




 广告
广告





















































法规标准-GB/T 39265标准解读(2020版)


作者:王文林 | 奇瑞自动驾驶产品经理
本文获作者授权
GB/T 39265是做什么的?
GB/T 39265全名为道路车辆 盲区检测系统性能要求及试验方法,其中主要是对BSD系统的性能要求及测试步骤进行了介绍。本文仅解读M1、N1类车辆相关内容。
一般要求
系统开启与关闭
1.BSD系统应具备手动开启和关闭的功能
2.手动关闭时,应发出状态指示信号
激活要求
BSD系统开启且出于非激活状态时,系统可检测目标车辆,但不应向驾驶员发出警告。BSD系统激活时,系统至少能通过下列方式之一激活:
a)启动激活:车辆启动后,系统自动启动并进入激活状态;
b)最低速度激活:车辆速度达到系统设计的最低激活车速时,系统自动激活
c)转向信号激活:系统接收到车辆发出的转向信号或判定其即将或正在进行转向操作时,自动激活目标转向区域一侧的系统功能
人机交互要求
警告方式
系统应采用易被驾驶员感知的方式发出警告信息,并能清晰的指示目标车辆出现的一侧。警告指示信息应明显区分于车辆中其他系统的警告信息
开启/关闭指示要求
系统应具有开启状态/关闭状态的指示。该指示应目视可见
系统故障指示要求
系统应具有系统故障指示提醒功能,其提醒状态标识应被驾驶员清晰观测
自检要求
系统至少应具备以下自检功能:
——检查相关电气部件是否正常运行;
——检查相关传感元件是否正常运行;
自检时,不应出现明显的延迟;在发生电子、电器故障时,故障指示也不应出现明显得延迟
性能要求
M1、N1类车辆盲区监测范围
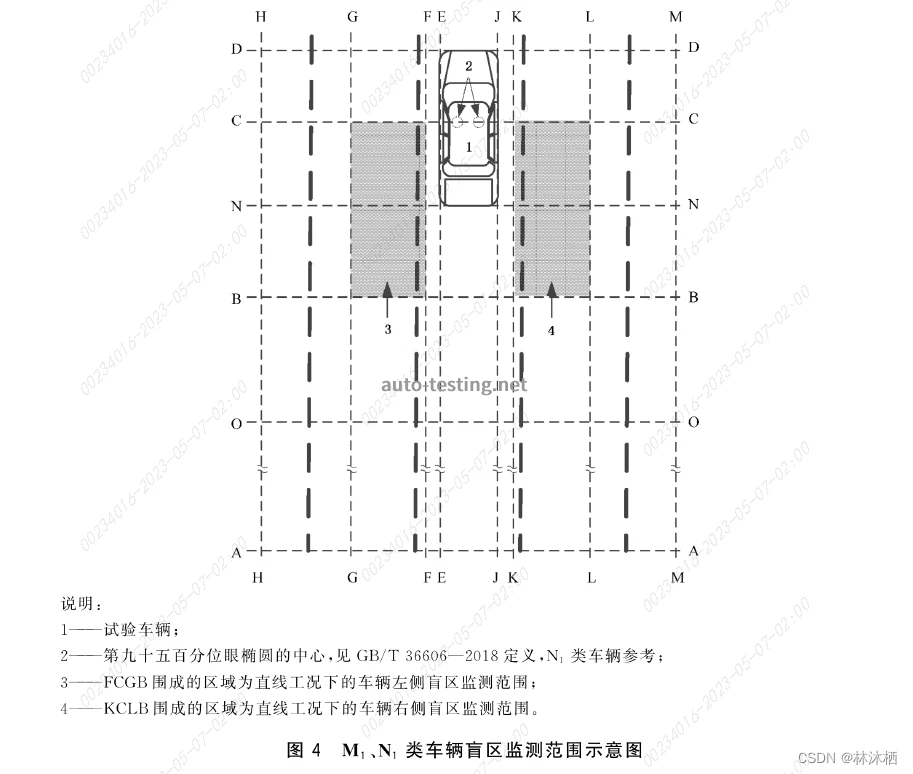
M1、N1类车辆盲区检测范围如图所示,图中线条旨在更准确说明盲区监测警告要求,右侧、左侧和后部等描述参考试验车辆的行驶方向,图中所给出的所有尺寸均相对试验车辆而言,具体各线条含义如下所示:
——线A平行于试验车辆后缘,并位于试验车辆后缘后部30.0m处;
——线B平行于试验车辆后缘,并位于试验车辆后缘后部3.0m处;
——线C平行于试验车辆前缘,并位于第九十五百分位眼椭圆的中心;
——线D为试验车辆前缘的双向延长线;
——线E平行于试验车辆的中心线,并位于试验车辆车身(不包含外后视镜)左侧的最外缘;
——线F平行于试验车辆的中心线,并位于试验车辆车身左侧最外缘的左边,与左边最外缘相距0.5m;
——线G平行于试验车辆的中心线,并位于试验车辆车身左侧最外缘的左边,与左边最外缘相距3.0m;
——线H平行于试验车辆的中心线,并位于试验车辆车身左侧最外缘的左边,与左边最外缘相距6.0m;
——线J平行于试验车辆的中心线,并位于试验车辆车身(不包含外后视镜)右侧的最外缘;
——线K平行于试验车辆的中心线,并位于试验车辆车身左侧最外缘的右边,与右边最外缘相距0.5m;
——线L平行于试验车辆的中心线,并位于试验车辆车身左侧最外缘的左边,与左边最外缘相距3.0m;
——线M平行于试验车辆的中心线,并位于试验车辆车身左侧最外缘的左边,与左边最外缘相距6.0m;
——线N为试验车辆后缘的双向延长线;
——线O平行于试验车辆后缘,并位于试验车辆后缘后部10.0m处
左侧盲区警告要求
当目标车辆处于以下条件所列范围内时,系统应发出左侧盲区警告
——目标车辆的任何部位位于B线前面;
——目标车辆完全位于C线后面;
——目标车辆完全位于F线左侧;
——目标车辆的任何部位位于G线右侧;
如果目标车辆任何部位均未处于A、D、E和H四条直线交叉覆盖区域内,则不应发出左侧盲区警告
右侧盲区警告要求
当目标车辆处于以下条件所列范围内时,系统应发出左侧盲区警告
——目标车辆的任何部位位于B线前面;
——目标车辆完全位于C线后面;
——目标车辆完全位于K线右侧;
——目标车辆的任何部位位于L线左侧;
如果目标车辆任何部位均未处于A、D、J和M四条直线交叉覆盖区域内,则不应发出右侧盲区警告
系统响应时间
当目标车辆从侧后方进入盲区监测范围内时,从目标车辆进入盲区监测范围到系统发出警告的时间应不大于300ms
可选盲区警告抑制
如果试验车辆正在超越目标车辆,且目标车辆从前方进入检测范围,则可将盲区警告抑制一段时间,警告抑制时间不应大于2s
试验方法
目标车辆(摩托车)识别试验

