




 广告
广告





















































智能网联汽车先进驾驶辅助系统全解析

随着先进驾驶辅助系统(ADAS)技术的快速发展,将帮助车辆逐步实现自动化驾驶,并最终达到无人驾驶的目标。全国汽车标准化技术委员会将ADAS定义为利用安装在车辆上的传感、通信、决策及执行等装置,监测驾驶人、车辆及其行驶环境,并通过影像、灯光、声音、触觉提示/警告或控制等方式辅助驾驶人执行驾驶任务,或主动避免/减轻碰撞危害的各类系统的总称。
1、先进驾驶辅助系统
智能网联汽车先进驾驶辅助系统(ADAS)利用环境感知技术采集汽车、驾驶员和周围环境的动态数据并进行分析处理,通过提醒驾驶员或执行器介入汽车操纵,以实现驾驶安全性和舒适性。

自主式先进驾驶辅助系统按照功能可以分为自主预警类、自主控制类和视野改善类等。
①自主预警类:指自动监测车辆可能发生的碰撞危险并提醒,从而防止发生危险或减轻事故伤害。
自主预警类ADAS(来源《智能网联汽车概论》)
②自主控制类:指自动监测车辆可能发生的碰撞危险并提醒,必要时系统会主动介入,从而防止发生危险或减轻事故伤害。
自主控制类ADAS(来源《智能网联汽车概论》)
③视野改善类:指提高在视野较差环境下的行车安全性。
视野改善类ADAS(来源《智能网联汽车概论》)
④网联式先进驾驶辅助系统:基于V2X通信完成环境感知,依靠云端大数据进行分析决策,例如汽车自动引导系统等,目前还处于试验阶段。
网联式先进驾驶辅助系统功能主要有交通拥堵提醒、闯红灯警示、弯道车速警示、停车标志间隙辅助、减速区警示、限速交通标志警示、现场天气信息警示、违反停车标志警示、违规穿过铁路警示、过大车辆警示等。
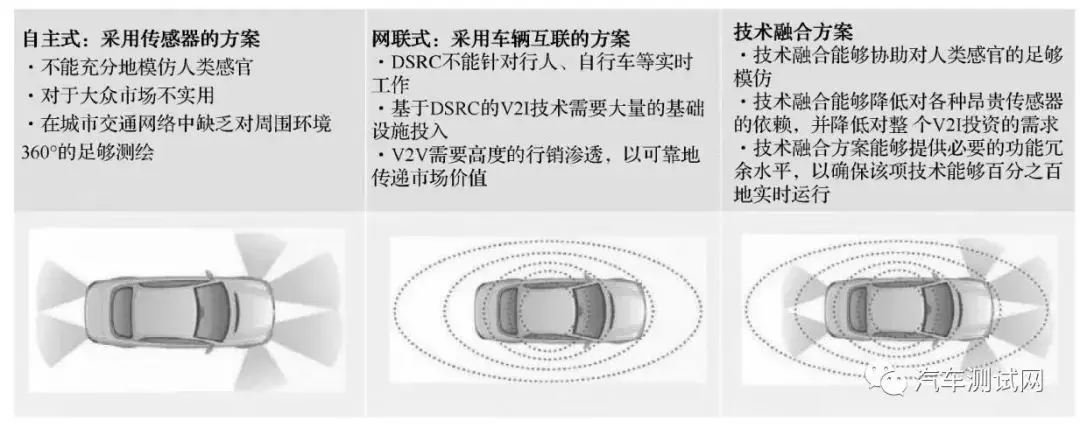
自主式和网联式融合是ADAS发展的必然趋势(来源《智能网联汽车概论》)
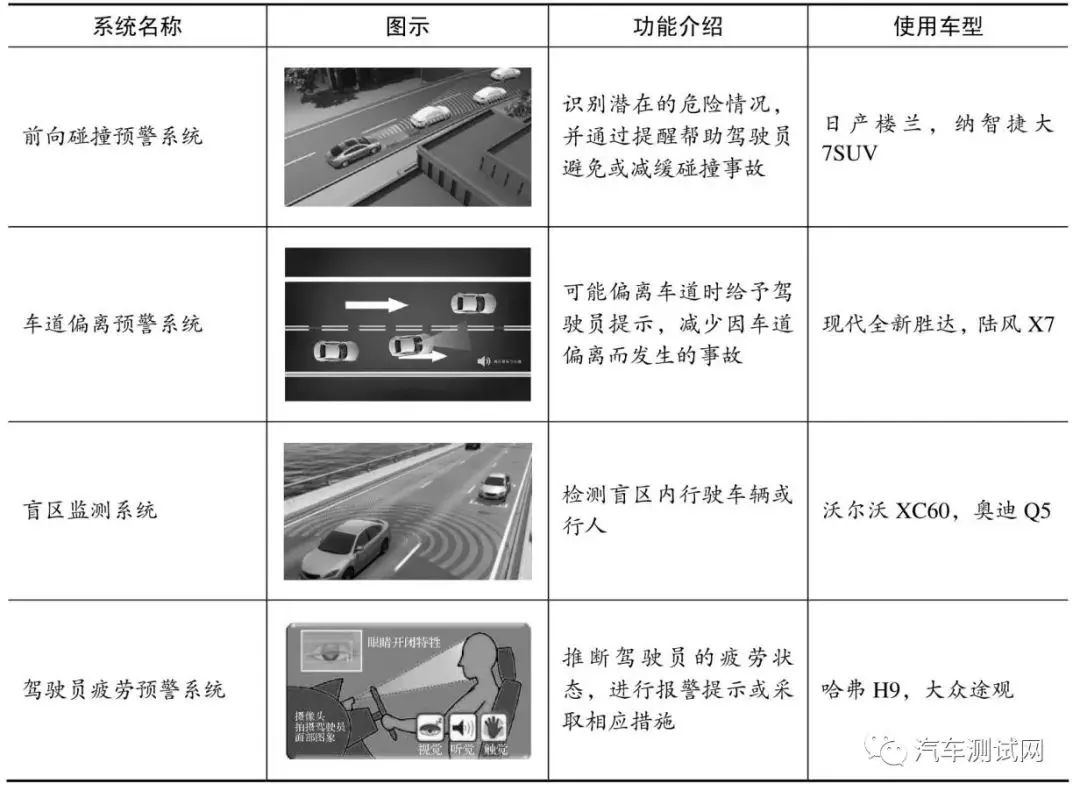
2、前向碰撞预警系统
