




 广告
广告





















































R171.01对DCAS的要求①③

1.背景
2.范围和定义
3.申请批准
4.批准
5.一般要求
6.DCAS功能的附加要求
7.DCAS运行监控
8.系统验证
9.系统信息数据
10.软件识别要求
11.系统安全要求
12.物理测试要求
13.模拟仿真要求
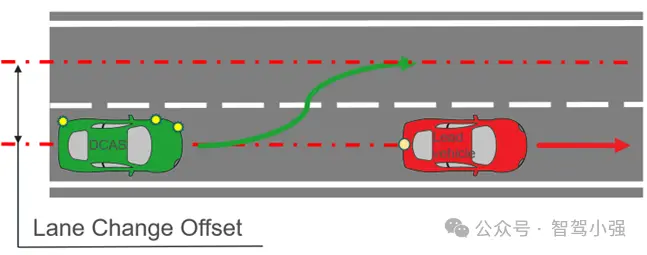
4.2.5.1.3 驾驶员确认或系统发起的变道
4.2.5.1.3.1 基础测试:测试应确认制造商声明的系统启动的变道能力。
4.2.5.1.3.1.1 系统启动LCP后,VUT应向相邻车道进行完全变道(3.5 m横向移位)。
4.2.5.1.3.1.2 在进行换道功能测试之前,VUT和前导车辆应在同一方向上直线行驶至少2秒钟,期间VUT与前导车辆的中心线偏移不超过1 m。
4.2.5.1.3.2 扩展测试:测试应证明系统在以下情况下能够协助驾驶员安全变道:
(a)前导车辆和VUT之间的其他速度差异;
(b)在没有物理隔离的道路上;和/或
(c)在不禁止行人和骑自行车者的道路上。
4.2.5.1.3.2.1 测试应至少执行:
(a)目标车道有对向来车或超车场景;
(b)不同的道路使用者从后方接近;
(c)在相邻车道旁边行驶的车辆防止变道;
d)另一辆车开始进入目标车道内的同一空间,DCAS系统做出反应避免潜在的碰撞风险
4.2.5.2 能够响应与申报的ODD相对应的另一道路使用者
4.2.5.2.1 在直线路段上的前方静止车辆CCRS
4.2.5.2.1.1 基础测试:测试应确认系统对直线路段上前方静止车辆的申报响应能力。
4.2.5.2.1.1.1 在试验开始前,VUT应以直线接近静止目标至少2秒,期间VUT与目标中心线的偏移不超过0.5m。
4.2.5.2.1.1.2 测试的功能部分应从以下内容开始:
(a)VUT在本段规定的公差和横向偏移范围内以所需的测试速度行驶;和
(b)DCAS车辆开始对目标做出反应之前的至少4秒的时间相对应的距离。
4.2.5.2.1.2 在测试功能部分开始和系统干预之间,应遵守公差要求。

4.2.5.2.1.3 扩展测试:测试应证明系统不会不合理地改变响应直线路段上前方静止车辆的控制策略。
4.2.5.2.1.3.1 测试应至少使用以下方式执行:
(a)不同类型或类别的静止车辆;
(b)位于VUT中心线更大偏移处的静止车辆;
(c)面向VUT的静止车辆,用于能够在非高速公路条件下运行的系统。
4.2.5.2.2 在弯曲路段上的前方静止车辆CCRS
4.2.5.2.2.1 基础测试:测试应确认系统对弯曲路段上前方静止车辆的申报响应能力。
4.2.5.2.2.1.1 目标车辆中心线与第一个弯道车道中心线之间的偏移不超过0.5m,目标车辆的后角在车道标记中心延长线上。
4.2.5.2.2.1.2 在弯曲路段开始之前,VUT车辆应以恒定速度沿着两侧均有车道标记的直线车道行驶足够的时间,以便横向控制功能将车辆控制在车道内恒定的位置。