试验车辆以(40±2)km/h匀速直线行驶,目标车辆(摩托车)以(55±5)km/h由侧后方驶向并超越试验车辆,行驶过程中应保持目标车辆(摩托车)车身的最外缘与试验车辆中心线之间的距离为2.0m-3.5m,当目标车辆从侧后方行驶进入试验车辆盲区监测范围时,系统应发出警告,警告发出的时间不得晚于目标车辆前缘穿过C线。当目标车辆(摩托车)的前缘超越试验车辆C线3m时,试验结束。测试完成后应在试验车辆另一侧重复进行该试验
直线道路并道试验
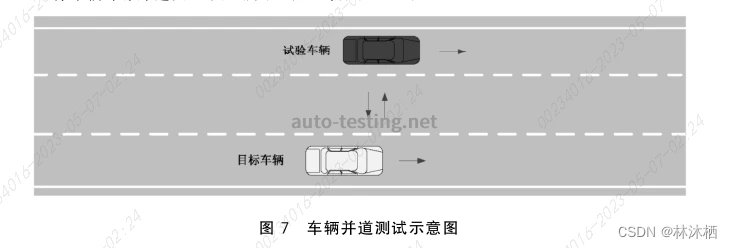
试验车辆以(50±2)km/h匀速直线行驶,目标车辆以(50±2)km/h匀速行驶并保持与试验车辆的横向距离为6.0m-7.0m,当目标车辆越过B线,完全在C线之后时,以0.25m/s-0.75m/s的侧向速度分别从试验车辆侧后方进行变道,直至两车的横向距离为(1.5±0.3)m,变道完成后,确保目标车辆仍然越过B线并完全在C线之后,目标车辆至少保持直线行驶300ms,然后变道范围最初车道线,试验结束。测试完成后应在试验车辆另一侧重复进行该试验。
当目标车辆并道接近试验车辆时,盲区监测系统应满足:
a)当目标车辆完全位于H线或M线外时,BSD系统不应发出警告;
b)当目标车辆的任何部分位于试验车辆的盲区时,系统应发出警告,警告发出的时间不得晚于目标车辆最外缘穿过L/G线后300ms
直线道路目标车辆超越试验车辆试验


