




 广告
广告





















































车载传感器——浅谈车载毫米波雷达

随着智能驾驶时代的到来,车载传感器也即将进入快速发展时期,毫米波雷达因具有穿透力强(不受烟、雾、灰尘影响)、全天候全天时、精确度较高、体积小、性价比高等特性,已成为当前L2及以上智能驾驶汽车的标配。国家智能网联汽车(长沙)测试区旨在打造国内领先的智能网联汽车专业检测机构,成为智能网联汽车行业测试服务基础支撑平台。测试区拥有高速、城市、乡村、越野等多种道路场景模拟测试区及集群测试场,为毫米波雷达相关企业提供专业高效的测试评价服务和丰富的测试场景,满足大批量测试需求。(以下部分内容转载自 汽车ECU开发,侵删)
毫米波雷达原理
毫米波雷达是使用天线发射毫米波(波长1mm-10mm),通过处理回波测得汽车与探测目 标的相对距离、速度、角度及运动方向等信息的传感器,频率范围为(30-300)GHz。

但是由于雷达频率受各国政府严格管控,因此车载毫米波雷达的应用频段主要集中在24G、60G、77G、79GHz这几个频率的应用。
毫米波雷达分类
按辐射电磁波的方式不同,毫米波雷达分为脉冲类型和连续波类型,连续波类型又细分为CW(恒频连续波,只能测速不能测距)、FSK(频移键控连续波、可探测单个目标的具体和速度)、FMCW(调频连续波,可对多个目标实现测距和测速,分辨率高,技术成熟)。
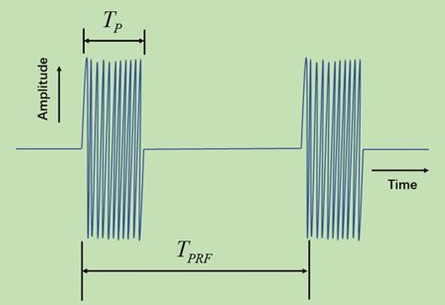
脉冲雷达工作原理:脉冲工作方式可以将发射波和回波区分出来,同时可对比接收回波与发射信号中不同频率,利用多普勒效应得到目标的速度信息。也可以利用回波的时间信息得到距离信息。该方式数据处理原理较简单,但由于单次脉冲需求功率大,存在间歇期的盲区,在当前毫米波雷达产品中未被采用。
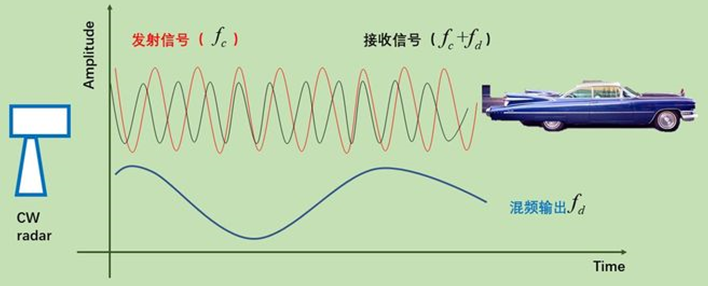
CW恒频连续波雷达工作原理:对接收信号与发射信号的混频可以得到目标的多普勒频率进而得到速度信息。但是由于是连续波,不能测得发射信号的来回时间。因此CW雷达不能进行距离测量,只能实现对目标的速度测量。
FMCW雷达工作原理:FMCW雷达的发射频率随时间变化呈线性变化,这样在发射信号里面可携带时间信息。高频信号由压控振荡器产生,通过功率分配器将一部分经过额外放大后馈送至发射天线,另一部分耦合至混频器,与接收的回波混频后低通滤波,得到基带差频信号,经过模数转换后送至信号处理器处理。这样得到的信号既能得到时间信息,也可以得到多普勒效应特征点。因此可同时测量速度和距离信息。
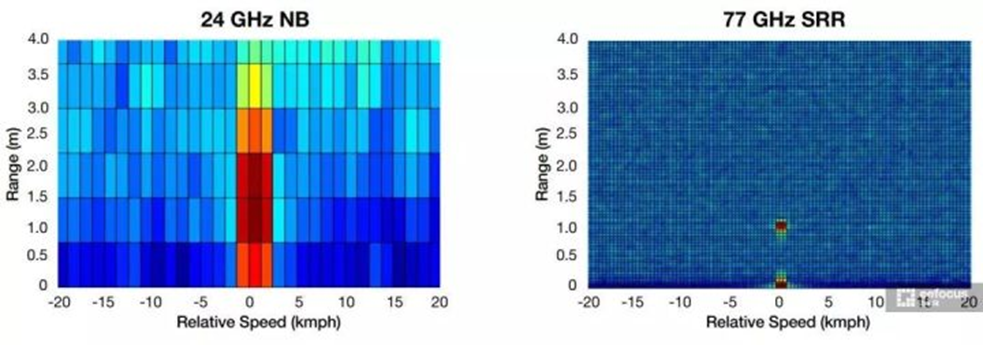
按辐射电磁波的频率不同,车载毫米波雷达主要有24GHz、77GHz、79GHz三种。其中,24GHz主要用于短距离(60m以内),短距离雷达被称为SRR;77GHz主要用于长距离(150m-250m),长距离雷达被称为LRR;79GTTz通常用于中短距离,其中中距离雷达被称为MRR。