4.2.5.2.2.2 扩展测试:测试应证明系统没有不合理地改变响应弯曲路段上前方静止车辆的控制策略。
4.2.5.2.2.2.1 测试应至少使用以下方式执行:
(a)不同类型或类别的静止车辆;
(b)静止的车辆,其位置与车道的中心位置偏离较大;
(c)静止车辆与车道中心线有一定的角度;
(d)面向VUT的静止车辆,用于能够在非高速公路条件下运行的系统。
4.2.5.2.3 直线路段上行驶速度较慢的车辆CCRM
4.2.5.2.3.1 基础测试:测试应确认系统在直线路段上对低速车辆目标的声明的响应能力。
4.2.5.2.3.1.1 在测试开始之前,VUT和低速车辆目标应沿同一方向直线行驶至少2秒钟,VUT与低速车辆目标中心线的偏移不超过0.5m。
4.2.5.2.3.1.2 目标车辆的速度比VUT慢50km/h。

4.2.5.2.3.2 扩展测试:测试应证明系统没有不合理地改变直线路段上响应低速车辆目标的控制策略。
4.2.5.2.3.2.1 测试应至少使用以下方式执行:
(a)不同类型或类别的低速车辆;
(b)一辆低速车辆,位于VUT中心线更大的偏移处。
(c)与VUT的速度相差更大的低速车辆。
4.2.5.2.4 领航车辆减速[新增]
4.2.5.2.4.1基础测试:该测试应确认系统在直线路段上减速车辆的申报响应能力。
4.2.5.2.4.1.1 VUT和目标应以50km/h的速度沿同一方向直线行驶,VUT应在测试功能部分之前至少两秒钟内以系统保持的稳态时间间隙跟随目标,VUT与目标中心线的偏移不超过0.5m。
4.2.5.2.4.1.2 试验应在车辆目标减速至4 m/s²的情况下进行。

4.2.5.2.4.2 扩展测试:测试应证明系统不会不合理地改变直线路段上减速车辆的控制策路。
4.2.5.2.4.2.1 试验应至少在以下条件下进行:
(a)不同类型或类别的减速车辆;
(b)位于VUT中心线较大偏移处的减速车辆;
(c) 减速较大的减速车辆;(d)不同的VUT和目标速度。
4.2.5.2.5 前车切出cut-out
4.2.5.2.5.1 基础试验:试验应确认系统对M1类前车切出的声明的响应能力。
4.2.5.2.5.1.1 切出的车辆应向相邻车道进行全变道(3.5m横向位移),以避开前方静止车辆目标,从TTC为3s时开始变道,纵向行驶44m时变道完成。
4.2.5.2.5.1.2 指示的TTC定义为领航前车(切出车辆)开始变道时,领航前车到静止目标的TTC。在领航前车变道期间,领航前车不使用转向灯。
4.2.5.2.5.1.3 切出车辆不得偏离其规定的路径超过±0.2m。
切出试验VUT领航前车(M1类)领航前车变道机动横向加速度车道变换长度转弯半径切出时的TTC为3秒70km/h50km/h1.5 m/s²44 m130 m

