




 广告
广告





















































技术科普丨如何实现基于数字孪生技术的自动驾驶VIL测试?

“安全”是汽车的核心理念和价值观,对于自动驾驶车辆而言,整体的安全设计与验证更是一项极度复杂的系统工程。在模拟仿真领域,VIL(Vehicle in Loop)被测对象即为真实车辆,能够保证车辆动力学与整车控制器系统交互的真实性,可有效解决仿真测试置信度不够与道路测试成本高、效率低、复现难的问题。
01、整车在环VIL仿真系统概述
“安全”是汽车的核心理念和价值观,对于自动驾驶车辆而言,整体的安全设计与验证更是一项极度复杂的系统工程。从研发到验证,都需要通过多种手段(模拟仿真、封闭场地、公开道路)进行充分的功能安全和性能安全测试来证明其运行安全性。
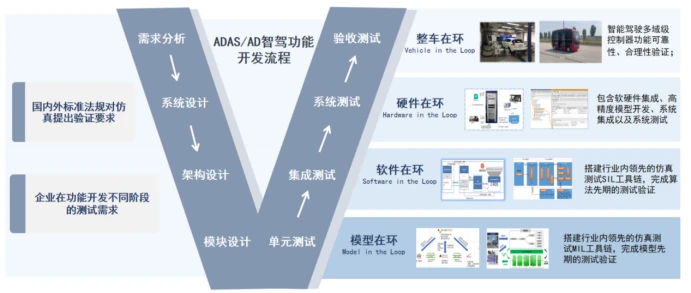
在模拟仿真领域,相比于传统的模型在环(MIL)、软件在环(SIL)、硬件在环(HIL)等方式,实车在环VIL(Vehicle in Loop)测试系统的被测对象为真实车辆,能够保证车辆动力学与整车控制器系统交互的真实性,同时通过数字孪生技术实现虚拟混杂场景复现及物理级感知信号模拟,可有效解决仿真测试置信度不够与道路测试成本高、效率低、复现难的问题。
自动驾驶VIL测试系统作为数字孪生技术在汽车行业的典型应用,以真实车辆作为被测对象,通过构建和现实世界一致的虚拟环境模型,借助传感器信号模拟器和实时处理机进行虚拟映射,同时基于高精度惯导组合采集真实车辆的位姿信息驱动场景更新,实现虚实结合下的闭环验证。
1.1、VIL测试系统硬件组成
VIL测试系统整体由设备硬件、仿真软件、传感器信号模拟器、场景库及测评体系等几部分组成。其中硬件主要包含:1、实时处理机:用于实时模型仿真计算及硬件信号采集,具备高带宽及可拓展特性,支持CAN/LIN/CANFD/以太网/FlexRay等多种车载网络通信协议;2、高精度惯导组合:连接实际车辆与仿真场景的桥梁。真实车辆的位姿信息需要从该系统获得,通过实时处理机进行解析,并转换成仿真场景软件要求的数据结构打包发送给仿真场景,从而驱动仿真系统中的车辆模型移动。结合RTK差分定位服务可达到1-2个厘米级的定位要求,保证孪生精度;3、车载供电系统:VIL系统所有硬件的“动力源”,具备便携性、大功率、多接口、长续航等特点,确保电力的稳定输出及系统的连续运行;4、固定工装:为避免车辆在测试过程中由于大转角、急加急减速所造成的设备连接失效、损坏,需通过定制化工装固定惯导设备主体、实时处理机、供电插排、视频注入板卡、超声波硬线仿真板卡等设备。在布线美观的同时可实现VIL部件及工装本体与车身内部结构的固定连接;5、图形工作站及上位机:具备高性能的图形渲染设备,用于实时运行场景仿真软件;同时通过上位机(笔记本)运行试验管理软件,进行测试系统的实时监控与测试结果的采集评价。
1.2、VIL测试系统软件组成
VIL测试系统整体由复杂交通场景仿真软件、试验管理软件、模型搭建软件等几部分组成。其中软件主要包含:
1、复杂交通场景仿真软件:根据多源异构场景库参数要求,用于真实交通场景建模、路网系统建模(异形交叉路口、转弯、坡度、超高、及路边建筑如隧道、桥梁等)、交通状况控制等;
2、试验管理软件:用于对实时处理进行相关操作,具有激励生成、数据采集以及计算通道和自定义通道换算等功能;
3、模型搭建软件:用于进行VIL系统涉及的各信号交互模块的搭建、分类、格式转换与逻辑匹配等(如WGS84坐标系与UTM坐标系的虚实映射、雷达目标字段及筛选逻辑设计)。

02、被测车辆如何满足VIL测试要求?
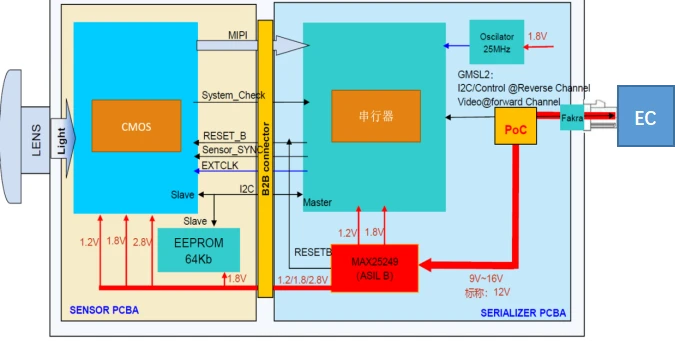
相比于硬件在环HIL仿真系统,由于场地VIL系统的被测对象是真实车辆。因此需对具体的智驾系统架构进行分析,选择合适的形式及位置对车辆原始传感器线束进行改装(破线、压线、接线、布线、内饰拆装及屏蔽处理等),在保证功能实现的前提下尽可能减少原车线束的损坏(通过定制端子保证切面整齐、复原后稳定性优良)。

