




 广告
广告





















































FAST-LIO2: 快速直接的激光雷达-惯性里程计
2021-09-12 21:53:49· 来源:同济智能汽车研究所

表4 有良好的地面实况序列的绝对平移误差
数据集utbm不产生LIO-SAM所需的姿态四元数数据,因此LIO-SAM不适用于所有序列在utbm数据集中,表示为—。
×表示系统完全失效
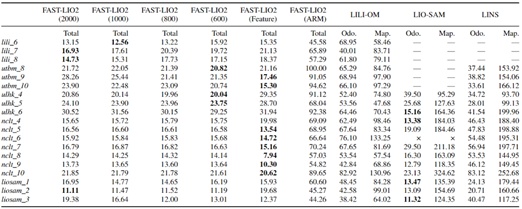
2)漂移基准:表5展示了端到端误差。总体趋势与RMSE基准结果相似。FAST-LIO2或其变体在总共7个序列中的5个序列中实现了最低的漂移。我们在https://youtu.be/2OvjGnxszf8上的视频中展示了ulhk_6序列的例子。应该注意的是,LILI-OM已经为他们自己的每个序列lili调整了参数,而FAST-LIO2的参数在所有序列中保持相同。LIO-SAM在其自己的序列liosam2和liosam3中表现出良好的性能,但无法在其他序列(如ulhk)上保持它。LINS在liosam和ulhk数据集上的表现比LIO-SAM差,在liosam2(来自[30]的花园序列)中失效,因为这两个序列是以很大的旋转速度记录的,而LINS使用的特征点太少。此外,在大多数序列中,基于特征的FAST-LIO表现类似于直接方法,除了序列lili_7,它包含许多树木和大的开放区域,而特征提取将从树木和远处建筑物中去除了许多的有效点。
表5 端到端误差(米)
由于LIO-SAM和LINS都是专为旋转激光雷达开发的,它们不适用于由固态激光雷达Livox Horizon记录的lili数据集。
表示系统完全失效。
D.处理时间评估
表6展示了具有不同配置的FAST-LIO2、LILI-OM、LIO-SAM和LINS在所有序列中的处理时间。FAST-LIO2是一个集成的里程计和建图架构,在每一步,地图都会在里程计更新后立即更新。因此,总时间(表6中的“总计”)包括里程计中发生的所有可能过程,包括特征提取(例如,对于基于特征的变体)、运动补偿、kNN搜索和状态估计,以及建图。需要注意的是,建图包括点插入、框式删除和树重新平衡。另一方面,LILI-OM、LIO-SAM和LINS都有单独的里程计(包括特征提取和粗略姿态估计)和建图(例如LILI-OM[17]中的后端融合、增量平滑和在LIO-SAM[30]中的建图以及在LINS[31]中的建图优化),在每次激光雷达扫描过程中它们的平均处理时间在表6中分别用“Odo”和“Map”表示。我们,将两次处理时间相加与FAST-LIO2进行比较。
从表6中,我们可以看到FAST-LIO2比其他LIO方法消耗的时间少得多,比LILI-OM快8倍,比LIO-SAM快10倍,比LINS快6倍。即使只考虑其他方法对里程计的处理时间,FAST-LIO2在除了四个序列之外的大多数序列中仍然更快。FAST-LIO2的整体处理时间,包括里程计和建图,几乎与LIO-SAM的里程计部分相同,比LILI-OM快3倍,比LINS快2倍以上。比较FAST-LIO2的不同变体,不同地图大小的处理时间非常相似,这意味着使用我们的ikd-树进行映射和kNN搜索对地图大小不敏感。此外,基于特征的变体和使用直接方法的FAST-LIO2的处理时间大致相似。尽管特征提取需要额外的处理时间来提取特征点,但它会为后续的kNN搜索和状态估计带来更少的点(因此时间更少)。另一方面,直接方法节省了点配准的特征提取时间。考虑到FAST-LIO2卓越的计算效率,我们在KhadasVIM3(ARM)嵌入式计算机上使用默认地图大小(1000m,参见VI-C)进一步实现了它。运行时结果表明,FAST-LIO2还可以实现10Hz的实时性能,这是任何之前的工作都没有在基于ARM的平台上实现过的。
表6 每个扫描基准的平均处理时间(以毫秒为单位)
7 真实场景实验
A.平台
除了对主要是在地面上收集到的数据集进行基准评估,我们也用由其他平台收集到的各种各样的富有挑战性的数据来测试我们的FAST-LIO2(如图6所示),这些平台包括用于开发无人机导航技术的280mm轴距四旋翼无人机,用于移动制图的手持平台以及用于航空测绘的GPS导航750mm轴距四旋翼无人机。280mm轴距四旋翼无人机被用于室内剧烈飞行试验,参见VII-B2部分,因此其激光雷达面向前方安装。由Ambit-Geospatial公司开发的750mm轴距四旋翼无人机用于空中扫描,参见VII-C部分,因此其激光雷达面向地面。在所有平台中,我们均采用固态3D激光雷达LivoxAvia,它具有内置IMU单元(型号BMI088),横向70.4°纵向77.2°的圆形视场,以及一种不同于之前在VI部分中使用的LivoxHorizon和Velodyne激光雷达那样的非常规的非重复扫描模式。由于FAST-LIO2并不需要提取特征,自然地它适合这种新型激光雷达。在以下所有实验中,FAST-LIO2使用默认配置(即地图大小为1000m的直接法)。除非另有说明,扫描速率均设置为100Hz,计算平台为之前部分中使用过的DJImanifold2-C。