前向碰撞预警(FCW)系统通过雷达或视觉传感器时刻监测前方车辆,判断本车与前车之间的距离、方位及相对速度,当存在潜在碰撞危险时对驾驶员进行警告。
前向碰撞预警系统由信息采集、电子控制和人机交互三个单元组成。
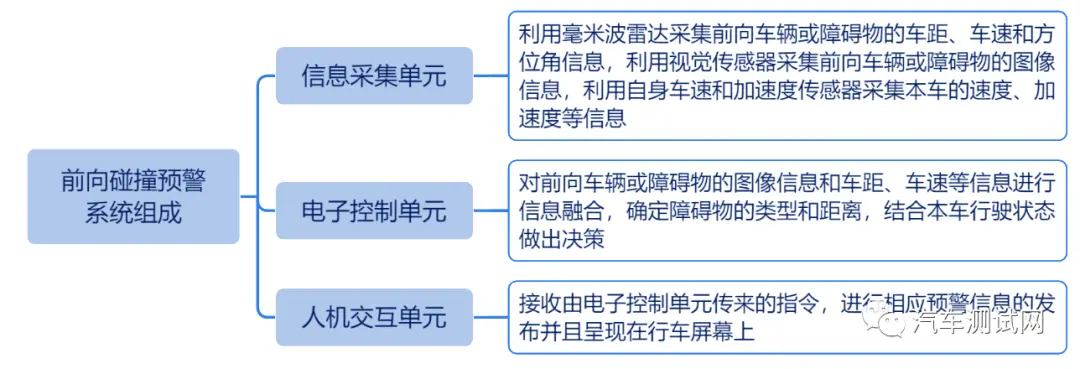
前向碰撞预警系统工作过程主要分为前方车辆识别、前方车距检测、建立安全车距预警模型。

V2x应用场景前向碰撞预警系统
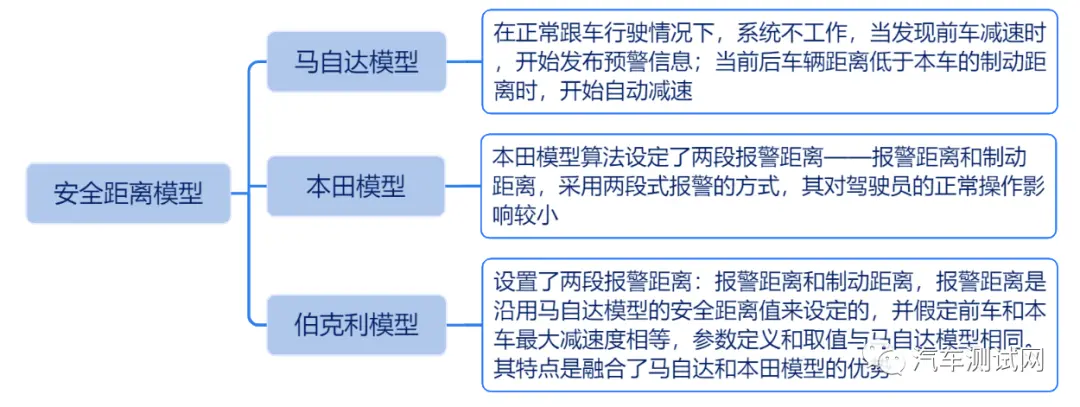
目前经典的安全距离模型主要有马自达模型、本田模型以及伯克利模型,均为基于距离的FCW算法。后续的很多模型都是在经典模型的基础上进行改良。
在目前应用中,搭载有前向碰撞预警系统的车型较多,应用广泛,并通常与辅助制动系统共同工作,以免在预警不及时或预警未被驾驶员采纳的情况下发生追尾碰撞,提高行车的安全性和舒适性。
3、车道偏离预警系统
