




 广告
广告





















































技术科普丨自动驾驶仿真测试场景库研究(中篇)

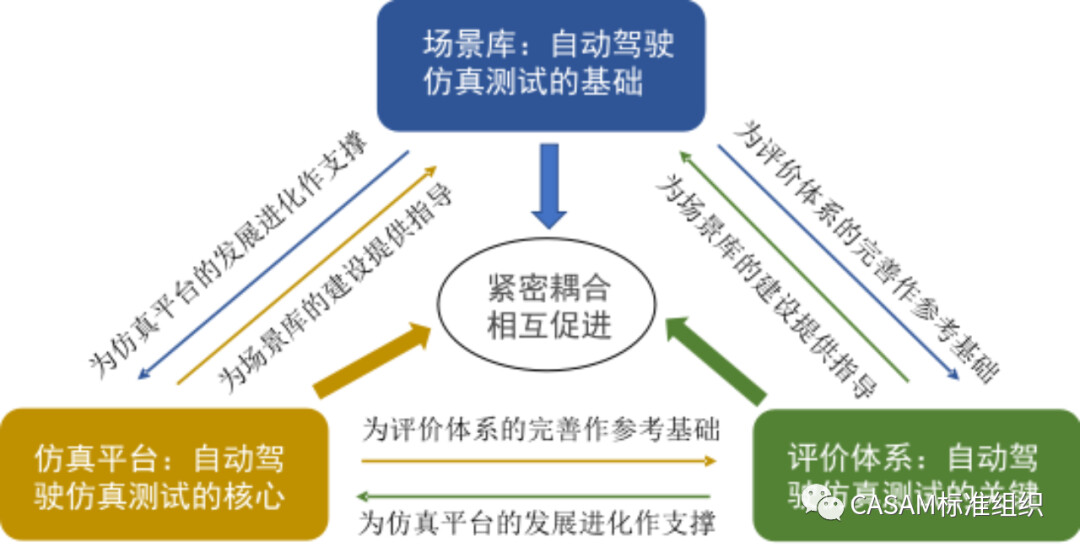
自动驾驶仿真测试有三个重要构成,分别是场景库、仿真平台以及评价体系。其中,场景库是仿真平台发展的重要支撑,是评价体系建立的参考基础。关于场景库的学问很多:场景库有哪些数据来源?场景库有哪些格式标准?让我们一起来研究!
01、自动驾驶仿真测试场景库的数据都从哪儿来?
场景库作为智能网联汽车研发与测试的基础数据资源,既是评价智能网联汽车功能安全与否的重要数据库,也是定义自动驾驶汽车等级的关键数据依据。
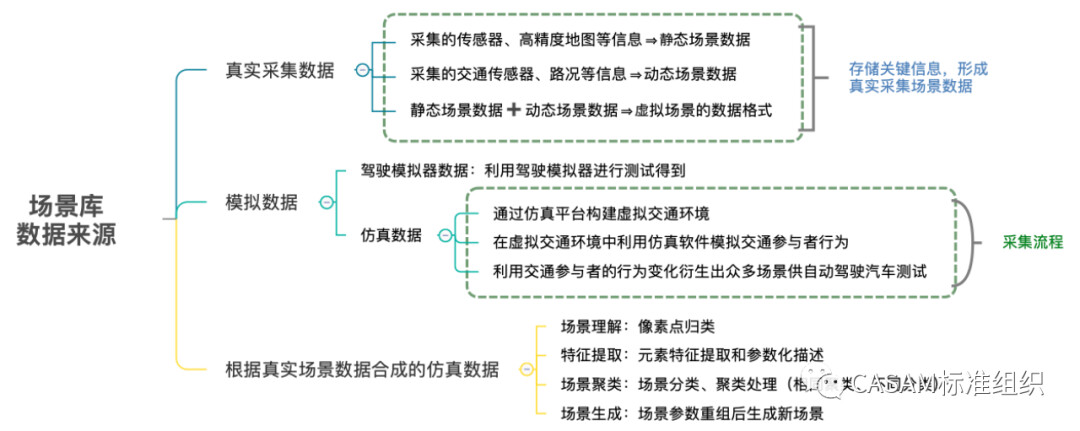
场景库的数据来源主要包括三个:真实采集数据、模拟数据、根据真实场景数据合成的仿真数据。
1)真实采集数据真实采集数据指的是现实世界真实发生的,经由车辆传感器采集到或以其他形式记录保存下来的真实场景数据,包括自然驾驶数据、交通事故数据、封闭场地测试数据以及开放道路测试数据等。由于真实场景数据包括人-车-路-环境等信息,因此为完整呈现场景内容,真实采集数据需要采集车辆的自身要素、静态环境要素、动态环境要素、交通参与者要素、气象要素等。采集流程为:
-
依据数据存储标准,将采集的传感器、高精度地图等信息转化为静态场景数据;
