




 广告
广告





















































量产ADAS项目在C-NCAP2021法规测试关键问题分析
2021-12-31 00:26:00· 来源:智车科技

导读C-NCAP是为了促进中国汽车产业的健康发展,加速国内汽车市场的全球化进程,中国汽车技术研究中心于2006年3月2日正式发布的首版中国新车评价规程(C-NCAP)。
导读
C-NCAP是为了促进中国汽车产业的健康发展,加速国内汽车市场的全球化进程,中国汽车技术研究中心于2006年3月2日正式发布的首版中国新车评价规程(C-NCAP)。C-NCAP以更严格、更全面的要求,对车辆进行全方位安全性能测试,包括乘员保护、行人保护、主动安全等,从而给予消费者更加系统、客观的车辆安全信息,促进汽车企业不断提升整车安全性能。
1 C-NCAP概述

C-NCAP主动安全路线图草案
C-NCAP的主动安全路线图从2020年开始,分为甲乙丙丁四类,其中甲类包括了车间安全辅助、行人安全辅助及两轮车安全辅助,乙类包括侧方辅助、车道辅助,丙类包括低速车用安全辅助,丁类包括交通标识辅助及驾驶员监控。2020年时,主要评价功能在于盲区车辆报警、车道偏离预警;2021年,功能增加到针对两轮车的盲区报警及车道保持辅助,另外甲类的场景也增加了AEB的夜间横纵向场景;2022年,将增加紧急车道保持技术的评价;2023年,增加了AES本车道内辅助技术的评价指标。
可以看出,C-NCAP对于车辆的主动安全性是一场较严格的考验,也只有通过这场考验的汽车厂商,才能让消费者放心乘坐。其实,汽车的安全性能是相对的,C-NCAP就好比一场考试,所有参与考试的考生均采用同一份试题,最后的得分结果能够客观反映车辆在特定条件下的安全性能,体现了公平性。针对2021版的具体评定标准来看,综合得分率高于92%才能获得C-NCAP的五星评价,本文选取基于宏景智驾C-NCAP2021五星+(主动安全)案例,分析目前C-NCAP测试的主要难点及场景,进而分析这几种难点产生的原因及解决方案。
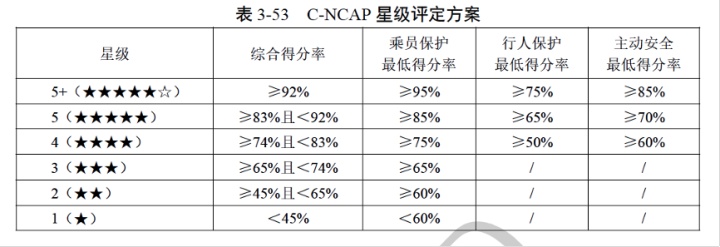
2021版的具体评定标准
2 关键问题分析
宏景智驾高性价比系统级项目,智能摄像头产品Smartcam,宏景全栈自研,最高可搭载1个摄像头,3个毫米波雷达,摄像头感知功能包括车道线检测、车辆检测、行人检测、交通标识检测、可行驶区域检测等 丰富场景;再结合摄像头与毫米波雷达的深度融合,满足L2 ADAS功能,如ACC,LCC,TJA等,应用场景广泛。