车道偏离预警系统(LDWS)是车辆辅助驾驶系统中的重要组成部分,根据前方道路环境和本车位置关系,判断车辆偏离车道的行为并对驾驶员进行及时提醒,从而防止由于驾驶员疏忽造成的车道偏离事故的发生。
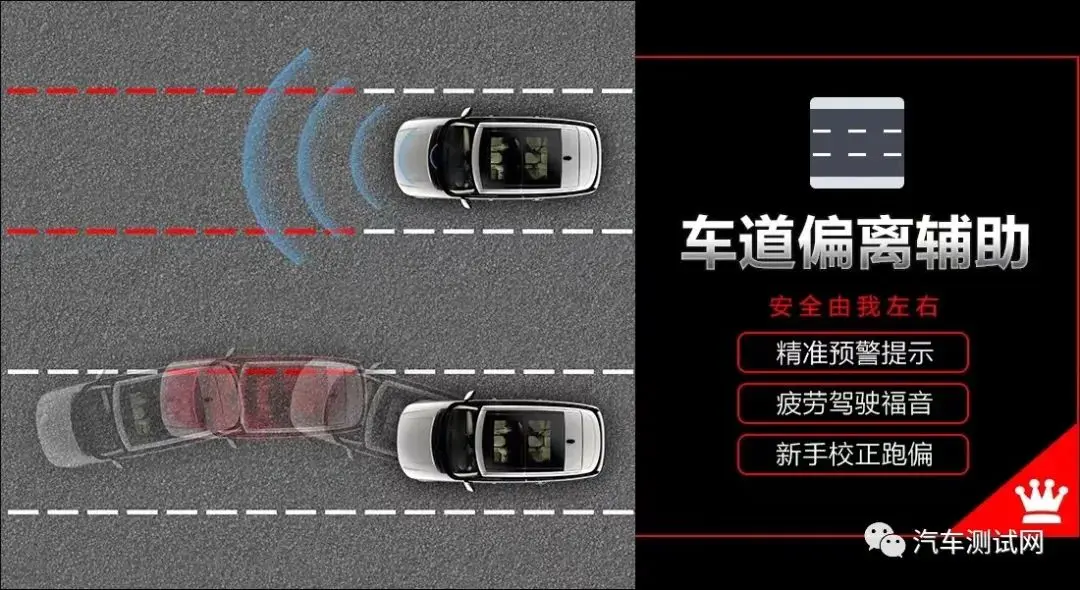
车道偏离预警系统
车道偏离预警系统主要由信息采集单元、电子控制单元和人机交互单元等组成。
车道偏离预警作为一项能够有效地规避驾驶事故的先进驾驶辅助技术,已经受到了汽车厂商的重视。随着传感器技术和智能算法的发展,车道偏离预警系统将会在汽车上得到普遍的推广。
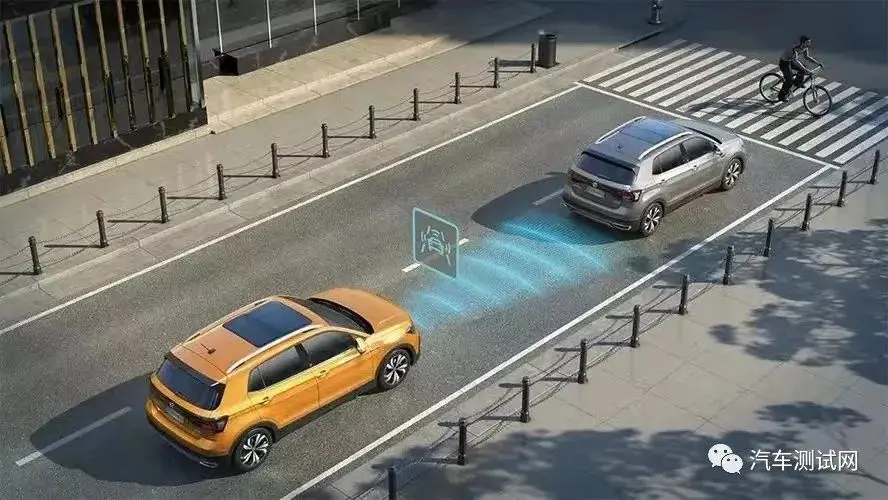
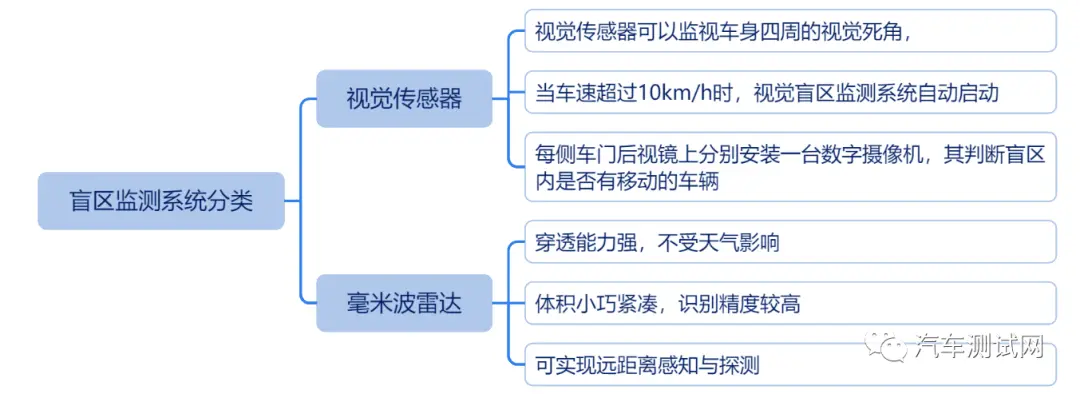
4、盲区监测系统
汽车视野盲区主要有前盲区、两侧盲区(包括A柱盲区、B柱盲区和C柱盲区)、后盲区和后视镜盲区,其中,最容易引发交通事故的是A柱盲区和后视镜盲区。

A柱盲区和后视镜盲区
盲区监测系统一般由信息采集单元、电子控制单元和预警显示单元等组成,如图。
