




 广告
广告





















































激光雷达系统如何提升自动驾驶的安全性

长期以来,自动驾驶汽车一直是科幻小说中的常见元素。然而,不同于科幻小说作家所构想的其他发明,全自动驾驶汽车在过去十年间已经出人意料地接近现实。在这篇文章中,您将了解如何使用 COMSOL Multiphysics® 软件模拟激光雷达系统,该系统是实现自动驾驶汽车和自主机器人感知周围环境的关键技术。
迈向全自动驾驶汽车之路
评估汽车自动驾驶级别的行业标准由美国汽车工程师学会(SAE)制定。该标准将自动化分为6个等级(从 0 级开始),其划分依据是哪些动态驾驶任务(DDT)可由机器执行,哪些任务需要人类参与:
0 级: 无自动驾驶;人类驾驶员执行车辆的所有动态驾驶任务
1 级: 自动辅助转向,或自动辅助加速和减速(如巡航控制);人类驾驶员执行车辆的其他所有动态驾驶任务
2 级:自动辅助转向、加速和减速(如自动平行泊车);人类驾驶员执行其他所有动态驾驶任务
3 级: 自动执行动态驾驶任务;人类驾驶员密切监控车辆,必要时进行干预
4 级: 自动执行动态驾驶任务;人类驾驶员无需干预
5 级: 完全自动化的动态驾驶任务;人类驾驶员无需坐在前排座椅上
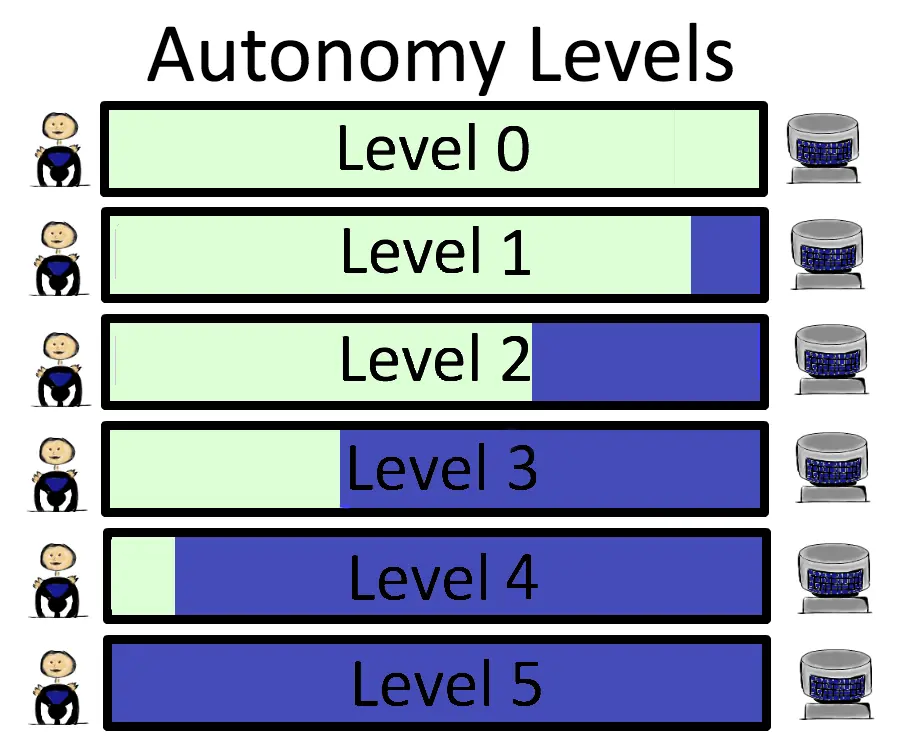
插图显示了 SAE 所描述的自动驾驶级别的 6 个等级。
该分级体系在 2 级和 3 级之间存在一个重要转变,即车辆的主要控制权从人类驾驶员转移到自动驾驶系统,由自动驾驶系统负责大部分动态驾驶任务。迄今为止,一些自动驾驶汽车已达到 SAE 4 级,但还没有达到 5 级的全自动驾驶级别。
一幅描述 5 级自动驾驶体验的漫画。
在全自动驾驶体验成为现实之前,仍存在一些困难需要解决。在自动驾驶领域,一个重要的设计挑战是优化 激光探测和测距(激光雷达)系统。激光雷达的工作原理与声呐和雷达类似,但它是基于光而不是声波或无线电波。借助激光雷达技术,自动驾驶汽车和其他自动机器人能够对周围环境进行三维感知。激光雷达还被广泛应用于考古和林业等需要勘测地形的行业。
激光雷达的工作原理
激光雷达的工作原理非常简单:向特定方向发射一束高强度窄光束;测量反向散射光返回靠近光源的接收器所需的时间(称为飞行时间);根据飞行时间计算到散射表面的距离。对一系列不同角度的光束重复这一过程并整合数据。最终得到周围环境的图像,只不过这里每个像素量化的是深度,而不是典型图像中的颜色。
仅需一个简单的公式,即可将飞行时间 转换为距离 。假设光在恒定折射率 的介质中传播,我们可以得到:

其中, 为真空中的光速。在下面的应用中,我们考虑的是空气中的激光雷达,因此设置
为真空中的光速。在下面的应用中,我们考虑的是空气中的激光雷达,因此设置  。
。

安装在车顶的激光雷达装置示例。图片由 Arno Mikkor 提供自己的作品。采用 CC BY 2.0 许可,通过 Flickr Creative Commons 共享。
要使激光雷达系统发挥作用,还需要考虑一些实际问题:
脉冲激光是首选的光源,它能以窄光束进行快速扫描,但必须注意用眼安全;通常选择波长在 1550 nm 左右的激光,因为即使直接照射眼睛也不会对其造成伤害。
为了便于精确扫描,光束角度必须加以精确控制。例如,可以通过使用 MEMS 透镜来实现这一点。
由于光子能量较低,波长较长的护眼光难以有效检测。常见的选择是前置放大雪崩二极管或 PIN 光电二极管。
从本质上讲,激光雷达的工作原理与雷达和声呐类似,但与这两种较为成熟的技术相比,激光雷达具备一些关键优势。例如,激光雷达使用的光波长(通常约为 1550 nm)比雷达使用的无线电波或声呐使用的声波短得多,因此分辨率更高。此外,光在空气中的衰减远大小于声波,故激光雷达的探测距离更远。声呐一般只在水下使用,因为其在水下的衰减程度相对较弱。最后,光在空气中的传播对温度和压力变化的敏感度远低于声速,因此使用激光雷达测得的距离比声呐更准确。
激光雷达也需要考虑一些局限性。与雷达和声呐不同,激光雷达无法利用多普勒效应来获取物体的速度信息,因此需要足够高的刷新率才能通过距离变化率来推断速度。此外,透明和镜面类表面不能产生大量反向散射光,因此难以被激光雷达探测到。
使用射线光学模块模拟激光雷达
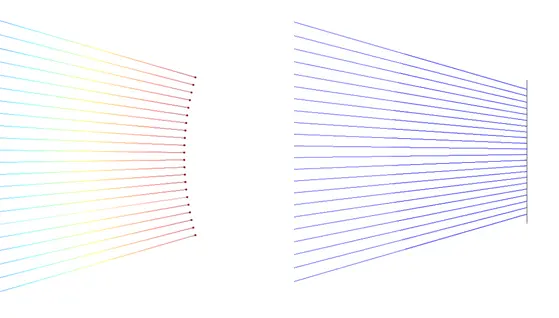
COMSOL Multiphysics® 中的时域射线追踪算法非常适合模拟激光雷达。相较于传统几何光线追踪方法,借助该算法可获取每条光线的实际到达时间,从而实现更准确的激光雷达模拟。如下图所示。有关光线光学模块的详细信息,请查看这篇文章。接下来,让我们来看看激光雷达的两个示例模型:检测十字路口障碍物的汽车和绘制房间布局图的扫地机器人。在这两个示例模型中,激光雷达单元均被作为成对的释放特征(光源)和累加器(探测器)来实现。
COMSOL Multiphysics®(左)中瞬态射线追踪与标准顺序平面到平面射线追踪(右)的差异描述。
用激光雷达探测障碍物
该模型由一辆装有激光雷达单元的汽车组成,用于在十字路口探测行人和另一辆汽车。射线轨迹动画和三个前端探测器瞬态信号图如下所示。需要注意的是,此处只考虑了一个探测周期,而在实际场景中,这一过程每秒会重复多次。
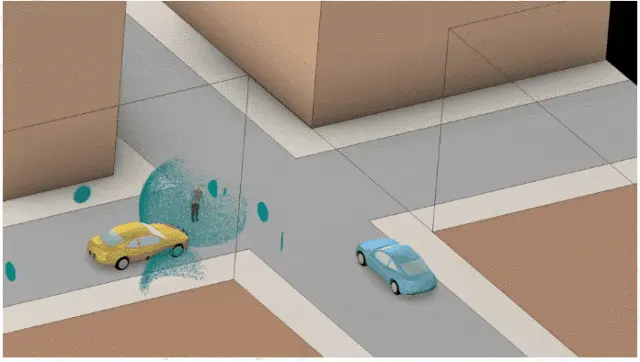
汽车激光雷达模型的射线追踪结果动画。
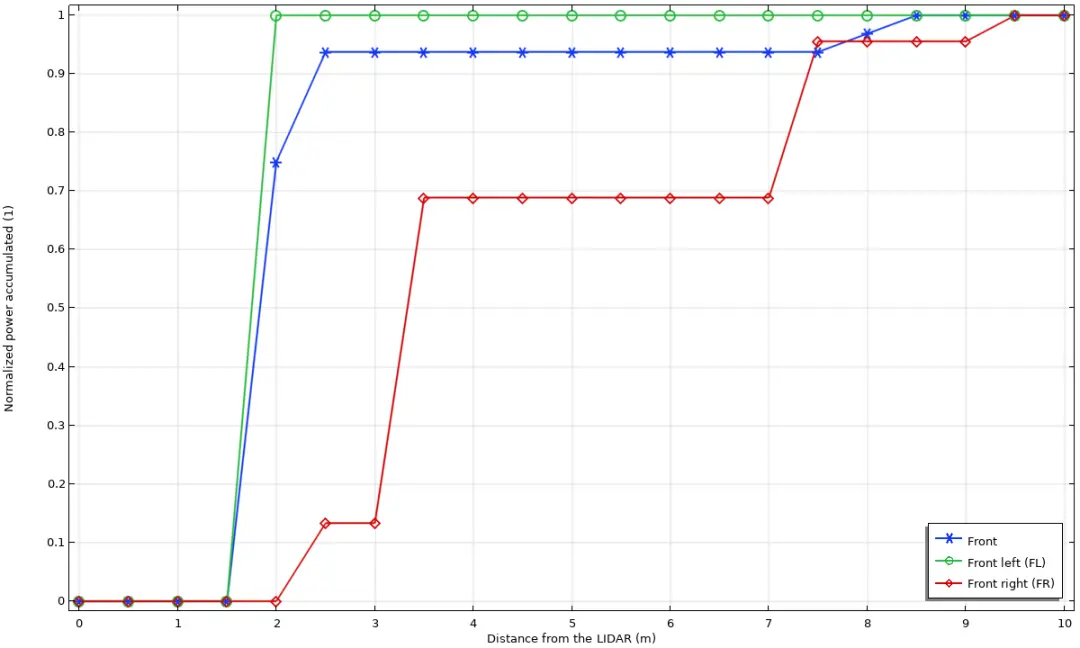
绘图显示了前方三个探测器探测到的信号。前方和左前方探测器在 2 m 处达到峰值,探测到行人。右前方探测器在 7.5 m 处达到峰值,探测到另一辆汽车。
使用激光雷达扫描房间
第二个示例模型显示了一台扫地机器人通过旋转激光雷达装置扫描房间的情况。从下图中可以看到,通过绘制飞行时间与旋转角度的关系图,可以复原出房间的布局。

