




 广告
广告





















































将“不安全”场景转化为“安全”场景

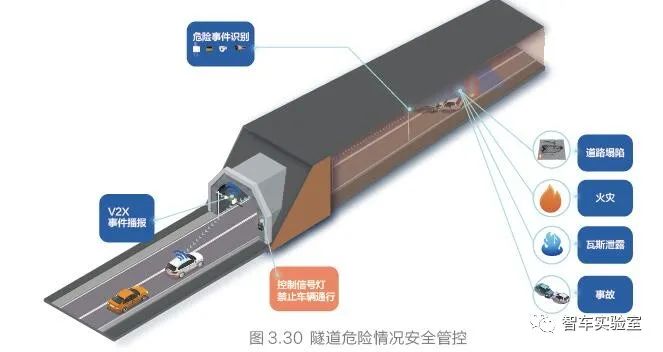
VICAD除了可以将自动驾驶“未知”场景转化为“已知”场景,还可以综合运用车路协同感知、决策规划和控制等技术,进一步实现将“不安全”场景转化为“安全”场景,提高自动驾驶安全性。如表3.6所示,自动驾驶“不安全”场景主要可以分为三类:1)交互博弈类场景安全。当车车冲突时,路端和云端作为“仲裁者”定义道路使用权的优先级,并进行协同决策规划,减少冲突引发的危险场景;当车人冲突时,应采取弱势交通参与者保护策略,给车辆下发避让、缓行或停车指令,保护行人安全。2)极端或特殊场景安全。自动驾驶车辆发生故障或出现极端场景的概率相对较低,但一旦出现时危害程度较高,可能会导致多车连续追尾、碰撞危险,通过车路协同决策规划和控制可以有效帮助车辆避免事故。3)环境安全。车辆运行环境的复杂度与车辆的安全紧密相关,环境越简单车辆越安全,反之环境越复杂,自动驾驶车辆安全挑战越大。车路协同决策规划和控制可以降低环境复杂度,提升安全性,如非机动车/行人安全治理、交通事故预防、客货运车辆管理等,实现车辆和所有交通参与者安全、秩序化运行。表 3.6 将“不安全”场景转化为“安全”场景举例
其中,交互博弈类场景安全与极端或特殊场景安全问题可通过“控车”方式实现“不安全”到“安全”,所谓“控车”是指通过VICAD直接参与CAV的决策规划和控制过程,影响车辆的驾驶行为,如图3.16所示。

图 3.16 VICAD直接控车实现“不安全”到“安全”环境安全类问题可通过“控环境”方式实现“不安全”到“安全”。“控环境”是指通过VICAD直接控制道路基础设施和设备,间接参与CAV的决策规划和控制过程,影响车辆的驾驶行为,如图3.17所示。
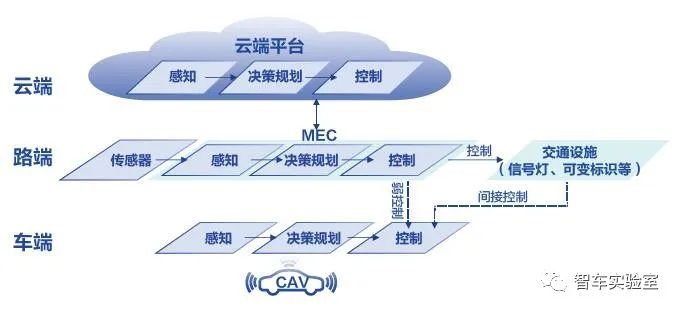
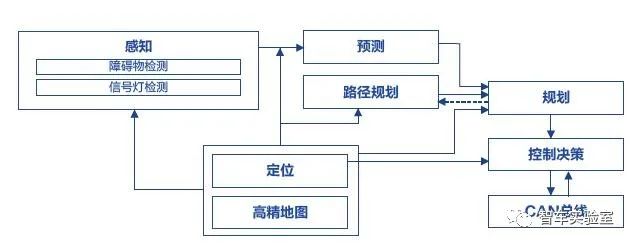
图 3.17 VICAD控环境实现“不安全”到“安全”3.2.2.1“控车”实现“不安全”到“安全”(一)总体技术原理如图3.18所示,在典型的自动驾驶系统中,除了感知、预测和定位模块或系统外,还包括路径规划(Routing)、行为决策(Decision)、运动规划(Planning)和控制(Control)等一系列模块,VICAD在协同感知基础上,可以进一步参与自动驾驶的决策规划和控制,实现动态路径规划、协同决策规划和协同控制三个层次深度协同。
- 下一篇:电磁兼容检测领域设备期间核查指南
- 上一篇:让自动驾驶更安全,远高于人类驾驶水平



 广告
广告 



最新资讯
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
