




 广告
广告





















































联合国自动驾驶法规R157对L3级自动驾驶ALKS的要求⑤

1.背景
2.R157各名词定义
3.系统安全和故障安全响应要求
4.人机交互界面信息要求
5.障碍物和事件感知与响应要求
6.数据存储系统要求
7.网络安全和软件更新要求
8.交通干扰关键场景指南
9.ALKS功能和操作安全的特殊要求
10.试验场内测试规范
11.公共道路测试规范
4.4 驾驶员信息
4.4.1
应向驾驶员说明以下信息:
(a)第4.4.2段所界定的系统状态。
(b)任何影响ALKS系统满足本法规能力的故障应至少发出光学报警,除非ALKS系统被停用(关闭模式)
(c)接管请求时至少要有光学和声学或触觉报警信号。最晚在接管请求开始后4s,
(i)系统要发出持续或间歇性的触觉报警,除非车辆处于静止状态;和
(ii)升级报警并保持升级报警,直到接管请求结束。
(d)进行最小风险操作MRM时至少要有一个光学和另外一个声学或触觉报警信号。
(e)紧急机动时至少有一个光学报警信号。
(f)如果ALKS能够执行LCP,LCP时至少有一个光学报警信号。
上面的光学信号应具有足够的大小和对比度,声学信号应响亮清晰。

4.4.2 系统状态
ALKS系统不可用时状态指示:如果由于ALKS系统不可用,系统拒绝在驾驶员有意操作后激活系统,则应至少以视觉方式向驾驶员显示。
ALKS系统激活时状态指示:ALKS系统激活后,系统状态(激活模式)应通过专用光学信号向驾驶员显示。光信号应包含明确的指示,包括:
(a)方向盘或车辆,带有额外的“A”或“AUTO”,或符合UN ECE R121法规的标准符号;
(b)位于车辆前方驾驶员直接视野附近的易于察觉的指示,例如仪表盘或方向盘上的显著指示。
表示ALKS系统的激活状态的光学信号应始终显示,直到ALKS系统停用(关闭模式)。
当ALKS系统正常运行时,光学信号应保持恒定,并且随着接管请求的启动,至少(b)中的指示应改变其特性,例如变为间歇信号或不同的颜色。
当使用间歇性信号时,应使用低频信号,以免不合理地提醒驾驶员。
在过渡阶段和最小风险操作MRM期间,(a)的指示可以被第4.4.3段中的接管请求指示所取代。