4.2.5.2.5.2 扩展测试:测试应证明系统没有不合理地改变响应领航前车切出的控制策略。
4.2.5.2.5.2.1 测试应至少使用以下方式执行:
(a)不同类型或类别的静止车辆目标;
(b)领航前车在小于3秒TTC时发生的切出;
(c)VUT和领航前车的不同速度;
(d)领航前车的不同横向加速度。
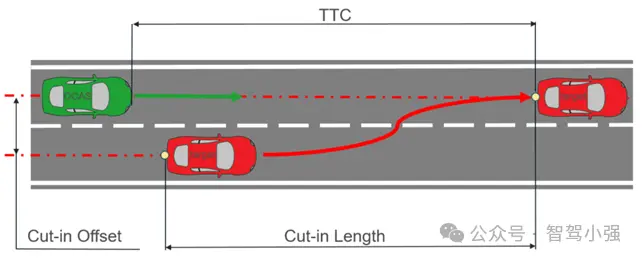
4.2.5.2.6 邻车道车辆切入cut-in
4.2.5.2.6.1 基础测试:测试应确认系统对车辆从相邻车道切入的声明的响应能力。
4.2.5.2.6.1.1 相邻车道上的车辆目标应向VUT的车道进行完全变道(3.5m横向位移)。
4.2.5.2.6.1.2 指示的TTC定义为目标车辆完成变道机动的时间点的TTC,其中切入目标车辆的后中心位于VUT的行驶车道中间。
4.2.5.2.6.1.3 切入车辆不得偏离其规定的路径超过±0.2m。
切入试验VUT切入车辆:全球车辆目标(GVT)GVT的变道机动横向加速度车道变换长度转弯半径类型1 TTC=0s50km/h10km/h0.5m/s²14 m15 m类型2 TTC=1.5s120km/h70km/h1.5m/s²60 m250 m
4.2.5.2.6.2 扩展测试:测试应证明系统没有不合理地改变响应从相邻车道切入车辆的控制策略。
4.2.5.2.6.2.1 测试应至少使用以下方式执行:
(a)不同类型或类别的切入车辆;
(b)以不同的TTC值发生的切入;
(c)不同速度的VUT和切入车辆;
(d)切入车辆的不同横向加速度。
4.2.5.2.7 车道前方静止行人目标CPLA
4.2.5.2.7.1 基础测试:测试应确认系统对静止行人的声明的响应能力。
4.2.5.2.7.1.1 行人目标应背对VUT,位于VUT的行驶路径内。
4.2.5.2.7.1.2 在试验开始前,VUT应以直线接近静止行人目标至少2秒钟。

4.2.5.2.7.2 扩展测试:测试应证明系统没有不合理地改变响应静止行人的控制策略。
4.2.5.2.7.2.1 测试应至少使用以下方式执行:
(a)行人目标位于车道内,但在VUT的行驶路径之外;
(b)面向不同方向的静止行人目标;
(c)不同大小的行人目标;
(d)VUT的不同速度。
4.2.5.2.8 车道前方静止自行车目标CBLA
4.2.5.2.8.1 基础试验:试验应确认系统对静止自行车目标和横向运动的自行车目标(如适用)的声明的响应能力。
4.2.5.2.8.1.1 自行车目标应位于VUT的行驶路径内,背对VUT。
4.2.5.2.8.1.2 在试验开始前,VUT应以直线接近静止自行车目标至少2秒钟。
4.2.5.2.8.2 扩展测试:测试应证明系统没有不合理地改变响应静止自行车的控制策略。
4.2.5.2.8.2.1 测试应至少使用以下方式执行:
(a)自行车目标位于不同的偏移量位置,直到自行车目标位于VUT的行驶路径之外;
(b)面向不同方向的自行车目标;
(c)VUT的不同速度;
(d)面向VUT的自行车目标。
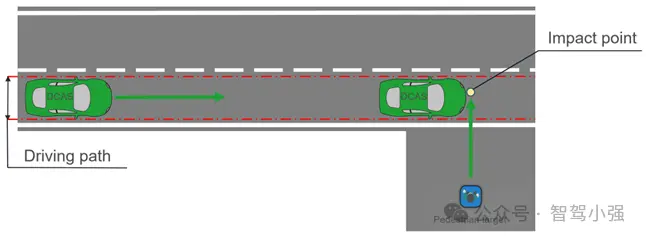
4.2.5.2.9 行人目标横穿VUT的路径CPNA
4.2.5.2.9.1 基础测试:测试应确认系统对横穿行人目标的声明的响应能力。
4.2.5.2.9.1.1 测试的功能部分应从以下开始:
(a)VUT在规定的公差和横向偏移范围内以所需的测试速度行驶,并且
(b)与碰撞点至少4秒的TTC距离。
4.2.5.2.9.1.2 在测试功能部分开始和系统干预之间,应遵守公差。
4.2.5.2.9.1.3 行人目标应以(5+0/-0.4)km/h的恒定速度在垂直于VUT行进方向的直线上运动(不得在试验功能部分开始之前开始运动)。行人目标的定位应与VUT协调,使行人目标在VUT前方的撞击点在VUT纵向中心线上,公差不超过0.2m。
 4.2.5.2.9.2 扩展测试:测试应证明系统没有不合理地改变响应横穿行人目标的控制策略。
4.2.5.2.9.2 扩展测试:测试应证明系统没有不合理地改变响应横穿行人目标的控制策略。
4.2.5.2.9.2.1 测试应至少使用以下方式执行:
(a)不同大小的行人目标;
(b)行人目标以不同但恒定的速度移动;
(c)行人目标路径与VUT路径的不同角度。
4.2.5.2.10 自行车目标横穿VUT的路径CBNA
4.2.5.2.10.1 基础测试:测试应确认系统对横穿自行车目标的声明的响应能力。
4.2.5.2.10.1.1 自行车目标应以(15+0/-1)km/h的恒定速度沿垂直于VUT行进方向的直线行驶(不得在测试功能部分开始之前开始运动)。
在测试功能部分之前的自行车目标加速阶段,自行车目标应被遮挡。自行车目标的定位应与VUT协调,以使VUT前面自行车目标的撞击点位于VUT的纵向中心线上,公差不超过0.2m。