-
依据数据存储标准,将采集的交通传感器、路况等信息转化为动态场景数据;
-
依据数据存储标准,将静态场景数据和动态场景数据整合为虚拟场景的数据格式;
-
存储整合后的虚拟场景的关键信息,最终形成真实采集场景数据。
2)模拟数据模拟数据主要包括驾驶模拟器数据和仿真数据。驾驶模拟器数据是利用驾驶模拟器进行测试得到的场景要素信息。仿真数据是自动驾驶系统或车辆在虚拟仿真平台进行测试得到的场景要素信息。具体步骤为:
-
首先,通过仿真平台构建出高速公路、大型环岛、停车场等虚拟交通环境;
-
其次,在虚拟交通环境中利用仿真软件提供的现成模型模拟行人、机动车、非机动车等交通参与者的交互行为;
-
最后,利用不同交通参与者的行为变化衍生出众多场景,让自动驾驶车辆在不同场景中进行充分的测试。
3)根据真实场景合成的仿真数据真实采集的场景数据通过场景理解、特征提取、场景聚类、场景生成等步骤可以创建出无限的仿真场景数据。
-
场景理解:对采集到的图像的像素点进行归类,然后进行目标检测、区域标注、3D重建,未来基于机器学习的场景理解是主要趋势;
-
特征提取:对场景中的静态、动态等元素进行特征提取和参数化描述;
-
场景聚类:通过场景分类器对场景进行分类、聚类处理,相同特征信息的场景进行聚类,不同特征信息的场景进行分类;
-
场景生成:基于元素的关联关系或人工经验对场景参数进行重新组合,生成新的场景,提高场景覆盖率。
02、自动驾驶仿真测试场景库有哪些格式标准?
