




 广告
广告





















































自然驾驶场景提取浅谈
2021-12-31 00:28:05· 来源:国汽智联

内容导读近年来,随着自动驾驶技术的研究深入和高级辅助驾驶功能的广泛应用,汽车产业步入智能化和网联化的发展阶段。越来越多的汽车厂商将研发重心转移到L2级和
内容导读
近年来,随着自动驾驶技术的研究深入和高级辅助驾驶功能的广泛应用,汽车产业步入智能化和网联化的发展阶段。越来越多的汽车厂商将研发重心转移到L2级和L3级车型的开发,特定区域下的L4级别的自动驾驶车辆也在逐渐落地。自然驾驶场景,顾名思义就是人类驾驶员驾车行驶在道路环境中与周围交通参与者、交通基础设施等产生交互的真实场景。自然驾驶场景数据来源于真实世界,数据多样性高,可为感知识别算法的训练和测试提供基础数据,为决策和控制算法的开发提供逻辑思路。本文将对自然驾驶场景提取进行简要分析。
1、为什么要进行自然驾驶场景提取
自然驾驶采集的场景一般都可被认为是高频场景。高频场景可能在测试和验证上并不如边缘场景那样可以提供明确的测试边界,但是却可为自动驾驶算法开发提供适用范围的重要参考。场景数据采集车在驾驶过程中的路径选择、驾驶习惯、对交通法规的应变反应等可为决策算法的研发提供参考,自然驾驶场景中面对的雨天、雪天、逆光、道路拥堵等诸多情况可为感知算法的开发和训练提出参考等。
2、自然驾驶场景面临的问题
采集数据质量的高低和场景提取参数的界定是影响自然驾驶场景质量的两个重点。
自然驾驶场景的原始数据来源于场景数据采集车,因此直接受到传感器设备质量的影响。不同类型传感器生成的目标列表方式有较大的差别,有的传感器直接能够输出目标列表,比如智能摄像头和毫米波雷达;而有的传感器则需要经过后处理才能得到目标列表,比如激光雷达。另外,采集数据的格式也无法做到完全统一,因此需要制定统一的标准方便提取软件的后续处理。场景提取参数的界定也是个难题,需要结合自然驾驶场景服务的功能开发类型制定参数范围。如果设置的过于苛刻,则无法提取足量的场景;如果设置的过于简单,则可能会生成很多无效场景。
3、自然驾驶场景的提取方法浅谈
现阶段提取场景的方法主要可以分为两类,人工提取和自动提取,两类提取方法可以组合使用。人工提取是由标注人员通过场景标注工具查看采集的场景片段,按照自然驾驶场景的定义进行场景片段的截取,可按照PEGASUS场景描述六层模型进行完整描述,缺点是成本比较高;自动提取是通过制定场景提取的规则或者采用机器学习的方式,对海量的数据进行快速的场景自动提取,缺点是提取的准确率和召回率比人工提取差。

图1 自然驾驶场景提取流程示意图
4、现阶段成果及应用
国汽智联已完成对自然驾驶场景的人工提取软件和基于规则的自动提取工具的开发。人工提取软件设计了可视化视频窗口界面,可以方便地进行场景片段的截取,并按照PEGASUS的六层场景描述模型进行描述。基于规则的自动提取工具应用Spark架构,基于选定参数和设定范围对海量数据进行快速提取。
当自然驾驶场景被提取出来之后,再通过场景分割环节就可以得到批量的自然驾驶场景数据片段。自然驾驶场景数据片段既可以用于场景还原生成OpenX文件,还可以应用于数据分析为自动驾驶功能设计提供参考,也可以应用于感知数据集的建设,支持感知算法的训练与测试。
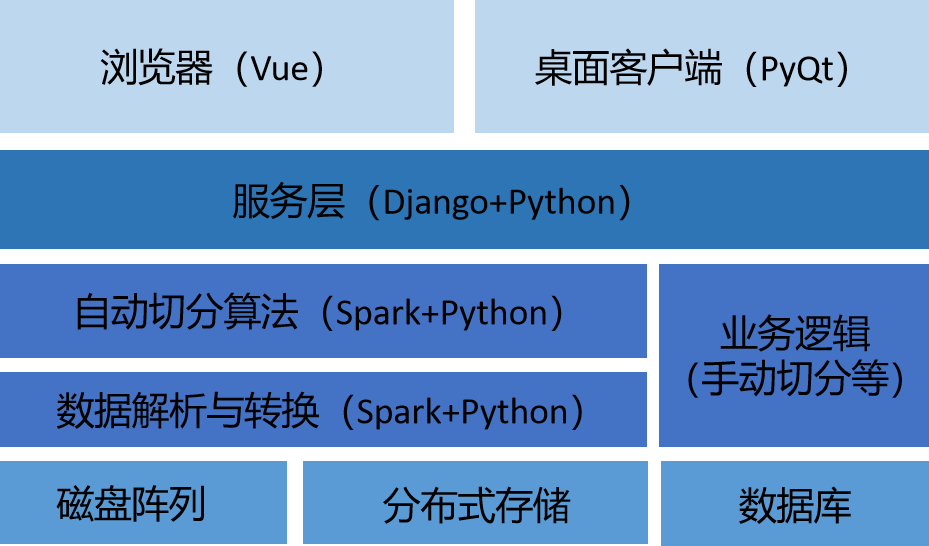
图2 国汽自研自动切分工具架构设计

图3 国汽自研自动切分工具数据审核界面



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