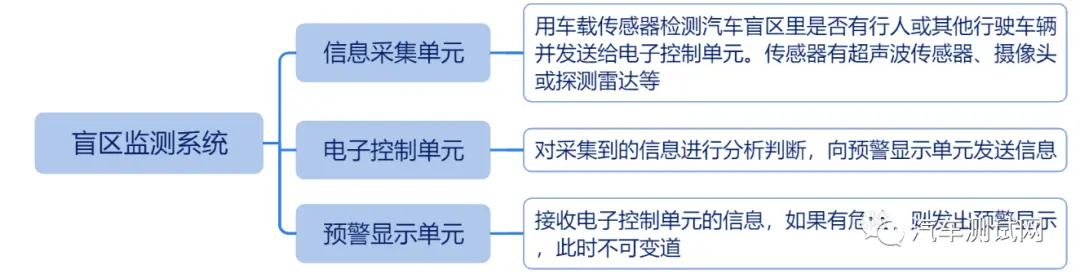
盲区监测系统能避免行车安全隐患,提高车辆行驶安全性,许多汽车厂商都推出各自的盲区监测系统。
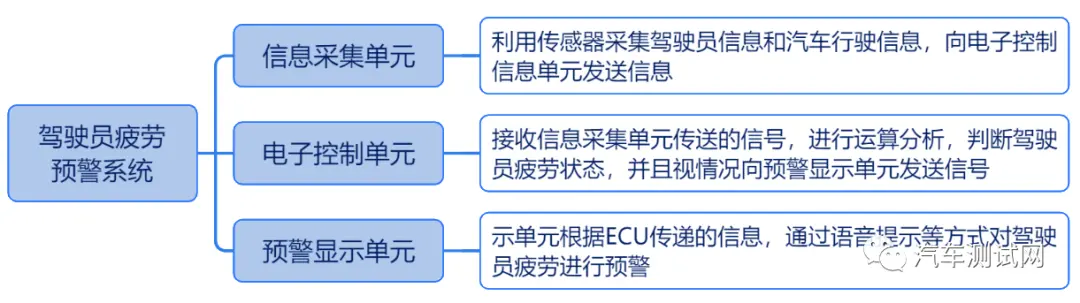
5、驾驶员疲劳预警系统
驾驶员疲劳预警系统是指驾驶员精神状态下滑或进入浅层睡眠时,系统会依据驾驶员精神状态指数分别给出语音提示、振动提醒、电脉冲警示等,警告驾驶员已经进入疲劳状态,需要休息。

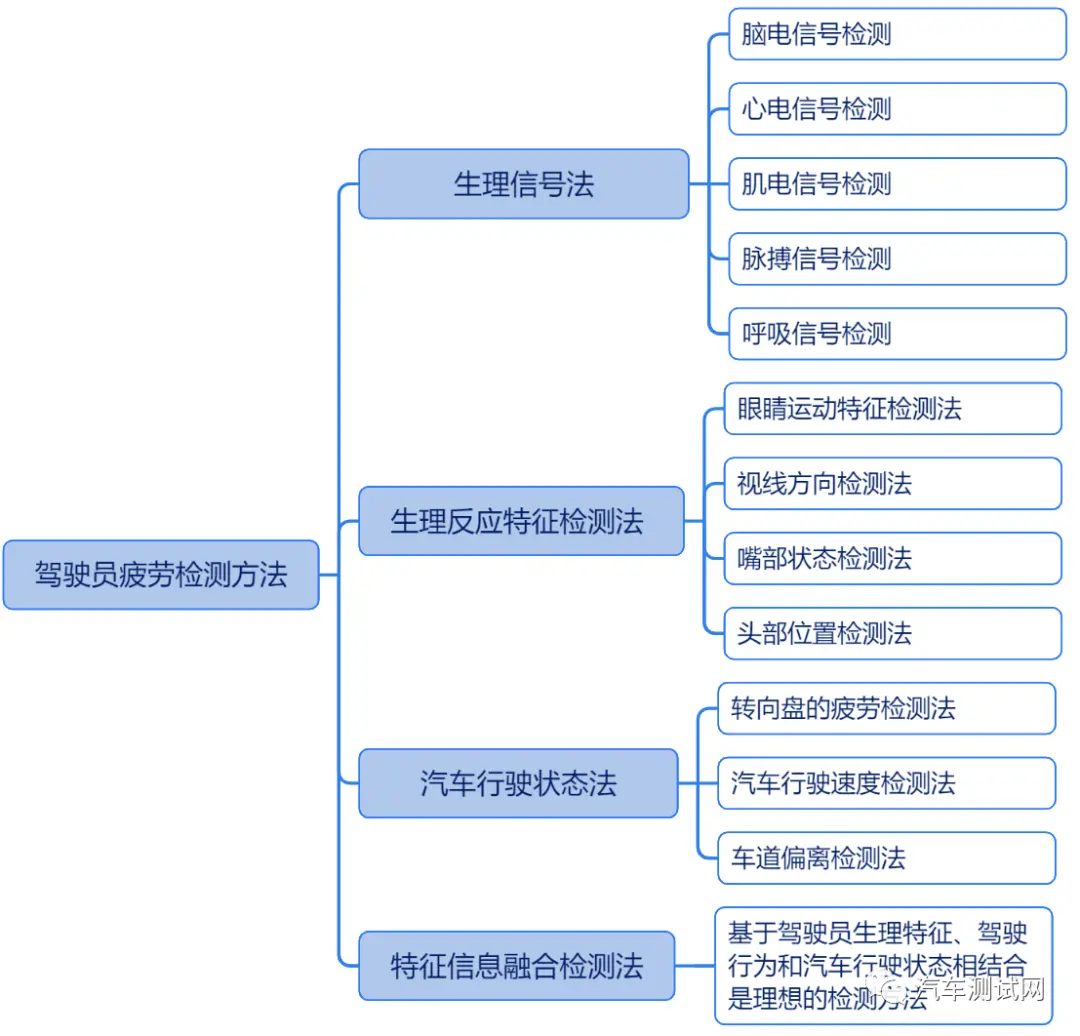
驾驶员疲劳预警系统
驾驶员疲劳预警系统一般由信息采集单元、电子控制单元和预警显示单元等组成。
驾驶员疲劳检测方法主要有基于驾驶员自身特征(包括生理信号和生理反应特征)的检测方法、汽车行驶状态的检测方法和多特征信息融合的检测方法等。