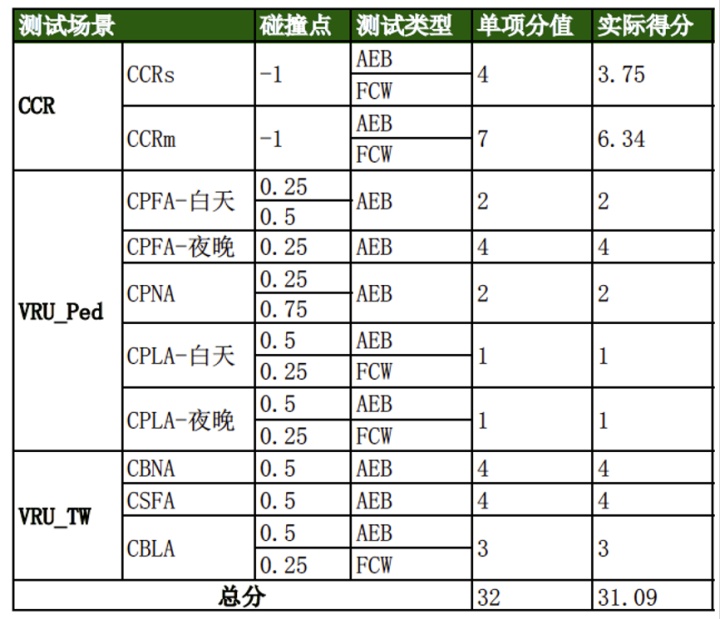
宏景Smartcam系统特点可概括为:国产化视觉感知和毫米波雷达感知+国产化底盘制动系统。首先来看此系统(传感器搭配为1个前视摄像头,1个前向毫米波雷达)在C-NCAP2021中的实测得分情况:
针对C-NCAP2021的场景测试,主要存在的难点有以下几个方面:
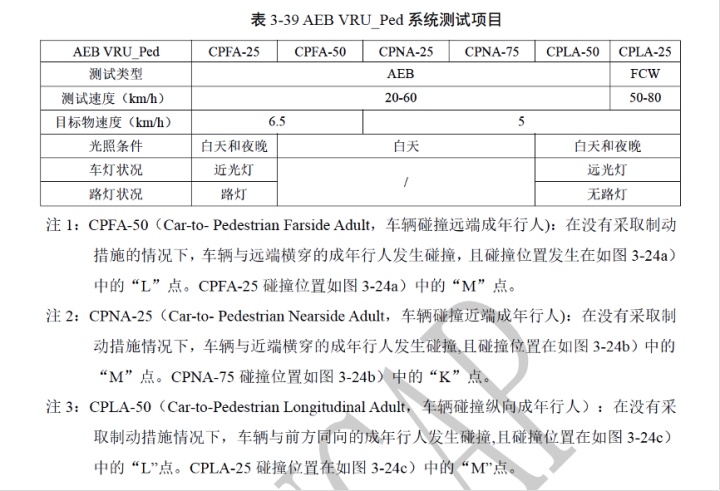
1)CPNA-25%碰撞点50Kph - 60Kph
该场景的主要特点是目标运动的距离短,速度低。CPNA场景,加速距离为1m,匀速到50%碰撞点距离为3m,到25%碰撞点的距离约为2.55m。匀速时间约为1.836s。在50Kph和60Kph的测速场景时,由于自车车速过快,系统需要准确识别到目标,判断目标将出现在自车路径上,方可触发AEB功能。若目标识别不稳定或感知上相机和雷达对目标识别到的属性差异较大,导致形成的融合目标出现出现过晚,从而出现AEB作动不及时的情形。
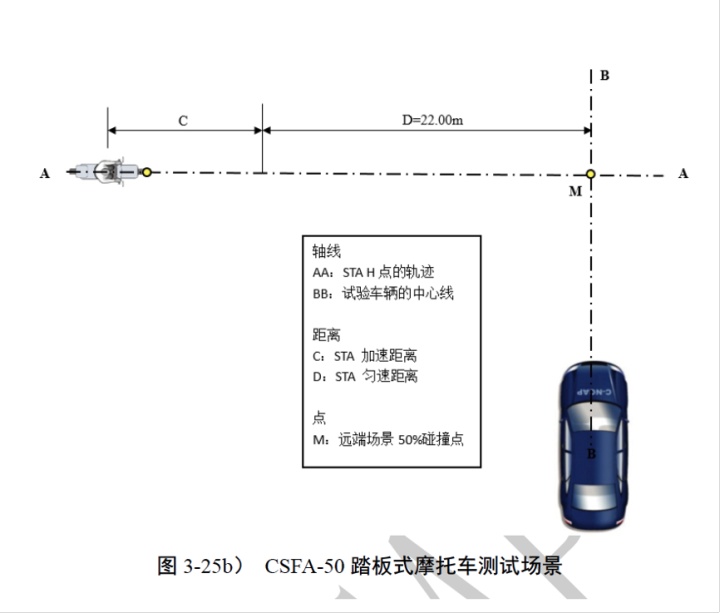
2)CSFA场景
该场景主要特点是目标的速度快,且横向距离远。匀速距离长达18m(CNCAP早期版本为22m)。电瓶车易出现在相机的边缘。对于CSFA 50Kph及60Kph,是一个挑战。
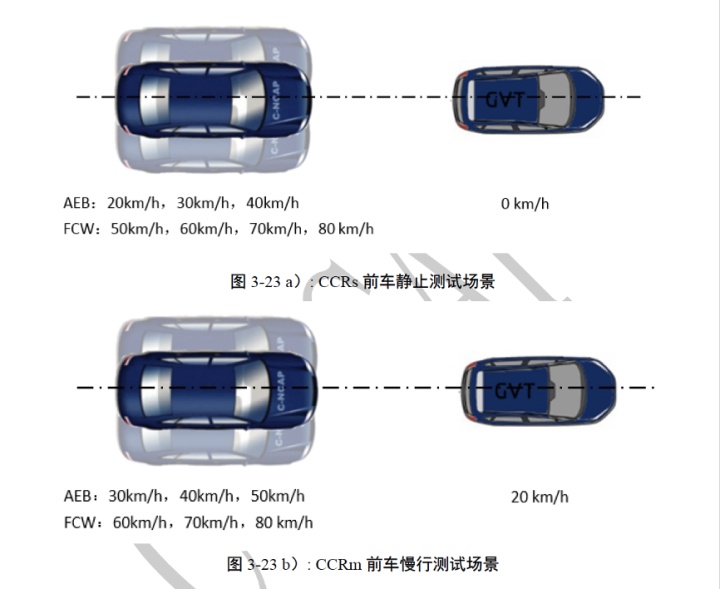
3)CCRs FCW高速场景
对于CCRs FCW 80Kph场景,出于功能安全的考量,执行器对主动安全触发的制动,会做出速度降低限制。若该场景下需拿到满分,触发AEB的ttc时间需要放大,即使AEB因速度降退出后,还可通过驾驶员踩下的-4m/s2的减速度,在车辆到达碰撞点之前刹停,从而避免碰撞。但ttc的调整,会增大实车道路上FCW的误触发,需综合考量。
针对上述的难点问题,分析主要原因有以下几点:
1)对于CPNA场景,50Kph及60Kph场景不得分主要原因在于目标的识别。
在当前场景下,雷达的控制策略无法给出目标的类型,也无法给出可用于识别是否为“不可通过性目标”的高置信度。其需要行人运动起来后,再经过一段时间的确认,雷达才给出目标的类型或者高置信度的“目标存在概率”,融合算法需要基于此信号和相机给出的目标做融合。同时,雷达给出的目标横向速度收敛到目标速度慢,需较长时间收敛。由于CPNA-25%场景,目标的运动距离短,融合目标越早给出,越有利于AEB算法判断碰撞风险。因此该因素成为这场景下50Kph-60Kph得分不稳定的主要因素。