图6.三种不同的平台:(a)280毫米轴距小型四旋翼无人机搭载前视LivoxAvia激光雷达,(b)手持平台,(c)750毫米轴距四旋翼无人机搭载下视LivoxAvia激光雷达。所有三个平台都搭载相同的DJIManifold-2C机载计算机。真实世界实验的视频可在https://youtu.be/2OvjGnxszf8获得。
B. 私有数据集
1)处理时间的详细评估:为了验证FAST-LIO2的实时性能,我们使用手持平台在大型室外-室内混合场景中以100Hz的扫描速率收集序列。传感器在前进约650m后返回起始位置。应该注意的是,LILI-OM也支持固态激光雷达,但它在此数据中效果不理想,因为其特征提取模块在100Hz扫描速率下产生的特征太少。FAST-LIO2实时构建的地图如图7所示,其漂移小(仅0.14m),与卫星地图吻合良好。

图7 大型场景实验
至于计算效率,我们将FAST-LIO2与其前身FAST-LIO[22]在Intel(Manifold2-C)计算机上比较。对于FAST-LIO2,我们还会在机载计算机上的ARM(KhadasVIM3)上进行测试。这两种方法的区别在于,FAST-LIO是一种基于特征的方法,它在每一步都会检索当前视场中的地图点,为kNN搜索构建一个新的静态k-d树。用于处理扫描的各个组件的详细时间消耗显示在表7中。预处理是指数据的接收和格式化,对于FAST-LIO和FAST-LIO2预处理是相同的,用时都低于0.1ms。FAST-LIO的特征提取每次扫描用时0.9ms,这是FAST-LIO2节省的。特征提取导致Fast-LIO比FAST-LIO2产生更少的点数(447对756),因此在状态估计上花费的时间更少(0.99毫秒对1.66毫秒)。因此,两种方法的总里程计时间非常接近(FAST-LIO为1.92毫秒,而FAST-LIO2为1.69毫秒)。这两种方法在制图模块呈现巨大差异,模块包括FAST-LIO的地图点检索和k-d树构建,以及FAST-LIO2的点插入和由于地图移动和树重新平衡而导致的框式删除。可以看出,FAST-LIO每次扫描的平均制图时间超过10毫秒,因此无法实时处理这个大场景。另一方面,FAST-LIO2的制图时间远低于采样周期。FAST-LIO2每次扫描处理756个点(包括里程计和制图)的总时间对于Intel处理器仅为1.82ms,对于ARM处理器为5.23ms。
表7 处理激光雷达扫描时各个组件的平均时间消耗(以毫秒为单位)