4.2.5.2.10.2 扩展测试:测试应证明系统没有不合理地改变响应横穿自行车目标的控制策略。
4.2.5.2.10.2.1 测试应至少使用以下方式执行:
(a)自行车目标以不同但恒定的速度移动;
(b)自行车路径与VUT路径的不同角度;
(c)不同偏移量的碰撞点。
4.2.5.2.11 行人目标在交叉口进入VUT的路径CPTA
4.2.5.2.11.1 基础测试:测试应确认系统对于交叉路口的行人目标声明的响应能力。
4.2.5.2.11.1.1 测试的功能部分应从以下开始:
(a)VUT以要求的测试速度行驶,且在规定的横向偏移范围内,以及
(b)与碰撞点至少4秒的TTC距离。
4.2.5.2.11.1.3 在测试功能部分开始和系统干预之间,应遵守公差。
4.2.5.2.11.1.4 行人目标应以(5+0/-0.4)km/h的恒定度沿垂直于VUT行进方向的直线行驶,在试验的功能部分开始之前不开始运动。行人目标的定位应与VUT协调,使行人目标在VUT前面的撞击点位于VUT的纵向中心线上,公差不超过0.2m。
4.2.5.2.11.1.5 应根据下图,在行人目标与VUT的近侧平行移动的情况下执行测试运行。

4.2.5.2.11.2 扩展测试:测试应证明系统没有不合理地改变响应交叉路口行人目标的控制策略。行人目标应至少在道路两侧、远端近端四个场景下进行测试。
4.2.5.2.11.2.1 测试应至少使用以下方式执行:
(a)不同大小的行人目标;
(b)行人目标以不同但恒定的速度移动;
(c)行人目标在不同的碰撞点与车辆相撞或避开车辆;
(d)光照环境(例如夜间)的变化,视宣布的系统边界而定。
4.2.5.2.12 自行车目标在交叉口进入VUT的路径CBTA
4.2.5.2.12.1 基础测试:测试应确认系统对于交叉路口的自行车目标声明的响应能力。
4.2.5.2.12.1.1 自行车目标应以(15+0/-1)km/h的恒定度沿垂直于VUT行进方向的直线行驶,在试验的功能部分开始之前不开始运动。在测试功能部分之前的自行车目标加速阶段,自行车目标应被遮挡。自行车目标的定位应与VUT协调,使自行车目标在VUT前面的撞击点位于VUT的纵向中心线上,公差不超过0.2m。

