




 广告
广告





















































自动驾驶系列科普 | 自动驾驶测试场景抽象分级

科普,就像一座灯座,照亮探索未知世界的道路。在这个信息爆炸的时代,需要将真实、准确的科学知识以简洁、易懂的方式传递给读者,更全面地认识科技发展带来的便利。
本篇是自动驾驶系列科普的第二篇,将主要介绍自动驾驶测试场景的抽象分级。让我们一同踏上神奇的科普之旅,探索无限可能。
01
抽象分级概述
如何将场景描述出来,并且让不同的使用者能够互相理解,是研究驾驶场景的基础。
一个科学合理的场景抽象分级模型可以有效地减少利益相关者之间的沟通成本,而一个能够使人类和机器同时理解的描述语言则是场景仿真技术的基石。
为了描述交通事件的演变,我们需要考虑环境的快照,称之为Scene(即情景)。Scene包含环境、静态和动态交通要素、所有行动者和观察者的表现,以及这些实体之间的关系。
与 Scene 不同,Scenario(即场景)描述的是时间跨度。场景是对一系列情景随着时间推移的演变的描述。为了描述场景的时间发展,可以使用行动和事件以及相关参与者的目的地和对应的参数值,而场景的描述也可以根据需求和应用目的的不同而分成不同的层级。