场景库的场景自动化测试和场景复用是自动驾驶测试的重要趋势,这些都需要标准场景文件作为支撑。ASAM(Association for Standardization of Automation and Measuring Systems,自动化和测量系统标准化协会)推出的OpenX系列仿真标准,涵盖从研发到测试,从传感器到功能模块各阶段的数据接口标准,支持整车厂、供应商、技术服务商以及自动驾驶企业的开发和测试需求,是目前业界大部分企业采用的自动驾驶和仿真场景数据格式的官方标准。
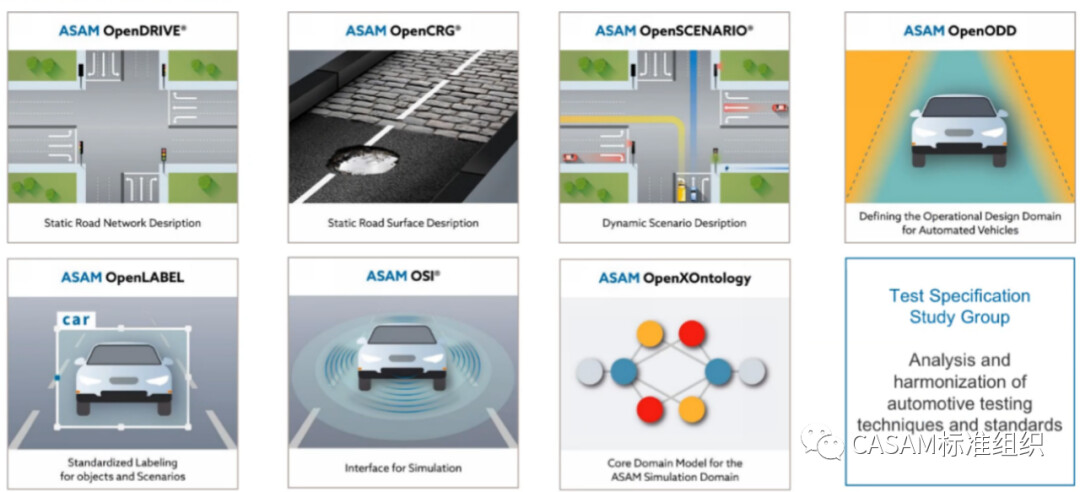
ASAM仿真格式标准(OpenX系列标准)主要包括:
1)ASAM OpenDRIVE对应静态地图场景,主要描述道路拓扑结构、车道线和道路周边的其它静态元素。第三方仿真软件生成的地图格式转化为OpenDRIVE标准格式文件后,可进行静态路网快捷编辑。OpenDRIVE将道路分为三个部分:道路参考线(reference line)、车道(lanes)和特征元素(features)。

在ASAM OpenDRIVE中,多条道路形成一个道路网,可以相互连接,整个道路网可以被认为是由单个道路相互连接组成。这些连接的路段可以支持模拟交通的驾驶逻辑,特别是为了跟随路径的目的,可以将更多的资源预留给验证和开发自动驾驶功能。ASAM OpenDRIVE已成为一个比较完善的标准,目前已经被许多知名制造商使用,用以开发AD/ADAS功能。2)ASAM OpenCRG
OpenCRG 于 2008 年由戴姆勒与奥迪、宝马、保时捷和大众共同发起,其文件格式集成在 OpneDRIVE 中,主要对路面给进行了详细描述,以便进行轮胎模拟、振动模拟和驾驶模拟。