4.2.5.2.12.2 扩展测试:测试应证明系统没有不合理地改变响应交叉路口自行车目标的控制策略。
4.2.5.2.12.2.1 测试应至少使用以下方式执行:
(a)自行车目标以不同但恒定的速度移动;
(b)自行车目标在不同的碰撞点与车辆相撞或避开车辆。
4.2.5.2.13 VUT在迎面而来的目标车辆的路径上转弯CCFtap
4.2.5.2.13.1 基础测试:测试应确认VUT在交叉路口转弯时系统对迎面而来车辆目标声明的响应能力。
4.2.5.2.13.1.1 VUT应沿初始直线接近撞击点,然后在交叉路口转弯。碰撞点穿过目标车辆(乘用车或摩托车)的前边缘,横向位置与VUT的宽度重叠50%。
4.2.5.2.13.1.2 目标车辆应以最高60km/h的速度(取决于申报的系统边界)接近。

4.2.5.2.13.2 扩展测试:测试应证明当VUT在交叉路口转弯时,系统没有不合理地改变响应对向车辆目标的控制策略。
4.2.5.2.13.2.1 测试应至少使用以下方式执行:
(a)不同类型或类别的目标车辆;
(b)不同的重叠率(碰撞点);
(c)两辆车的不同车道位置;
(d)目标车道(部分)遮挡/拥堵。
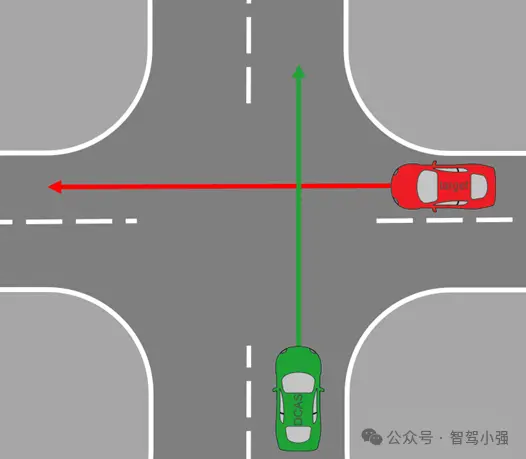
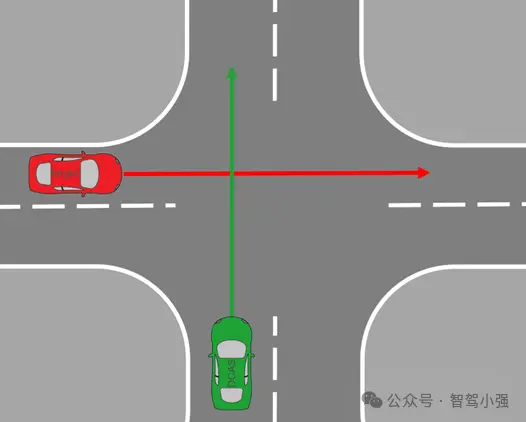
4.2.5.2.14 VUT在交叉口中穿过目标车辆的直线路径CCCscp
4.2.5.2.14.1 基础测试:测试应确认DCAS系统识别并为在十字路口直行的交叉目标车辆提供通行权的声明的响应能力。
4.2.5.2.14.1.1 VUT应与另一辆目标车(乘用车或摩托车)在从近侧或远侧方向相交的初始直线上接近碰撞点,碰撞点位于VUT前方中心,目标车辆侧方25%处。
4.2.5.2.14.1.2 目标车辆应以最高60km/h的速度(取决于宣布的系统边界)接近。预计VUT将提供通行权(测试车辆VUT行驶方向为绿灯)。
4.2.5.2.14.2 扩展测试:测试应证明系统没有不合理地改变响应交叉路口直行目标车辆的控制策略。
4.2.5.2.14.2.1 测试应至少使用以下方式执行:
(a)不同类型或类别的目标车辆;
(b)不同的重叠率(碰撞点);
(c)VUT和目标车辆的不同车道位置。
4.2.5.2.15 系统启动绕过车道障碍物的操纵[自动变道,新增]
4.2.5.2.15.1 基础测试:该测试应确认在系统启动的统过车道障碍物的机动过程中,系统对从相邻车道相反方向驶来的车辆的申报响应能力。
4.2.5.2.15.1.1 当另一辆车以恒定速度从相反方向驶近相邻车道时,VUT应在车道上以恒定速度直线行驶,然后通过绕过静态目标进入相邻车道。
4.2.5.2.15.1.2 移动目标应在相邻车道上以至少30 km/h的速度朝向VUT行驶。静态目标应放置在VUT前方、靠近道路边缘、重叠率为50%。VUT应至少以30km/h的速度直线行驶,VUT和移动车辆目标应同步,以同时到达静态目标。
4.2.5.2.15.1.3VUT应在系统启动操纵的情况下接近静态目标。VUT应避免与动态和静态目标碰撞。