根据车辆自动化等级的差异,无论是分布式控制器架构还是域控制器架构,VIL系统的实现方案无本质区别。一般断开原车感知输入后,在控制器端将传感器信号模拟器的GMSL信号、电平信号、CAN总线信号等注入即可实现闭环。
03、VIL测试如何实现传感器信号的仿真?
VIL测试基于真实车辆,已经具备了很高的真实度,但是车辆的形式环境仍然需要通过仿真来实现,而让车辆对仿真场景产生反应的重要依据就是传感器信号的仿真。其主要通过传感器信号模拟器来实现。
传感器信号模拟器主要用于车辆中摄像头、毫米波雷达、超声波雷达的感知信号模拟:
3.1、视频注入系统(SCMS)
基于黑箱的摄像头在环测试和评价系统适合于对摄像头识别算法作感知开环评价,且适合前、后视摄像头的测试。如果有多个摄像头需要同时做测试和评价,测试强光或逆光情况下控制算法的反应;测试多目、360°环视系统;图像信号级、像素级的故障注入;低延时高保真的摄像头在环仿真测试,则适合以视频注入的形式进行实现。SCMS的主要作用是将交通场景以及传感器的模型转换为视频流输出,其输出视角与内容完全由图形工作站或实时系统所运行的模型决定,SCMS只是扮演了一个视频接口转换的角色,将模型的数据转换为各种摄像头模组的接口数据格式,例如FPD-link 、DVP 并行数据、LVDS等。
3.2、超声波硬线仿真系统
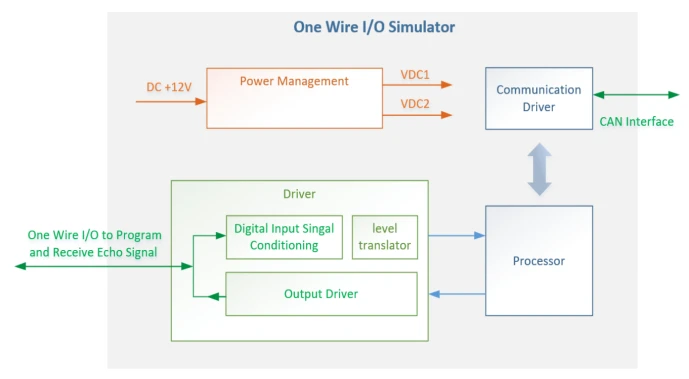
超声波雷达主要有APA、UPA两种,用对车位检测和泊车实现。其仿真系统一般分为断探头仿真与硬线电平仿真,考虑到车辆运行过程中系统的稳定性(震动、位移等),VIL系统中一般采用后者。
基本原理是接收复杂交通场景仿真软件中超声波雷达模型发送的CAN信号(虚拟目标物的距离信息及探头ID等),根据仿真的目标距离,加入可控制的时间延迟计算后直接发送物理级电平信息至控制器端,从而实现对超声波探测距离的模拟。
3.3、毫米波雷达总线仿真系统
根据雷达的测距原理,雷达回波模拟器方案无法在场地VIL系统中使用,通用方法是通过CAN总线将雷达传感器探测以及计算的毫米波雷达信号通过模型计算并通过私有总线发送给ADAS系统,以验证安装有毫米波雷达传感器的ADAS系统的功能算法。
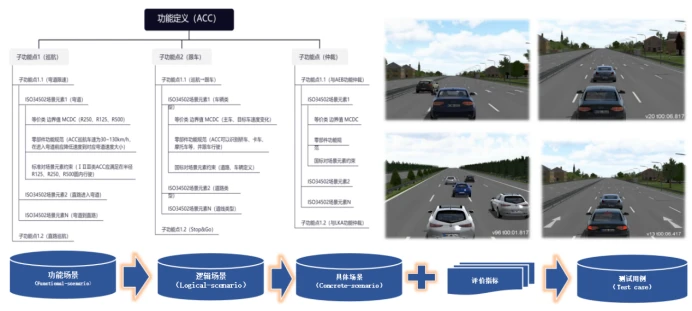
3.4、VIL测试评价体系
场地VIL系统致力于缩小HIL仿真测试和实车测试之间“性能差距”,“习题集”场景库至关重要。一般需要根据车辆的被测功能要求,结合实际采集的自然驾驶数据、标准法规数据(ISO、NCAP、CCRT)、危险事故数据(CIDAS)、经验数据(项目开发工程实践)等多个维度进行考虑,用于确保测评的覆盖度、可靠性、合理性。
通过构建从数据采集/清洗/标注→多源场景库体系→XIL仿真验证的全链路应用平台,针对智能驾驶功能快速开发过程中各阶段的测试需求,形成从功能/算法-部件级-系统级-整车级的模型在环-软件在环-硬件在环-整车在环的仿真验证体系,VIL测试系统可以助力企业打造更安全、更高效、更合理的测试体系。



 广告
广告 



最新资讯
-
直播|经纬恒润:车载光通信的开发与测试
2026-01-22 18:49
-
车载光通信走向实车验证
2026-01-22 18:48
-
解析GB/T 47001-2025智能网联汽车数字身份
2026-01-22 14:48
-
解析 GB 39901-2025:轻型汽车自动紧急制动
2026-01-22 14:47
-
基于GB 24407-2025的专用校车安全技术深度
2026-01-22 14:47