显示出射线轨迹激光雷达角度扫描动画。
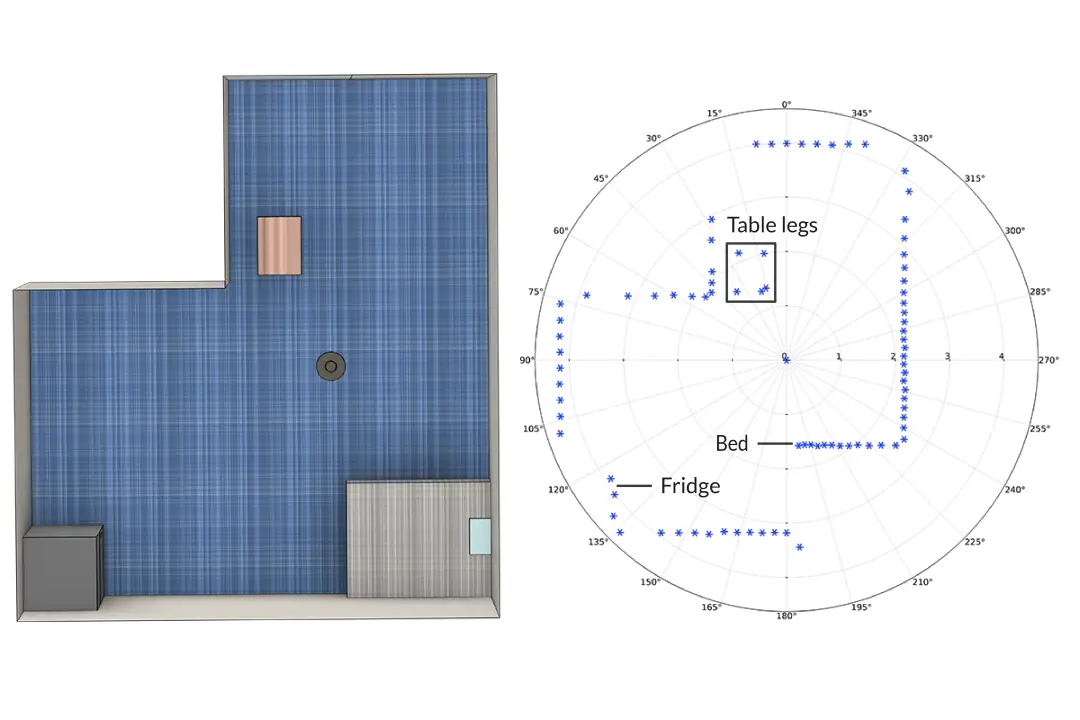
房间布局(左)与飞行时间(距离)和激光雷达装置角度(右)关系的对比。



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