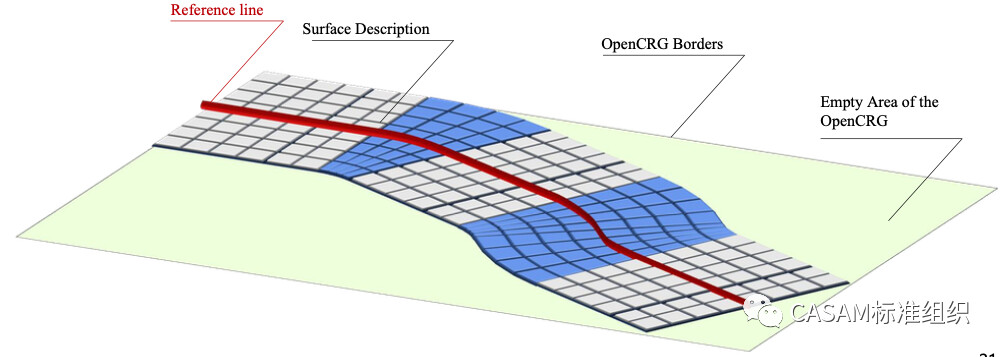
OpenCRG 项目的启动时间为 2019 年 8 月 28 日,到 2020 年 9 月,OpenCRG 1.2(用户手册和规范文件将会发布);同时,C-和MATLAB API 1.0 也将发布。ASAM OpenCRG是一种二进制文件格式,并支持MATLAB/Octave-API和C-API。Matlab/Octave-API提供了创建、操作、可视化和检查OpenCRG文件的功能,C-API只允许检查和处理OpenCRG文件。3)ASAM OpenScenarioASAM OpenSCENARIO定义了仿真世界的动态内容。例如,交通参与者的行为以及如何预期这些行为,他们之间的相互影响和环境。静态组件,例如道路网,不是ASAM OpenSCENARIO的覆盖范围,但是可被引用。
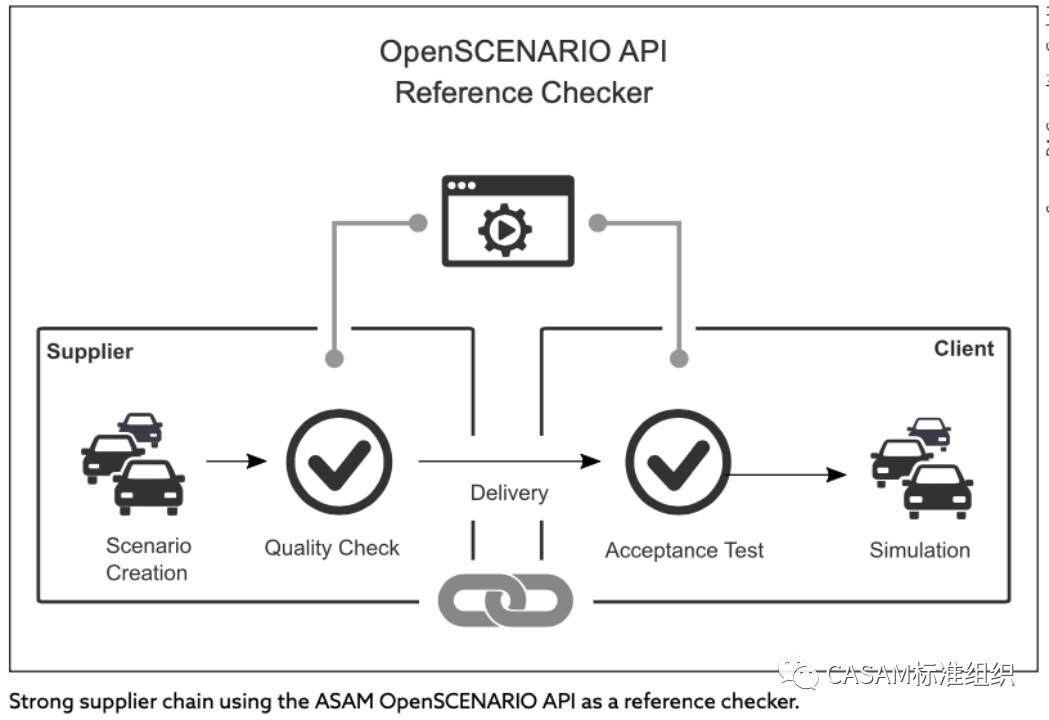
在ASAM OpenX标准中,OpenSCENARIO标准目前非常活跃,同时占有独特的地位。OpenSCENARIO工作组的总体规划如下图所示,现已开发了它的两个并行版本,即OpenSCENARIO 1.x(2021年3月发布了V1.1.0)和OpenSCENARIO 2.0(于2022年7月发布)。
4)ASAM OSIOSI 定义了一个通用的接口,用来连接自动驾驶功能的开发和各种自动驾驶模拟框架,以实现兼容性,以期做到使任何自动驾驶功能与任何仿真工具连接,同时能够集成各种传感器模型。
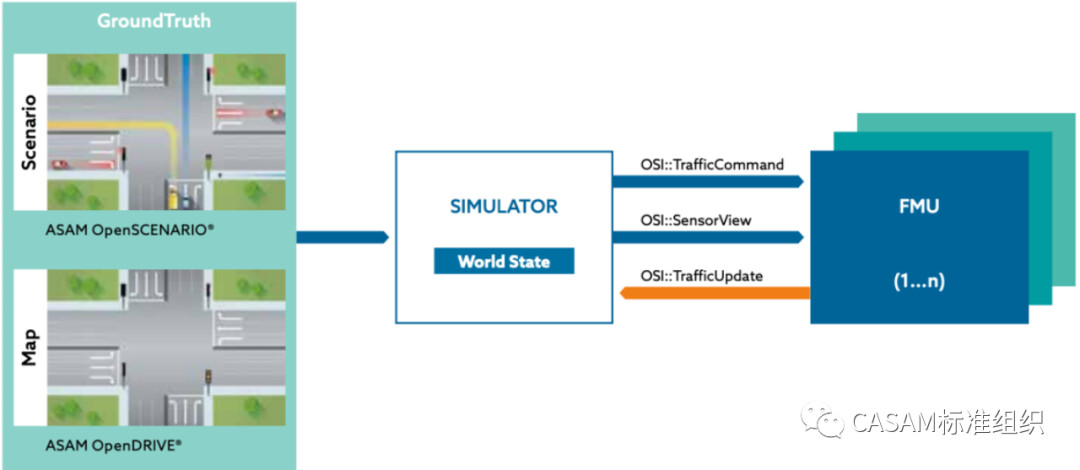
