




 广告
广告





















































数据驱动的动态系统(Dynamical System)建模(一):深度学习

动态系统建模被各领域广泛应用,例如电动汽车,能源系统,航空航天。我们本文提到动态系统主要是被控对象,对被控对象进行建模是因为我们希望了解这个系统(被控对象)的物理特性以及接受一些外部输入(力,扭矩,电流等等)时会有什么样的动态响应,基于此从而可以更好的给出控制输入得到我们期望的系统的输出,以及理解系统的退化或最大化提升系统效率。
这些动态系统的行为是由多物理场复杂的交互作用决定的,因此系统行为和系统响应建模通常需要复杂的第一原理支撑,仿真时也需要大量的计算(例如有限元模型)。
这也是本文的出发点,提供数据驱动(主要介绍深度学习和系统辨识)的模型降阶(Reduced Order Modeling)提速的方法,通过数据得到具有一定保真度的数据模型,在捕捉到系统动态特性的同时也提升仿真速度。
本文中将涉及多个 demo,数据以及脚本文件,若您感兴趣进一步获取这些链接,可以在文末填写反馈问卷,获取这些链接。
动态系统
动态系统包含状态空间 S, 时间集 T 和一个映射(规则)来描述状态随时间的演变规则 R:S×T→S。例如给定一个时刻 t 的状态 st ,通过这个规则可以计算后面一个或几个时刻状态 st+1=R(st),st+2=R(R(st)) 等等。动态系统通常可以用随时间变化的方程或方程组来描述。尤其对于连续时间系统,可以通过微分方程来表示。
我们先看一个简单的常微分系统(ODE), [链接1]

其中 y(t) 是系统状态。例如:一个简单二自由度线性系统,

其中 A 是一个 2x2 的矩阵。初始条件 x0 = [2; 0], 可以通过求解 ODE 方程得到的相应的二维输出 x(t),包含两个状态,时序和动态图如下:
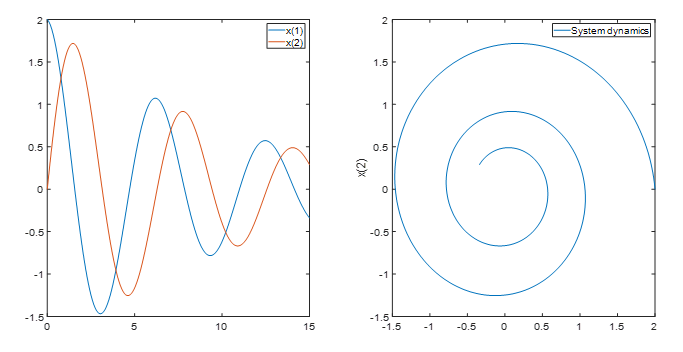
图表 1 系统输出x(t):
x0 = [2; 0];
A = [-0.1 -1; 1 -0.1];
trueModel = @(t,y) A*y; % 定义系统函数,此处就是一个状态空间方程
numTimeSteps = 2000;
T = 15;
odeOptions = odeset(RelTol=1.e-7);
t = linspace(0, T, numTimeSteps);
[~, xTrain] = ode45(trueModel, t, x0, odeOptions);
