




 广告
广告





















































狭窄环境下牵引车-挂车系统基于环境和行为的搜索轨迹规划方法
2024-09-12 07:58:43· 来源:同济智能汽车研究所

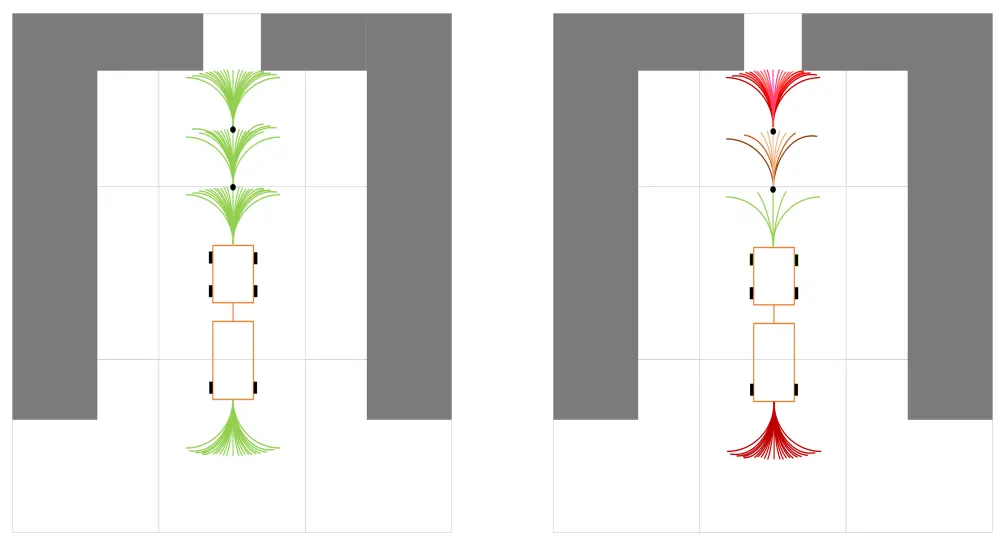
图6. MHA(左)与HA-JPS(右)非凸避障比较
C. 完备性表现
有人可能会担心,我们是否通过进一步牺牲算法的完整性来加快求解速度。然而,在模拟过程中发现了一个有趣的情况:当拖车长度从5 m扩大到5.4 m ()时,MHA倾向于反向搜索,无法规划轨迹,而我们的方法成功推导出可行的轨迹,如图7所示。
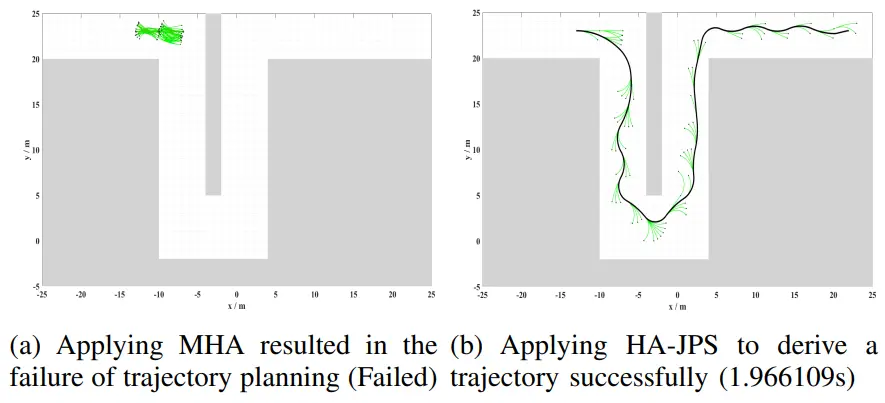
图7. MHA(左)和HA-JPS(右)算法完备性比较。
从理论上讲,我们的修改并没有涉及到算法完备性的提高。一种可能的解释是,MHA更注重寻找一个“最优”的解决方案,而不是一个“可行”的解决方案,导致在特定情况下更多的反向搜索,最终失败。假设混合A*是一个概率完备规划器,这种情况表明HA-JPS并没有进一步降低其完备性。
5 总结
本文提出了一种改进的基于搜索的TTS运动规划方法。该方法同时考虑了求解效率、轨迹可行性和完备性。深入考虑了TTS的工作环境和行为特点,并进行了一些修改,使其进一步适用于TTS的运动规划。为防止规划任务中不必要的倒车,设计了成本相对较高的倒车代价。并且优先扩展与当前TTS状态方向角度相同的方向。此外,为了提高开放环境下的搜索速度和保证狭窄环境下的搜索精度,采用了可变采样间隔。
虽然该方法在求解速度上有明显提高,但在一定程度上牺牲了轨迹质量。因此,未来的工作是将基于优化的规划器集成到当前的算法中,以弥补最优性和实时性能之间的差距。
参考文献
- 下一篇:直播|燃料电池发动机测试评价技术
- 上一篇:芯片开发与整车开发的协同适应策略探讨



 广告
广告 



最新资讯
-
智能底盘如何重构极限驾驶边界:定义与性能
2026-03-24 17:01
-
选择合适的扭矩传感器 - 实现更高性能选型
2026-03-24 13:02
-
东扬精测参展第七届宁德国际新能源电池技术
2026-03-24 10:52
-
东扬精测参展重庆国际显示技术展览会(ICDT
2026-03-24 10:51
-
国内首个“路空一体”国家级测试基地!南方
2026-03-23 17:23
