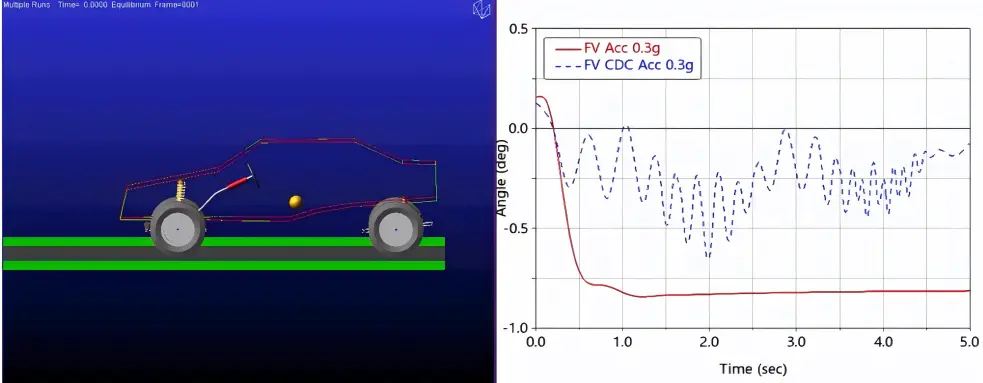
图7:工况4条件下,前悬架使用普通减振器(红色实线)和CDC减振器(蓝色虚线)的结果对比
结论
通过使用ODYSSEE,可基于试验测试数据快速构建CDC系统机器学习模型,并将其应用于Adams整车仿真分析中。同时,ODYSSEE支持将不同的CDC控制策略加入到机器学习模型中,帮助工程师快速完成CDC减振器的设计验证,以实现CDC减振器的高效设计目标。



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