2)CSFA场景:
针对CSFA场景,两轮车易出现在相机的FOV边缘,相机首次看见目标时,若给出的纵向距离偏近,相机需要较长时间进行收敛。加大了和融合目标融合在一起的难度。
3 解决方案
分析了上述的难点与原因,我们可以得出几种针对性解决方案:
1)针对第一个问题,算法做出如下调整:
针对雷达目标/“不可通过性目标”的属性给出晚的问题,结合场景数据,发现雷达给出的属性中,运动状态较目标/“不可通过性目标”的属性给出早。融合算法基于此信号进行目标融合,可节省时间。横向距离上,融合算法加大相机输出的横向距离的权重。
2)针对第二个问题,修改融合条件中纵向位置的偏差阈值:
修改融合条件中纵向位置的偏差阈值,在较远区域,将阈值适当放大,在较近区域,阈值适当放小。且纵向距离的测距是雷达的优点,融合结果更偏重于雷达的纵向距离。以此解决相机纵向距离收敛慢导致融合晚且距离偏差大的问题。
3)如何保证改动不影响道路误触发
宏景的数据采集系统,采集了相机、雷达、控制等原始数据。这些数据可以在台架上用于回灌分析。无论是相机算法做了调整,还是AEB/融合算法做了调整,都可将前期已路试过的数据进行回灌。针对回灌的结果,检验这些改动是否会带来误触发。若出现新增场景,反复迭代验证,直至误触发消除。
宏景智驾作为ADAS整体系统供应商,集成策略的优势可以弥补部分感知层面的问题。针对国产化雷达和相机的性能,融合算法会调整相应的策略,弥补诸如雷达横向速度收敛慢、相机纵向距离收敛慢等问题,确保场地性能后,进行大量的路试验证,确保了系统集成策略的稳定性。
后续针对ENCAP2023需要重点关注车对行人、车对自行车、车对摩托车、车对车工况,主要挑战来CPNC白天和夜晚场景(儿童遮挡)、CPRA场景(自车转弯)、CPTA场景(自车倒车)、CCFtap(自车转弯)、CMFtap(自车转弯)等场景。其中自车转弯工况:宏景现有策略已可满足。倒车工况对于1R1V来说,需增加配置以实现。目标遮挡的工况,传感器较难检测出目标,无法进行有效的制动,难点在于自车高速的情况。针对ENCAP2023 AEB部分,经过内部预估,可实现得分率大于70%。
总的来说,技术国产化是未来国内厂商所着力发展的目标,只有将核心技术牢牢握在自己手中,未来才不会在核心竞争中出现“卡脖子”的情况,核心竞争力的国产化必将成为未来几年中国企业的主要关注点及主旋律。



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