为了让功能开发者更方便地使用仿真技术,功能开发框架之间的仿真环境必须依赖于通用接口。ASAM OSI可以为自动驾驶功能和驾驶模拟的多样性提供框架,它允许用户通过标准化接口,连接任何自动驾驶功能和任何驾驶模拟器工具。OSI简化了集成性,因此增强了虚拟测试的可访问性和实用性。如所示,ASAM OSI最初是一种通用的数据交换格式,符合ISO 23150逻辑接口的接口,用于连接虚拟环境中自动驾驶功能的传感器和场景环境。5)ASAM OpenLABELASAM OpenLABEL 是国际首个关于感知数据标注的标准,定义了对象和场景的标注格式和标注方法,提供了一个关于如何使用标签方法和定义的指南。ASAM OpenLABEL还将通过增强标记动作、意图和对象之间关系,提供在场景中(一个时间点/帧)以及跨多个场景标记对象的方法。
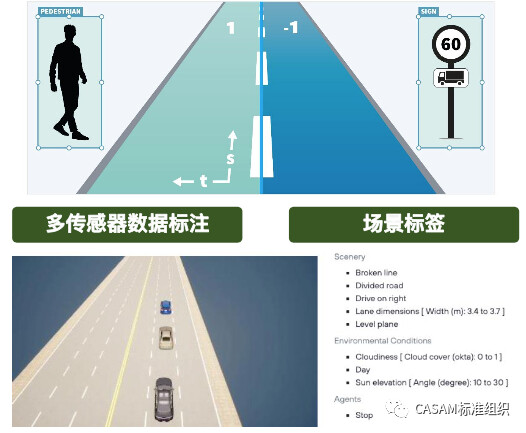
ASAM OpenLABEL格式可为不同类型的数据管理提供相对应的标记方法,包括二维和三维边界框、三维边界框的旋转、图像和点云的语义分割等。这些语义分段可以是实例类、单个/多个类、部分类或完整类。在格式方面,ASAM OpenLABEL将以JSON格式表示,并将指定哪些坐标系用作标签的参考,可以很容易地由工具和应用程序进行解析。
- 下一篇:电磁兼容检测领域设备期间核查指南
- 上一篇:将“不安全”场景转化为“安全”场景



 广告
广告 



最新资讯
-
使用 HEADlab 测量电流
2026-01-23 17:13
-
奇石乐持续推进全球碳中和战略
2026-01-23 16:47
-
吉利汽车,新公司落户湖北!
2026-01-23 16:12
-
直播|车载光通信技术路线及测试挑战
2026-01-23 13:05
-
重磅!工信部明确新车准入须开展30000km可
2026-01-23 13:05