试验车辆以(50±2)km/h匀速直线行驶,目标车辆在相邻车道匀速直线行驶并保持与试验车辆的横向距离为(1.5±0.3)m,目标车辆以高于试验车辆的速度匀速行驶并超越试验车辆,目标车辆按照表中规定场景的车速行驶于试验车辆侧后方,当两车达到试验开始两车纵向距离时,试验开始。当目标车辆的前缘超越试验车辆C线3.0m时,试验结束。测试完成后应在试验车辆另一侧重复进行该试验。
当目标车辆接近试验车辆时,盲区监测系统要求如下:
a)当目标车辆完全位于A线之后时,BSD系统不应发出警告;
b)当目标车辆的任何部分位于试验车辆的盲区时,系统应发出警告,警告发出的时间不得晚于目标车辆前缘穿过B线后300ms
目标车辆变道超越试验车辆试验
试验车辆以(50±2)km/h匀速直线行驶,目标车辆以(60±2)km/h同车道驶向试验车辆,开始试验时,目标车辆与试验车辆相距大于20m,当目标车辆距试验车辆B线10m时,目标车辆以0.55m/s-0.85m/s的侧向速度从试验车辆侧后方进行变道至两车的横向距离为(1.5±0.3)m,变道完成后, 目标车辆保持直线行驶,直至目标车辆完全超越试验车辆的前缘,当目标车辆的前缘超越试验车辆C线3m时,试验结束。测试完成后应在试验车辆另一侧重复进行该试验。当目标车辆的任何部分位于试验车辆的盲区时,系统应发出警告,警告发出的时间不得晚于目标车辆外缘穿过B线或F线后300ms
直线道路双目标车辆超越试验车辆试验

试验车辆以(50±2)km/h匀速直线行驶,目标车辆以(60±2)km/h在相邻车道匀速直线行驶并保持与试验车辆的横向距离为(1.5±0.3)m,开始试验时,目标车辆距试验车辆B线纵向距离大于11m,当目标车辆的前缘超越试验车辆C线3.0m时,试验结束。
当目标车辆接近试验车辆时,盲区监测系统要求如下:
a)当目标车辆完全位于A线之后时,BSD系统不应发出警告;
b)当双目标车辆的任何部分位于试验车辆的盲区时,系统应发出警告,警告发出的时间不得晚于目标车辆前缘穿过B线后300ms
版权声明:本文为CSDN博主「林沐栖」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_50875614/article/details/130538355
- 下一篇:电动汽车制动系统的测试与优化
- 上一篇:汽车质量、可靠性和耐久性的区别与联系



 广告
广告 



最新资讯
-
印度马恒达访问泽尔测试,深入交流汽车测试
2025-06-16 17:41
-
获首批CCTA充电兼容认证!北京现代ELEXIO开
2025-06-16 17:39
-
2025智驾“封神榜”测评——高速场景|小米S
2025-06-16 15:18
-
直播 | 汽车EMC新探索(整车动态EMC和混响室
2025-06-16 14:42
-
直播 | 车载毫米波雷达和雷达罩测试方案
2025-06-16 14:42