ALKS系统停用时状态指示:当系统状态从激活模式变为关闭模式时,ALKS系统停用时应至少通过光学报警信号向驾驶员指示。该光学信号应通过不显示用于指示激活模式的光学信号或不显示接管请求的指示来实现。此外,应提供声学报警信号,除非系统在接管请求(包含声学报警信号)之后被停用。
4.4.3 过渡阶段和最小风险操作
在过渡阶段和MRM期间,ALKS系统应以直观和明确的方式指示驾驶员接管车辆的控制。该指示应包括显示手和方向盘的图像信息,并可能附有附加的解释性文本或警告符号,如下例所示:
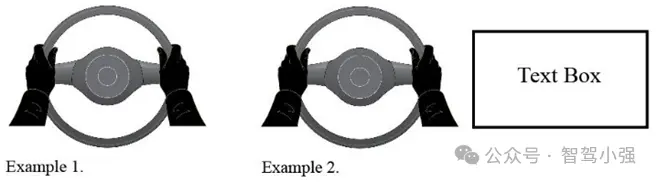
随着最小风险操作的开始,报警信号应改变其特征,以强调行动的紧迫性。例如,图像中的手和方向盘变为红色,并闪烁、转动。
4.4.4 第4.4段及上下文中给出了光学报警的部分实例,应使用实例或其他适当的光学报警。这应由主机厂证明,并应有书面证据支持。
4.4.5 ALKS警告的优先次序
在过渡阶段,ALKS、MRM或紧急机动EM的警告可以优先于车辆中的其他警告。
ALKS运行期间不同声学和光学警告的优先级应由主机厂在型式认证期间向认证机构申报。
5. 障碍物和事件感知与响应要求
5.1 感知要求
ALKS车辆应配备感知系统,至少可以在以下范围内确定驾驶环境(例如前方道路几何形状、车道线)和交通动态。
(a)其自身车道的整个宽度,以及左侧和右侧车道的整个宽度上,直至前方检测范围的极限;
(b)沿着车辆的全长,直至横向检测范围的极限。
如果ALKS能够执行LCP,除上述范围之外,传感系统应能够确定从ALKS车辆中心向前检测范围极限到向后检测范围极限测量的每侧至少9m宽度的交通动态。
5.1.1 前方探测范围
主机厂应声明从车辆最前方向前测量的检测范围。对于指定最大速度为60km/h的,该声明值应至少为46m。
| 指定的最大运行速度(km/h) | 前向最小感知距离(m) |
| 0-60 | 46 |
| 70 | 50 |
| 80 | 60 |
| 90 | 75 |
| 100 | 90 |
| 110 | 110 |
| 120 | 130 |
| 130 | 150 |
对于表中未提及的值,应使用线性插值。
认证机构应验证车辆感知系统在相关测试期间检测到道路使用者的距离应大于等于申报值。
如果ALKS能够执行LCP,本段的要求适用于该系统。申报的纵向感知范围,须至少覆盖从ALKS车辆中心线向LCP目标车道侧至少9m的范围。认证机构应验证车辆感知系统在相关测试期间检测到道路使用者的距离应大于等于申报值。
5.1.2 横向探测范围
主机厂应声明横向检测范围。声明的范围应足以覆盖紧邻车辆左侧的车道和紧邻车辆右侧的车道的整个宽度。
认证机构应验证车辆感知系统在相关测试期间检测到道路使用者的距离应大于等于申报值。
如果ALKS能够执行LCP,本段的要求适用于该系统。主机厂还应声明横向检测范围,该范围至少覆盖从ALKS车辆中心线向LCP目标车道侧至少9m的范围。认证机构应验证车辆感知系统在相关测试期间检测到道路使用者的距离应大于等于申报值。
5.1.3 向后探测范围
如果ALKS能够执行LCP,则本段的要求适用于该系统。
主机厂应声明从车辆最后端向后测量的检测范围。该后向声明范围应至少覆盖从ALKS车辆中心线向左右各9m的宽度。认证机构应验证车辆感知系统在相关测试期间检测到道路使用者的距离应大于等于申报值。
5.1.4 转向灯状态检测区域
主机厂应声明潜在车辆存在区域PVPA内ALKS系统能够评估其他车辆转向灯状态的区域(如果有的话)。这应考虑到在PVPA中正常运行的车辆在系统运行国家的不同转向灯位置。
认证机构在相关测试期间应验证该区域。
5.1.6 主机厂应提供证据,证明传感器磨损和老化的影响不会使感知系统的性能在ALKS系统的使用寿命内降低到低于第5.1段规定的最低要求值。
5.1.7
应向认证机构证明第5.1款及其各项规定的履行情况,并进行相关测试。
5.1.8 单一感知故障故障不应引发危险事件(冗余备份)。主机厂应描述所实施的设计策略,并由认证机构进行评估确认。



 广告
广告 



最新资讯
-
OBD检测造假:机构与车主的红线与底线
2025-06-16 10:16
-
续航600公里!依维柯发布新款电动长途重卡S
2025-06-16 08:47
-
4项标准修改单+2项油耗新标准!达安中心首
2025-06-16 08:45
-
分布式驱动车辆的爆胎稳定性控制
2025-06-16 08:43
-
新能源汽车电控系统参数匹配及优化
2025-06-16 08:38