每次扫描的时间消耗和地图点数如图8所示。可以看出,在ARM处理器上运行的FAST-LIO2的处理时间偶尔超过采样周期10毫秒,但这种情况很少发生,平均处理时间远低于采样周期。偶尔的超时通常不会影响后续的控制器,因为IMU传播的状态估计可以在这个短时期内使用。在Intel处理器上,FAST-LIO2的处理时间始终低于采样周期。另一方面,由于地图点数量的增加,FAST-LIO的处理时间迅速增加到采样周期以上。注意到,即使面对大量地图点的情况下,FAST-LIO2的处理时间也显著减少。由于FAST-LIO仅保留其当前视场角内的地图点,如果LiDAR面对一个包含很少先前采样的地图点的新区域,该数字可能会下降。如上所述,即使地图点较少,FAST-LIO的处理时间仍然要长得多。此外,由于FAST-LIO在每一步构建一个新的k-d树,构建时间的时间复杂度为O(nlogn)[40],其中n是当前视场中的地图点数。这就是FAST-LIO的处理时间几乎与地图大小呈线性相关的原因。相比之下,我们ikd-树的增量更新具有O(logn)的时间复杂度,导致处理时间的增长相对于地图大小的增加要慢得多。

图8 FAST-LIO和FAST-LIO2每次LiDAR扫描的处理时间。
2)无人机剧烈飞行实验:为了展示FAST-LIO2在移动机器人平台中的应用,我们部署了一个携带LivoxAVIA激光雷达传感器的小型四旋翼无人机,并进行了如图9所示的激烈翻转实验。本次实验中,无人机先从地面起飞,在1.2m高度悬停一段时间,然后进行快速翻转,然后在从FAST-LIO2获取状态反馈的流形模型预测控制器[62]的控制下返回悬停飞行。FAST-LIO2估计的姿态如图9(d)所示,与实际的无人机姿态非常吻合。环境的实时建图如图10所示。另外,图11显示了实验过程中的位置、姿态、角速度和线速度。翻转期间的平均和最大角速度分别达到912度/秒和1198度/秒(从50.8秒到51.2秒)。FAST-LIO2平均每次扫描仅需2.01ms,足以满足控制器的实时性要求。通过提供高精度里程计和100Hz的高分辨率环境3D地图,FAST-LIO2非常适合机器人的实时控制和避障。例如,我们之前的工作[63]展示了FAST-LIO2在自主无人机上的应用,可在复杂的室内和室外环境中躲避动态小物体(低至9毫米)。
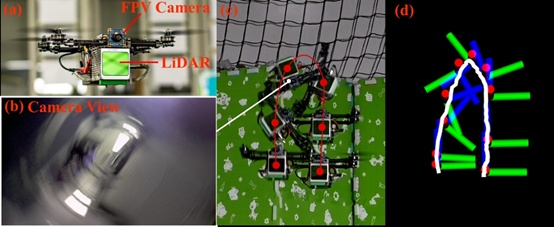
图9 翻转实验。(a)小型无人机;(b)在翻转期间显示第一人称视角图像的车载摄像头;(c)无人机翻转过程中的第三人称视角图像;(d)使用FAST-LIO2估计的无人机姿态。




 广告
广告 



最新资讯
-
用于赛车运动车辆动力学测量的光学传感器
2026-03-18 21:31
-
联合国法规R86对农林拖拉机灯光安装的工程
2026-03-18 12:20
-
联合国法规R78对L类车辆制动系统的工程化约
2026-03-18 12:16
-
联合国法规R77对机动车驻车灯静态可见性的
2026-03-18 12:16
-
TCT亚洲展启幕!思看科技人气爆棚,这些产
2026-03-17 19:17