随着汽车市场的发展,社会对生命关怀程度的加深,政府对交通安全的重视,技术的进一步成熟,硬件成本的逐渐降低,驾驶员疲劳检测产品越来越被企业和个人接受与应用,它必将具备极佳的市场应用前景。
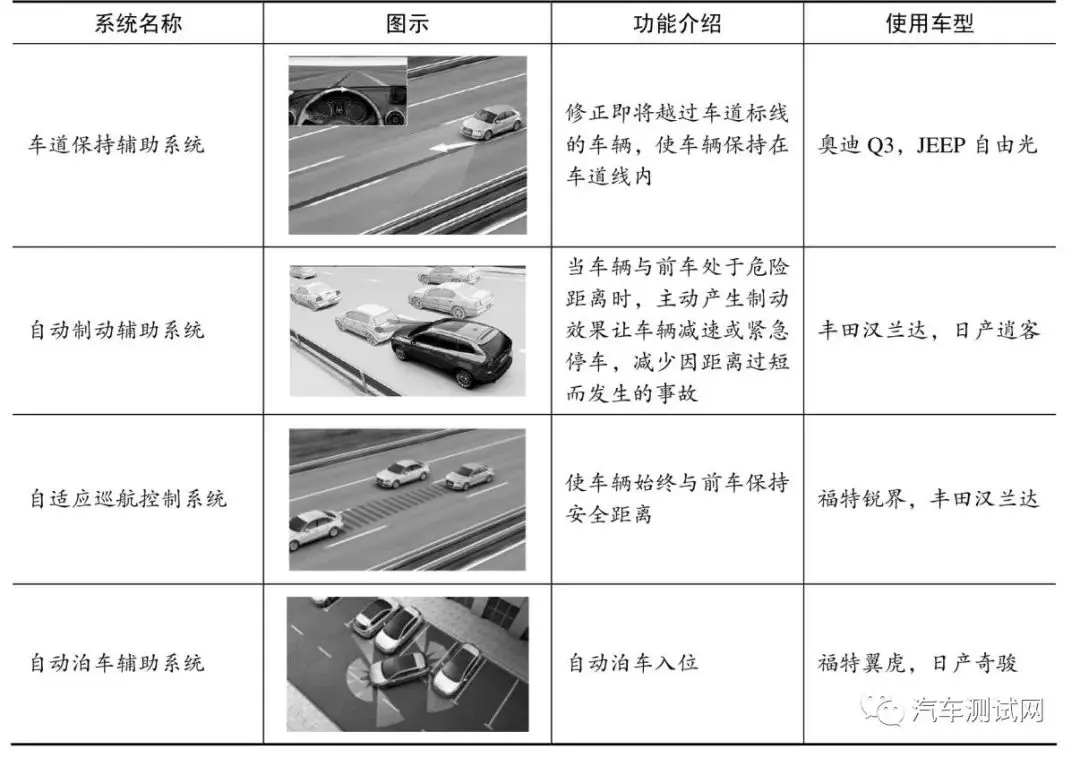
6、自动制动辅助系统
汽车自动制动辅助(AEB)系统可以预知潜在的碰撞危险并及时通知驾驶员,而且在必要的情况下,此系统会自动控制制动踏板完成制动操作,以避免或减轻碰撞伤害。
汽车自动制动辅助(AEB)系统
汽车自动制动辅助(AEB)系统主要由行车环境信息采集单元、电子控制单元和执行单元等组成。

汽车自动制动系统应和其他控制系统相结合,采用智能型传感器、快速响应的执行器、高性能电控单元、先进的控制策略、无线通信等技术,以提高汽车的主动安全性,使车辆从被动防撞减少伤害向主动避撞减少事故的方向发展。
7、自适应巡航控制系统
汽车自适应巡航控制(ACC)系统是在汽车行驶过程中,安装在汽车前部的车距传感器持续扫描汽车前方道路,同时轮速传感器采集车速信号。
