




 广告
广告





















































FAST-LIO2: 快速直接的激光雷达-惯性里程计
2021-09-12 21:53:49· 来源:同济智能汽车研究所

图10 翻转过程中FAST-LIO2构建的实际环境和3D地图
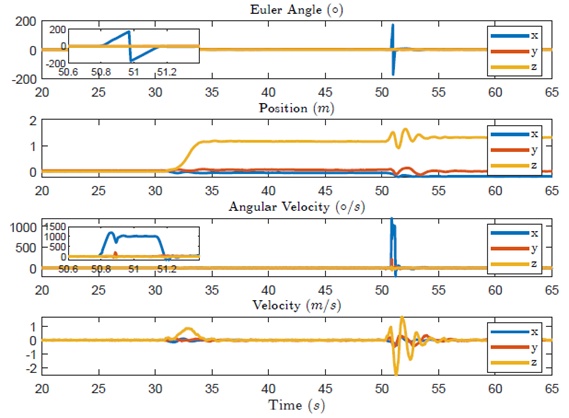
图11 无人机翻转实验中的姿态、位置、角速度和线速度。
3)快速运动手持实验:在这里,我们在具有大速度和角速度的富有挑战性的快速运动中测试FAST-LIO2。在人行天桥上来回冲刺时,传感器被握在手上(见图12)。图13显示了快速运动手持实验中的姿态、位置、角速度和线速度。可以看出,最大速度达到了7m/s,角速度在±100度/秒左右变化。为了展示FAST-LIO2的性能,实验在同一点开始和结束。本实验的端到端误差小于0.06m(见图13),而总轨迹长度为81m。
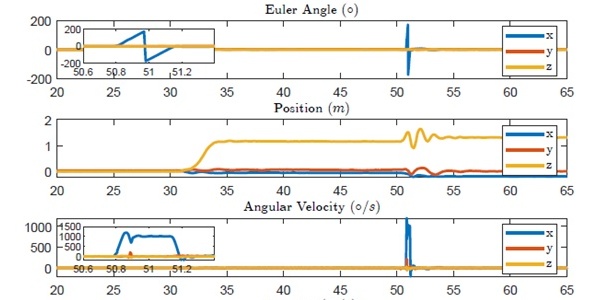
图12 FAST-LIO2在快速运动手持实验中的建图结果。
图13快速运动手持实验中的姿态、位置、角速度和线速度。
C. 户外飞行实验
3D激光雷达的一项重要应用是机载测绘。为了验证FAST-LIO2是否适用于这种可能的应用,我们进行了一次飞行实验。我们部署了一架携带我们激光雷达传感器的更大的无人机。该无人机配备GPS、IMU等飞行航电设备,可根据机载GPS/IMU导航进行航点自动跟踪。需要注意的是无人机配备的GPS和IMU仅用于无人机导航,不用于FAST-LIO2,其仅使用来自LiDAR传感器的数据。本实验中LiDAR扫描速率设置为10Hz。在香港南生围的香港湿地公园的多个地点进行了几次飞行。实时建图结果如图14所示。可以看出FAST-LIO2在这些植被环境中效果很好。可以清楚地看到树冠、道路上的车道标记和路缘石等许多精细结构。图14还显示了FAST-LIO2计算的飞行轨迹。我们将这些轨迹与无人机车载GPS/IMU导航估计的轨迹进行了视觉比较,它们显示出良好的一致性。由于技术上的困难,这里不提供GPS轨迹用于定量评估。最后,这三种环境每次扫描的平均处理时间分别为19.6ms、23.9ms和23.7ms。需要注意的是,LILI-OM在这三个数据序列中都失效了,因为在面向地面时提取的特征太少了。