24GHz (2019年全球市占率54.35%):探测距离60m,主要应用于BSD (盲点监测)、T.CA (变道辅助)、PA (泊车辅助),目前为毫米波雷达中最常见产品。根 据美国FCC和欧洲ESTI规划,24GHz的宽频段(21.65GHz-26.65GHz)将于2022 年过期,欧洲和美国都已经宣布将逐步限制和停止24GHz频段在汽车雷达中的使 用。
77GHz(2019年全球市占率45.52%):探测距离100-250m,主要应用于ACC(自适应巡航)、AEB (自动紧急制动)、FCW (前方碰撞预警)等。由于相对 24G11Z产品体积更小、识别率更高,77GHz雷达正逐步替代24G11Z方案成为主 流产品。
79GHz(2019年全球市占率0.12%):探测距离可达200米,具有高探测范围和 角度精度。主要应用于BSW (盲区警告)、LCA、FCTA (前方交叉路口警报)等。79GHz雷达在分辨率、探测距离等方面可与77GHz产品比肩,需求有望不断攀升。工信部已于《汽车雷达无线电管理暂行规定(征求意见稿)》提出将(76- 79)GHz频段规划用于汽车雷达,但79GHz产品目前在中国尚未开放民用。
毫米波雷达的数据传输
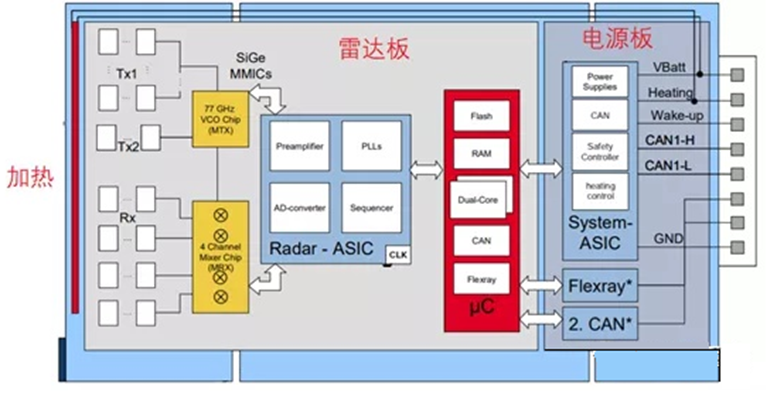
以博世第四代MRR为例。雷达芯片自带数据处理能力,其一般有两种信号传递方式:
1.雷达直接给出提供32个原始目标,并且告知是静止还是运动目标。在这种模式下,需要主机厂自行结合视觉算法,来判断静止物体是汽车还是其他障碍物。2.雷达控制器基于毫米波的RCS反射面积和不同帧之间反射点情况,从32个原始目标中筛选出功能安全目标——即车辆需要做出反应的目标。
因此在这两种模式下传递的信号其实已经属于低数据量的特征点,故雷达与控制器之间的数据传输采用传统的CAN通讯。
毫米波雷达的优缺点
本文开头大致描述了毫米波雷达的具有的优质特性,但是缺点也难以避免,比如毫米波雷达无法提供高度信息,空间分辨率一般,并且严重的是,由于毫米波雷达的工作方式是利用多普勒效应来检测目标的,这就会导致对于静态目标产生漏检的情况,导致自动驾驶系统做出错误的决策。
另外由于毫米波雷达芯片基本被博世、NXP、TI垄断,其中博世和NXP又不对外供货,导致国内企业基本用的是TI的芯片,这也导致同质化竞争特别严重,另外在PCB基材以及结构布局对雷达性能很敏感,基本上这一块也受国外企业垄断,比如罗杰斯等。
毫米波雷达的发展方向
1.前向MRR和LRR往高频率77/79GHz方向演化。
2.毫米波雷达对方位的探测,利用的是波长短的特性,使用阵列天线来构成窄波束,实现一个雷达覆盖较宽的方位角。
3.提高雷达频率,在保持相同增益的条件下,天线孔径可随波长的平方倍数减少,对应雷达尺寸也可降低。
4.同时孔径减小可提供更窄的波束,雷达的速度,位移,物体尺寸的探测精度可大幅度提高。



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
