




 广告
广告





















































基于数据拟合的线控转向手感模拟方法

由于转向系统结构的解耦,SBW中路面阻力不能传递给驾驶员,需要靠路感电机模拟产生转向阻力,而这个特点也为路感设计创造了灵活的方式。比如可以在汽车上设置几档不同大小的路感,来满足各种驾驶人群对的偏好,让方向盘感觉舒适的同时也能清晰反映路面情况。
路感指汽车行驶中驾驶员通过方向盘得到的转向阻力矩,该阻力矩主要包含两部分:回正力矩和摩擦力矩。其中,回正力矩是保持车辆正常行驶的力矩,该数值的确定是汽车设计中的一个难题,通常由经验、半经验、统计或实验的方法获得。回正力矩与前轮的受力状态存在直接关系,而前轮受力又和汽车状态、路面情况直接相关,因此,通常把总的回正力矩除以总的力传动比看成是路感。除回正力矩以外,司机还要求能够感受到转向过程中的阻力距。理论上讲,摩擦阻力距越小,获得的路感会越清晰。但是,摩擦阻力距过小,可能会导致系统的逆效率过高,当汽车行驶在颠簸的路面上时就可能会造成冲击,导致驾驶手感变差。因此,设计转向系统时通常会保留一部分阻力,减少路面冲击对驾驶员的影响。路感理论上可以采用在齿轮齿条上安装传感器的方法直接测量获得,但是,这种方法一来安装不太方便、成本比较高,二来采到的数据噪声较多,需要经过滤波才能使用,很少采用。
基于动力学模型的方法通过参考传统车辆路感产生的动力学原理建立相关的动力学模型,根据车辆的动态响应、驾驶员的方向盘输入等计算与路感相关的轮胎力、摩擦力矩等,最终计算出路感。转向阻力矩主要来源是轮胎与地面的接触,因此轮胎模型的准确性对转向系来说至关重要。动力学计算方法设计的路感与传统车辆更加接近,适应性较强,但存在着车轮定位参数难以获得的问题,需要通过各种算法来克服。
基于数据拟合的方法通常是将路感设计为一些车辆行驶参数的函数关系式,在不同条件下为驾驶员提供不同的路感,简单高效,但是自适应性和精度较差。不同的研究人员,考虑到力矩产生的因素不同,提出的表达式也不尽相同。一种常见的研究方法是将路感分为主反馈力矩、摩擦力矩、阻尼力矩、惯性力矩和回正力矩等几个部分,每个部分用一个特定函数进行经验拟合计算,各部分汇总后综合得到模拟路感。
比较简单的是通过实车进行反馈电流曲线的标定,标定曲线如图6.22所示。在不同车速下分别标定一组曲线,可以在不同车速下向驾驶员反馈适当的路感,可据实际需求增加标定点,或者采用模糊控制等方法来加强其适应性。
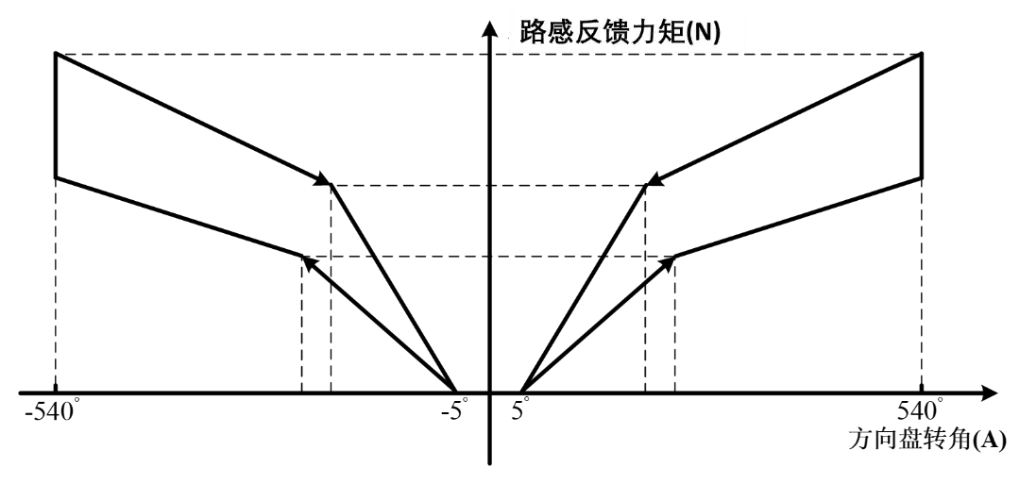
图1 路感反馈标定曲线
普遍认为方向盘转角、车速以及侧向加速度对方向盘力矩的影响最大。因此,引入路感反馈力矩的概念,将车辆行驶分为低速、高速状态,分别拟合后再进行归一化处理,再添加回正、阻尼、限位等辅助措施,从而得到完整的路感。公式如下:

其中:TD是方向盘手力,Tf为反馈力矩,Tfric为摩擦力矩,Tdamp为阻尼控制力矩,Tar为主动回正力矩,Trep为末端限位控制力矩,Tinteria为惯性补偿力矩。
1.反馈力矩
方向盘转角、车速和侧向加速度对反馈力矩影响最大。
(1)当汽车低速行驶时,侧向加速度变化率较小,驾驶员感知侧向加速度的变化比较模糊,对方向盘转角输入变化的感知比较清晰,因此低车速段重点关注方向盘转角和车速的影响。
(2)当汽车高速行驶时,一般进行小角度转向操作,汽车回正力矩比较小,传统车辆上一般对这种工况的力矩进行补偿来保证一定的路感,因为“中心转向区”是车辆正常操控区间,高速情况下如果路感不明显,会阻碍驾驶员对车辆行驶状态的判断,即司机所说的“发飘”情况。较小的方向盘角度变化也会导致车辆侧向加速度的较大变化,驾驶员对侧向加速度变化引起的路感感知比较敏感。因此高速段需考虑侧向加速度和车速变化的影响,根据司机感到舒适的“中心区域”路感来调整参数。
(3)当汽车在低速与高速之间行驶时,驾驶员对方向盘转角、侧向加速度和车速变化引起的反馈力矩变化均有一定的感知。
(4)当方向盘转角很小时,为了模拟真实情况,并且方便驾驶员找到方向盘中心位置,可以设计一段空行程,直接用转向机械部件的摩擦、惯量和阻尼产生的力作为路感。
(5)驾驶员在正常驾驶中会控制方向盘在关于零点对称的一个范围内,该转动范围称为“中心转向区”。在中心区附近采用较大的斜率,来获得一定的路感力矩,在方向盘转角进一步增大时减小路感力矩的增长斜率,直到成为一条水平直线,这样就能够减轻方向盘转角很大时的驾驶员操纵负荷。
综上,可以考虑采用权重函数覆盖不同的工况,保证汽车不同车速间的反馈力矩的连续、平滑和舒适。
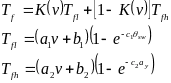
其中:Tfl表示低速时的反馈力矩;Tfh表示高速时的反馈力矩;v为车速;θsw为方向盘转角;ay为侧向加速度;系数a1、a2、b1、b2、c1、c2均为大于0的常数,可根据驾驶员的偏好进行调节以获取不同的转向手感;K(v)是高速路感和低速路感的加权函数。
加权函数K(v)设计为:速度较低时Tfl是主要部分,车速较高时Tfh是主要影响部分。因此,K(v)可采用分段三次函数,通过参数匹配满足了路感的平滑、连续变化。
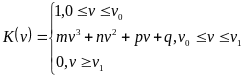
其中,v0和v1是低速和高速的分段点。
考虑到手感的连续、一阶导数连续,要求:

即
求得
在数据拟合法中,最终的目标是实现一种让驾驶员感觉舒适的路感,而不是完全模拟有机械连接的车辆转向路感,所以在低速和高速情况下只考虑了较少的因素,可以看出与实际车辆还是有一定差别的,这种方法可以根据驾驶员的手感进行灵活调整,但同时也是它的缺点—适应性差,缺乏严谨的评价指标,不同人的主观评价也有一定的差异。因此,需要综合考虑不同的因素对其进行修正以获得良好的手感。
2.摩擦力矩
在SBW系统中,摩擦力矩作为其固有特性不可忽略,具有特别重要的意义。转向系统摩擦会影响车辆的行驶性能和转向性能,同时也会影响人的主观转向感觉。齿轮齿条转向器由于其结构特点决定了其为最主要的摩擦部件,齿条相对于支撑件以及密封件的相对运动产生摩擦。在电动助力转向系统中,旋转的机械部件相对于液压助力转向系统会产生更大的系统摩擦。转向器摩擦根据其方式和大小不同而起着正面和负面作用。
(1)负面影响
一般来说,在人机工程操作机构中,大的库仑摩擦会降低人的操作舒适性。显然,摩擦会让微小的转向运动变得困难,尤其是在中位附近液压伺服助力或者电动伺服助力较小时。由于系统摩擦太大,从中位开始转向(从静摩擦过渡到动摩擦)变得突,或者有转向黏着感大的摩擦会让车辆方向盘在车速较低的弯道结束后不能自动回到中位。大的摩擦还会影响转向系统的反馈性能。车辆行驶信息和路面信息,这些有用的信息反馈也会因为摩擦而变弱。
(2)正面影响
转向器摩擦导致方向盘力矩相对于转向角形成了迟滞特性。这种迟滞特性对于精确的弯道行驶来说是必不可少的。在半径一定的固定弯道中行驶时,方向盘转角对应一个工作点,如果离开这个工作点,增大转向角会感觉到方向盘力矩的增加,减小转向角回打方向盘会明显感觉到方向盘力矩在减小,这样的感觉可以让驾驶人保持固定的工作点,即方向盘精确的角度位置成为可能。大的转向器摩擦当然也能抑制干扰信息的反馈传递。冲击和周期性的激励,例如车轮不平衡、制动力波动等,会因为摩擦而衰减。方向盘的抖动会由于摩擦的存在而减小。
驾驶员能够感受到的摩擦力矩仅来源于方向盘总成,采用双曲正切函数来拟合摩擦力矩,该模型在方向盘角速度为零附近仍能够很好地描述方向盘总成的摩擦力矩。公式如下:

式中:Cf为摩擦系数, 为曲线上升系数,用于调节曲线上升的快慢使系统更加稳定。
为曲线上升系数,用于调节曲线上升的快慢使系统更加稳定。 为方向盘角速度。tanh函数是为了避免力矩突变,保证手感连续丝滑。
为方向盘角速度。tanh函数是为了避免力矩突变,保证手感连续丝滑。
3.阻尼力矩
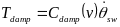
为了消除高速行驶时快速转动方向盘引起的失稳现象,并有效避免撒手回正时的超调和抖动现象,增加一定的阻尼控制力矩。阻尼控制力矩的大小与方向盘角速度成比例关系,角速度越大则阻尼控制力矩越大。并且阻尼控制力矩的大小应随着车速的增大而增大。公式如下:
其中,Cdamp为阻尼控制力矩调节系数,与车速有关,可以其进行调节来改变阻尼控制力矩的大小。
4.主动回正力矩
传统动力转向系统的车辆,方向盘会在转向轮主销几何参数等作用实现主动回正,从而保证车辆的直线行驶性能。SBW系统由于取消了机械连接,无法实现主动回正,因此有必要进行主动回正控制,保证驾驶员撒手后能够使方向盘主动回到零位。
主动回正力矩是由车速、转角以及方向盘角速度的函数组成,公式如下:

5.末端限位力矩
SBW系统由于取消了传统转向机构的机械连接,方向盘可以任意无限制地转动,这种现象与汽车转向系统的设计相违背。限位方式通常有两种。一种是凭借硬件结构进行限位,在方向盘上加装机械限位装置,将方向盘限制在一定转角范围内。另一种是利用软件算法进行限位。采用硬件结构进行机械限位的方式不但增加了系统的成本,而且会使方向盘的结构变得复杂。软件限位公式如下:
式中:Klim为末端限位控制力矩系数,固定比例或车速的函数。 为末端限位起始角度,
为末端限位起始角度, 为末端限位终止角度,
为末端限位终止角度, 为末端限位角度行程。
为末端限位角度行程。
6.惯性力矩
SBW系统的惯性力矩公式如下:

式中, 为方向盘的角加速度,Jh为方向盘模块的转动惯量,Tinteria为方向盘模块的惯性力矩。
为方向盘的角加速度,Jh为方向盘模块的转动惯量,Tinteria为方向盘模块的惯性力矩。



 广告
广告 



最新资讯
-
招商车研助力长安汽车在重庆获批L4级自研Ro
2026-04-01 09:48
-
是德科技推出面向高校的半导体实践教学实验
2026-04-01 09:03
-
全新HexaRev运动平台+HyperDock座舱技术,
2026-03-31 17:05
-
FOCAL发布第二代SLATEFIBER系列,解锁旅途
2026-03-31 16:57
-
海外媒体走进重庆 探访中国汽车产业“出海
2026-03-31 14:15