4.2.5.2.15.2 扩展测试:测试应证明系统不会不合理地改变“系统启动的换道避障操纵”的控制策略。
4.2.5.2.15.2.1 至少应执行以下测试:
(a)不同类型或类别的目标车辆或其他道路使用者;
(b)不同的道路标记配置,包括没有中央车道标记的道路(宽车道);
(c)不同的道路几何形状(如弯道);
(d)VUT和静态目标之间的不同重叠率;
(e)VUT和移动目标的不同速度;(f)VUT和移动目标之间的不同同步时间(如,早和晚)。
4.3 公共道路验证
4.3.1 测试路线、时间和环境条件的位置和选择应由型式批准机构确定。公共道路验证应根据系统边界覆盖不同的时间和光照强度。
它们应包括系统预计将经历具有挑战性的场景(例如,小曲率半径弯道、由可变的基础设施和交通条件引起的速度变化(拥堵)、可变的前导车辆行为、可变的道路限速)和接近其声明的系统边界的极限(例如,能见度或道路条件的变化、系统边界的计划或突然结束)。
4.3.2 公共道路测试的持续时间应允许根据第5章和第6章中描述的规范的所有相关部分记录和评估系统运行情况,不包括安全关键和故障相关场景。
4.3.3 用于评估DCAS系统在驾驶员或系统启动的操纵中的行为的测试场景
4.3.3.1 公共道路验证应包括下表中的测试场景,以评估系统在正常真实运行条件下的行为。
测试路径的规划应包括根据本UN法规附件3(11章)中制造商声明相关的所有测试场景。
型式认证机构制定的测试计划应涵盖各种情况下评估特定能力的场景。
4.3.3.2 根据本UN法规附件3(11章)中制造商的声明,制造商应额外提供系统在任何相关类型场景中的行为证据(例如,基于仿真测试)
类别场景类型具体参考要求(非详尽列表)其他机动引导车辆选择车道(变道机动)6.3.1、6.3.9.4进入或退出环岛当此机动引导车辆离开其行驶车道(非变道机动)引导车辆转弯引导车辆离开或到达停放位置(停车位泊入、泊出)其他系统启动的机动引导车辆选择车道(变道机动)(保留)进入环岛或通过特定出口驶出环岛当此机动引导车辆离开其行驶车道(非变道机动)引导车辆转弯引导车辆离开或到达停放位置(停车位泊入、泊出)
4.3.4 对于制造商根据附件3声明的系统能力和系统边界在公开路测中无法遇到的任何其他相关类型的场景,制造商应提供内部系统验证的适当证据,以使型式认证机构满意。
4.3.5 如有必要,测试车辆应配备额外的非干扰设备,以记录公开道路验证过程中的数据。型式认证机构可记录或请求系统记录任何数据通道的日志,这是测试后评估所必需的。
4.3.6 建议在系统通过本章节中概述的所有试验场内测试,并完成附件3(11章)的安全审核后,再进行公共道路验证。



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