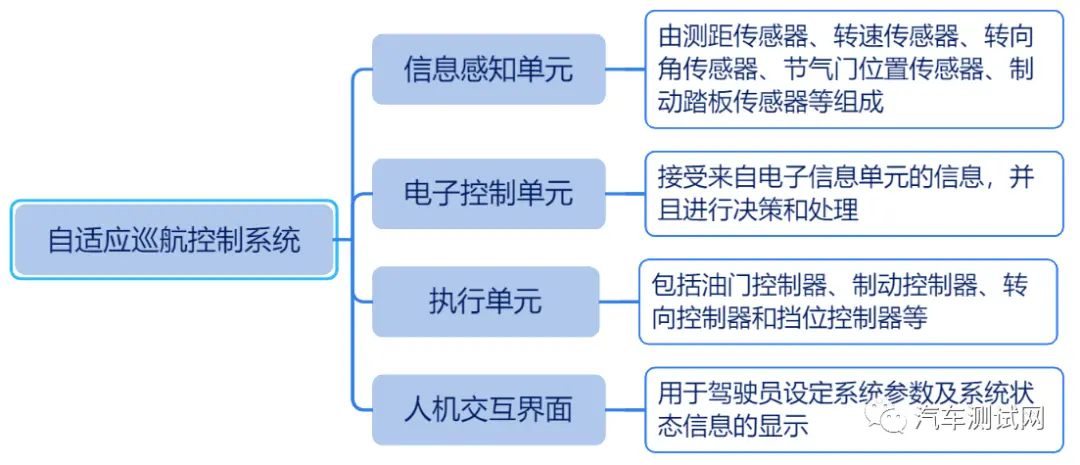
燃油汽车ACC系统主要由信息感知单元、电子控制单元(ECU)、执行单元和人机交互界面等组成
汽车ACC系统的工作模式主要有定速巡航、减速控制、跟随控制、加速控制、停车控制和启动控制等。驾驶员疲劳预警系统使汽车辅助驾驶的品质达到了新的高度,驾驶员的大量任务可由ACC系统自动完成,在很大程度上减轻了驾驶员的负担。
ACC系统
例如沃尔沃汽车ACC系统具有以下功能:
它在0~200km/h的范围内都可以实现自动;
跟车;
(2)对前车的识别能力强。当前车转弯或超车时,能快速捕捉到新的前方车辆,继续自动跟车;
(3)如果有车辆插队驶入两车之间,ACC系统会调节车速以保持之前设定的两车之间的安全车距;
(4)具有辅助超车功能。如果感觉前车较慢,当驾驶员开启转向功能进入另外一条车道,准备超车时,汽车会瞬时加速以尽快超过前车。
8、自动泊车辅助系统