后面(在介绍 Neural ODE 部分)我们会尝试利用这个系统的数据 xTrain 进行深度学习模型的训练来得到这个系统的数据代理模型(Surrogate Model),这种思路也可以同样用于复杂系统。
既然数据驱动,有很多机器学习和深度学习算法可以用,那动态系统建模有什么特殊性呢,不是都适用吗?
目前工程中已经用到很多稳态(静态)模型。例如在发动机排放标定,通过 DoE 试验时我们会将发动机维持在不同的稳态工况(转速恒定,扭矩恒定等等),通过试验数据建模得到用于标定的稳态数据模型[链接2]。
稳态工况下,对于方程(1)这样一个简单系统,其中 y(t)' 可以看作 0,到达平衡点,于是 y(t) 和 u(t) 关系恒定,不再在时间维度上与历史状态 y(t-1),y(t-2) 等等有关,因此稳态模型针对稳态工况是非常准的。
而在瞬态工况下通常 y(t)' 非零,因此方程(1)在求解系统输出 y(t) 时不仅由当前时刻的输入 u(t) 决定,还取决于 y(t-1),y(t-2),u(t-1), u(t-2) 等等,这就是动态系统的特殊性,当前输出不仅依赖于当前的输入,还依赖于系统过去的行为(历史输入和历史输出)。我们在下一篇关于系统辨识的文章中会基于示例详细说明这一点。
不考虑动态系统,单纯从系统建模来说,通常有如下的两个方向:基于第一原理的和基于数据驱动的。
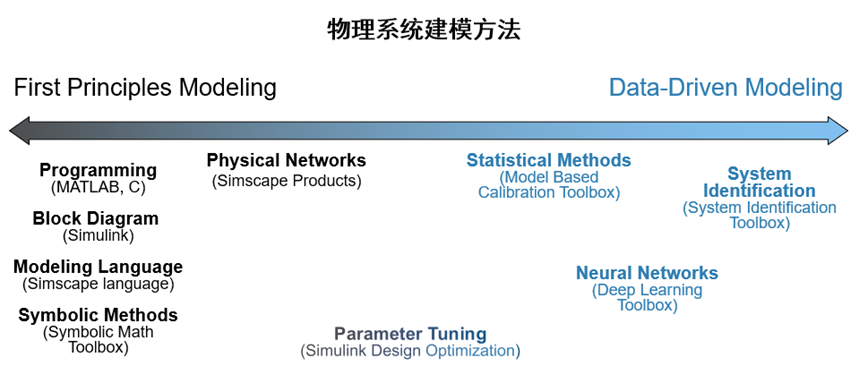
第一原理建模是领域工程师都比较熟悉的,例如可以使用 M 脚本语言,Simulink 或 Simscape 建模语言从物理原理进行系统模型的创建。
那什么情况下搭建系统会考虑使用或部分使用数据代理模型(Surrogate Model)?
-
物理系统原理比较复杂或者不够清晰,无法构建第一原理模型
-
数据获取相对简单
-
第一原理物理模型过于复杂,求解耗时,在控制开发时有时效要求,需要加速仿真计算
可以看到右半部分主要是基于数据驱动的建模手段,其中针对动态系统的建模主要是系统辨识和神经网络/深度学习。也是本系列两个方向。
本文介绍神经网络的几种用于动态系统建模的模型,下一篇文章会介绍系统辨识的几种模型。
前馈神经网络(Feedforward Neural Network)
前神经网络大家都不陌生,各神经元分层排列。如图2
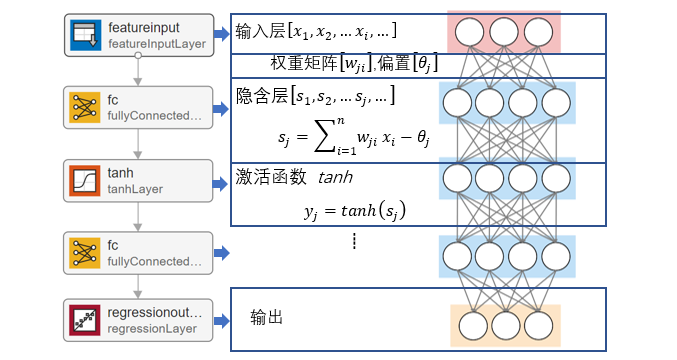
图2 简单前馈神经网络示意图
每层神经元只接受上层输出,结果只传给下一层,没有反馈。稍微复杂点的如图3。