2018年,德国PEGASUS项目提出了场景三层抽象分级,即功能场景、逻辑场景、具体场景,并在全球范围内获得了行业的一致认同,逐渐成为行业通用的场景分级标准。
然而从2018年至今,人们在该分级模型的应用实践中发现, 三层分级模型对于当前的驾驶场景工程应用,尤其是在仿真工程应用中渐渐显露出它的局限性。
因此,2021年,由PEGASUS的后续项目 VVM(Verificationand Validation Method)中的专家提出了场景四层抽象分级模型概念,在三层分级模型的基础上,新增了抽象场景这一层级,并被 ISO 34501采纳,纳入了国际标准体系。
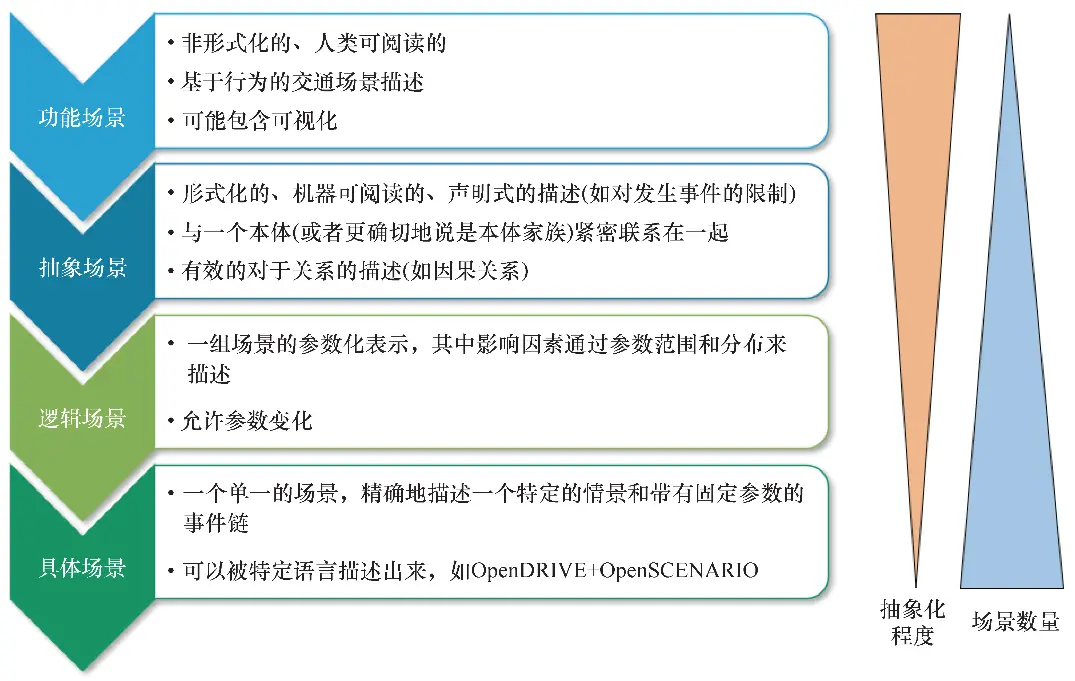
场景四层抽象分级模型
上图展示了场景四层抽象分级模型及其之间的关系,按照功能场景、抽象 场景、逻辑场景和具体场景的顺序,抽象化程度逐渐降低,但场景数量逐渐增加。下面将对四层模型的概念进行展开介绍。
02
四层抽象分级的具体定义
功能场景是最抽象级别的操作场景,是抽象行为场景的非形式化的自然语言描述,通过语言场景符号来描述场景区域内的实体以及实体间的关系。
这种描述是一种非控制的、自由风格的语言,通常指的是功能规范。它不是机器可读的,但也可能支持某些元素的可视化表达。通常人们将功能场景描述形式用于创建场景的第一步,它的抽象程度是最高的,场景数量最少。
比如,一个典型的功能场景描述如下:①基本道路信息:3个机动车车道线的曲线道路,交通标志限速100km/h。②动态目标:交通堵塞,主车靠近中间车道,车流缓慢同行。③环境:夏天、下雨。
功能场景主要用于概念阶段的项目定义、危险分析和风险评估。在测试过程中,往往需要将功能场景转换为逻辑场景,并转换为可用于相应仿真环境的数据格式。
抽象场景是形式化的、机器可阅读的、声明式的描述(如对发生事件的限 制),并能有效地描述复杂关系(如因果关系)。
这一级别的描述是人机可读的,允许工具将其作为输入格式读取、处理和合成工件。当然,抽象场景也可以用自然语言表达,功能场景和抽象场景之间的区别在于,抽象场景是正式的且机器可读的。
抽象场景描述通常与一个本体(或者更确切地说是本体家族)紧密联系在 一起,大大提高了所使用术语的精度。抽象场景可以使用约束条件捕捉属性和行为之间的依赖和关系。这一抽象水平适用于场景演示和ODD的描述需求。
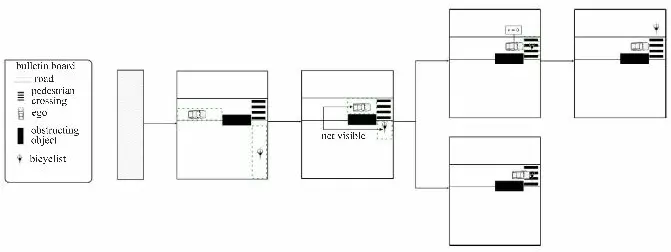
抽象场景:骑自行车横穿一条有障碍物的人行横道
上图展示了一个典型的抽象场景描述 “骑自行车的人横穿一条有障碍物遮挡的人行横道”,它从左至右描述了一个随时间迁移的情境序列TSCs(Traffic Sequence Charts)。展现出两种可能出现的场景:上图为本车在人行横道前制动,骑自行车的人安全穿过马路;而在下图中,本车与骑自行车的人发生碰撞。
逻辑场景是一组场景的参数化表示,其中影响因素通过参数范围和分布来描述,并允许参数的变化。
逻辑场景中不指定所有参数的具体值,但提供值的可选范围。其目的是在仿真或测试的过程中,通过选择范围外的具体数值来允许参数值的变化,可以通过预定义步骤、分布函数或者随机性来实现。逻辑场景的自由维度构成了一个场景空间。
一个典型的逻辑场景描述如下:①基本道路信息:车道宽 3~3.5m,曲率半径0.6~0.9km,交通标志位置0~200m。②动态目标:交通拥堵车流终点10~200m,交通拥堵车流速度0~30km/h,主车距离50~300m,主车速度80~130km/h。③环境:温度10~40℃,雨水颗粒尺寸 20~100µm。
具体场景是一个单一的场景,它精确地描述一个特定的情景和带有固定参 数的事件链,并可以被特定语言描述出来,如OpenDRIVE 和 OpenSCENARIO。
一般情况下,一个具体场景可以由固定一个逻辑场景的所有参数取值演变而来,与之相反的,一旦没有提供具体场景的某一参数值,该场景就会成为一个逻辑场景。
一个典型的具体场景描述如下:①基本道路信息:车道宽3m,曲率半径 0.8km,交通标志位置50m。②动态目标:交通拥堵车流终点60m,交通拥堵车流速度10km/h,主车距 150m,主车速度90km/h。



 广告
广告 编辑推荐




最新资讯
-
【新品上市】电阻计RM3546:重新定义焊接质
2026-01-23 11:24
-
智能安全配置迈向“主流标配”:C-IASI安全
2026-01-23 11:14
-
直播|经纬恒润:车载光通信的开发与测试
2026-01-22 18:49
-
车载光通信走向实车验证
2026-01-22 18:48
-
解析GB/T 47001-2025智能网联汽车数字身份
2026-01-22 14:48