自动泊车辅助系统(PA)是利用车载传感器探测有效泊车空间,并辅助控制车辆完成泊车操作的一种汽车先进驾驶辅助系统。相比于传统的电子辅助功能,比如倒车雷达、倒车影像显示等,自动泊车辅助系统智能化程度更高,减轻了驾驶员的操作负担,有效降低了泊车的事故率。
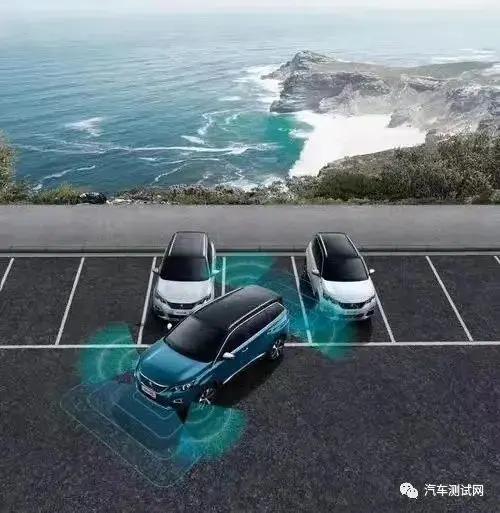
自动泊车辅助系统
自动泊车辅助系统主要由感知单元、中央控制器、转向执行机构和人-机交互系统组成。全自动泊车技术是实现汽车无人驾驶的重要环节,目前还处于试验阶段,真正达到全自动泊车的应用,还有很多技术需要解决完善。
总而言之,智能网联汽车先进驾驶辅助系统的研究具有重要意义,它不仅推动了汽车行业的技术革新,更关乎人们的生命安全和出行便利。智能网联汽车先进驾驶辅助系统过整合先进技术,能够提高驾驶安全性、降低交通事故发生率,减少交通拥堵,同时也为实现自动驾驶技术打下基础,为未来出行方式和城市交通规划带来革命性的变革。



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