图3 squeeze net MATLAB 示例
前馈神经网络是相对于循环神经网络(Recurrent Neural Network)而言,后者具有反馈,后面我们也会介绍。
那么问题来了,前馈神经网络因为没有反馈,如何表达动态系统(Dynamic System)的时间状态依赖呢?
通常主要手段使用不同尺度的滑动窗口来构建衍生特征从而表征系统在时间上的动态。
电池 SoC 预测示例
我们以电池管理系统为例,通过使用深度学习来估计电池的荷电状态 SoC(State of Charge)。
本示例主要介绍 SoC 数据驱动的建模方法,在即使不清楚电池电化学模型以及物理非线性特性的情况下,依然可以进行 SoC 估计。我们可以通过实验室中收集到的实测数据进行一个前馈神经网络代理模型训练实现 SoC 估计[1]。
脚本和数据[链接3]
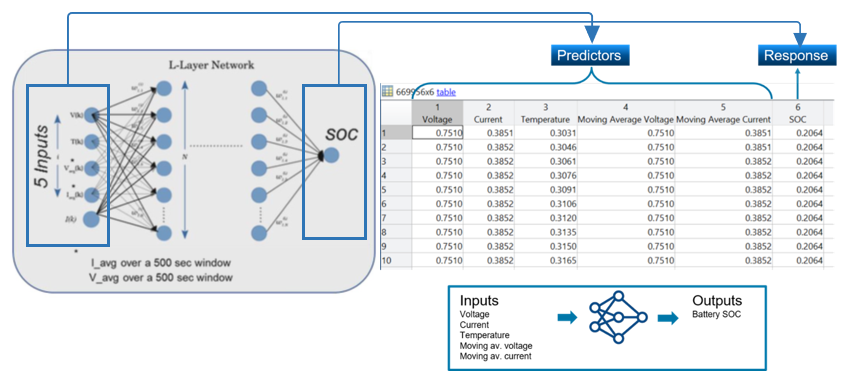
图表4 数据集预览和模型的5个输入1个输出
数据准备
我们利用实测数据通过预处理得到训练数据集 cdsTrain,我们看其中一条数据记录:
preview(cdsTrain)
ans = 1×2 cell array
{5×669956 double} {1×669956 double}
数据包含五个特征,分别是电压 V、电流 I、温度 T、滑动平均电压 V_avg、滑动平均电流 I _avg,其中后面两个衍生特征用于表征动态信息。
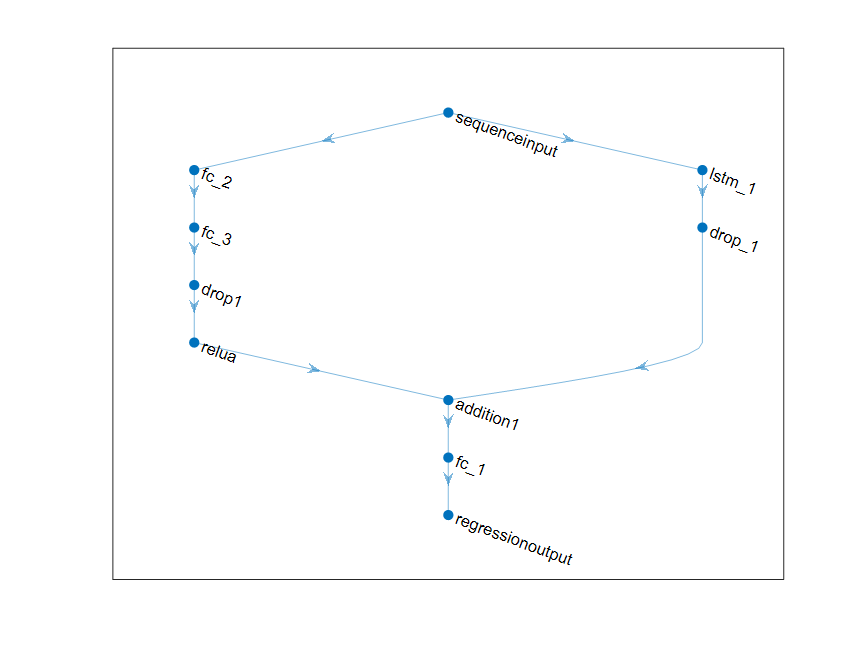
搭建模型
接下来我们构建神经网络模型,结构比较简单,三层全连接网络,一个输出的 Feedforward Neural Network模型。
layers =[sequenceInputLayer(numFeatures,"Normalization","zerocenter")
fullyConnectedLayer(numHiddenUnits)
tanhLayer % HyperbolicTangent
fullyConnectedLayer(numHiddenUnits)
leakyReluLayer(0.3) % 激活函数
fullyConnectedLayer(numResponses)
clippedReluLayer(1) % 激活函数
regressionLayer];
设置训练选项并训练
options =trainingOptions('adam', ... % Adam optimizer
'MaxEpochs',Epochs,...
'ExecutionEnvironment','cpu',...%可以选择GPU
'InitialLearnRate',InitialLearnRate, ...
'LearnRateSchedule','piecewise', ...
'LearnRateDropPeriod',LearnRateDropPeriod,...
'LearnRateDropFactor',LearnRateDropFactor,...
'ValidationData', {X,Y}, ...
'ValidationFrequency',validationFrequency,...
'MiniBatchSize',miniBatchSize, ...
'CheckpointPath', NET_Path);
图表 5 训练过程 Loss 变化
导入测试数据验证模型在测试集上的准确度
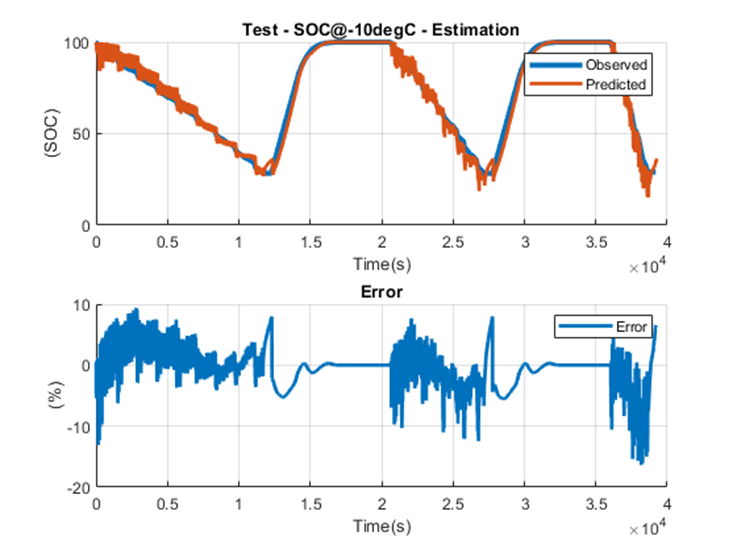
图表 6 深度学习模型的预测值与实测值比较
- 下一篇:电流测量方法大揭秘
- 上一篇:强域控、超感知的均胜电子智能驾驶域控平台



 广告
广告 



最新资讯
-
展会预告 | TCT亚洲展倒计时!思看科技五大
2026-03-10 20:50
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