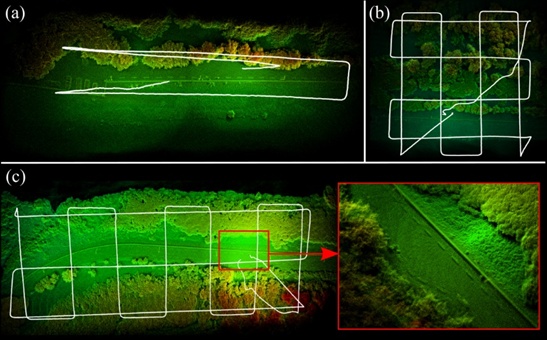
图14 使用FAST-LIO2进行机载建图的实时建图结果。数据是由无人机在香港湿地公园收集的,该无人机带有一个朝下的LivoxAvia激光雷达。飞行高度为30m(a)、30m(b)和50m(c)。
8 结论
本文构造了FAST-LIO2算法,这是一种直接且稳健的LIO框架,其速度明显快于当前最先进的LIO算法,同时在各种数据集上都体现了极大的竞争力或更好的准确性。速度的提高是由于去除了特征提取模块和进行高效的建图。我们开发并验证了一种新颖的增量k-d树(ikd-树)数据结构,它支持动态点插入、删除和并行重建。在开放数据集中的大量实验表明,所提出的ikd-树,对于在激光雷达里程计中的kNN搜索,可以在最新数据结构中实现最佳的整体性能。由于制图效率的提高,在快速运动和稀疏场景中的准确性和鲁棒性也通过在里程计中使用更多点而被提高。FAST-LIO2的另一个好处是,由于去除了特征提取,因此它自然适用于不同的LiDAR,而特征提取必须根据其各自的扫描模式和密度为不同的LiDAR精心设计。
致谢
本项目由大疆(200009538)资助支持。作者感谢大疆提供的资金支持和Livox科技在整个工作过程中提供的设备支持。作者要感谢Ambit-Geospatial在户外空中实验中的帮助。作者还感谢ZhengLiu、GuozhengLu和FangchengZhu的有益讨论。
附录
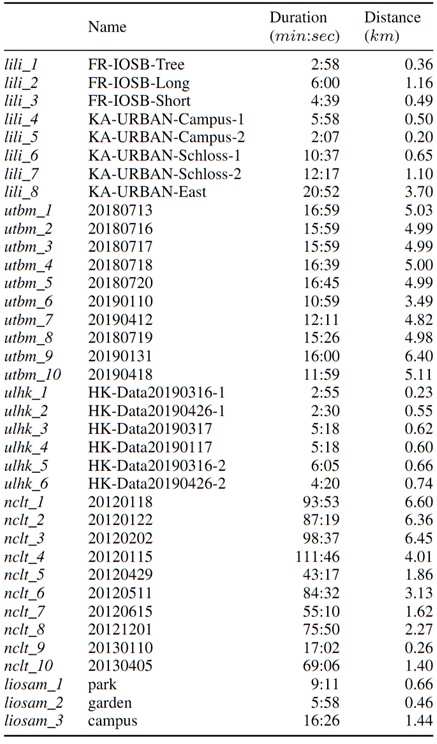
第VI部分中使用的所有37个序列的详细信息列于表8中。
表8 基准的所有序列的详细信息
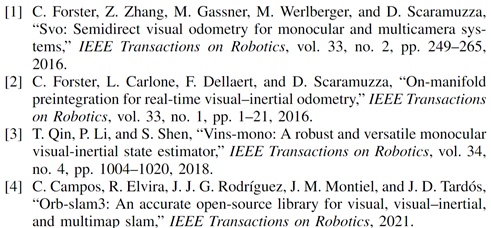
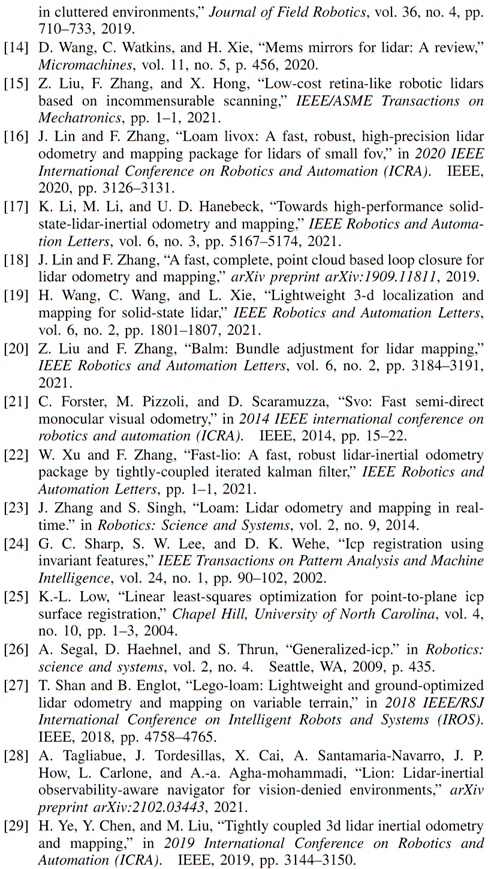
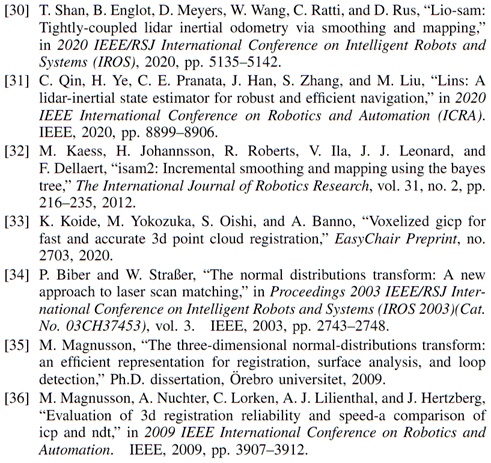
参考文献



 广告
广告 



最新资讯
-
用于赛车运动车辆动力学测量的光学传感器
2026-03-18 21:31
-
联合国法规R86对农林拖拉机灯光安装的工程
2026-03-18 12:20
-
联合国法规R78对L类车辆制动系统的工程化约
2026-03-18 12:16
-
联合国法规R77对机动车驻车灯静态可见性的
2026-03-18 12:16
-
TCT亚洲展启幕!思看科技人气爆棚,这些产
2026-03-17 19:17
