




 广告
广告





















































基于非线性扰动观测的商用车ESC自适应滑模控制研究
2021-09-15 01:15:30· 来源:汽车制动之家

根据 Lyapunov稳定性理论,,选取 Lyapunov函数:

对Lyapunov函数求导,可得

定义区域Q为

由式(28)可知,对于任意 e∈R\Q,即
时,式(29)有
,这意味着非线性扰动观测器偏差e1将会收敛并一直留在区域Q内。综合式(19)~式(29),最终得到的附加横摆力矩控制器为

由式(30)可知,基于非线性扰动观测器设计的附加横摆力矩控制器仅需满足k>0,ε>0即可,而式(19)中的附加横摆力矩控制器需满足ε≥D才可保证系统的稳定性。综上所述,在满足相同控制需求的条件下,基于非线性扰动观测的附加横摆力矩控制器的符号函数增益ε可取更小的值,从而使得式(30)控制器相对于式(19)控制器而言,抖振更小,控制精度更高。
在滑模控制器中,参数k与滑模控制的趋近速度密切相关,RBF神经网络具有自适应调节能力,利用RBF神经网络控制器自适应调节滑模控制器参数k,可简化滑模控制器的参数调节过程,优化滑模控制的响应特性,减小系统抖振。RBF神经网络采用 2-5-1结构。
RBF神经网络的输入向量为
hj为隐含层第 j个神经元的输出,j=1,2,3,4,5。
c j=[cj1 cj2]为第j个隐含层神经元的中心矢量值,bj>0为隐含层神经元j的高斯基函数的宽度,其中神经网络的权值为ωj。
RBF神经网络输出和逼近误差指标分别为


通过梯度下降法对RBF神经网络权、高斯基函数宽度、隐含层神经元中心矢量值进行调节。
权值变化、高斯基函数宽度参数变化、隐含层神经元中心节点参数变化分别为
式中:i=1,2;η∈(0,1)为 RBF神经网络学习速率。
对于附加横摆力矩采用单侧制动分配,具体逻辑见表1。
表1 单侧制动车轮选择逻辑
表1中,LF、LR、RF、RR分别代表左前轮、左后轮、右前轮、右后轮。假设转向盘左转时,δ≥0,当横摆角速度逆时针变化时,ωrd和 ωr为正,Δωr=ωrd-ωr。
2.2 底层执行机构控制器
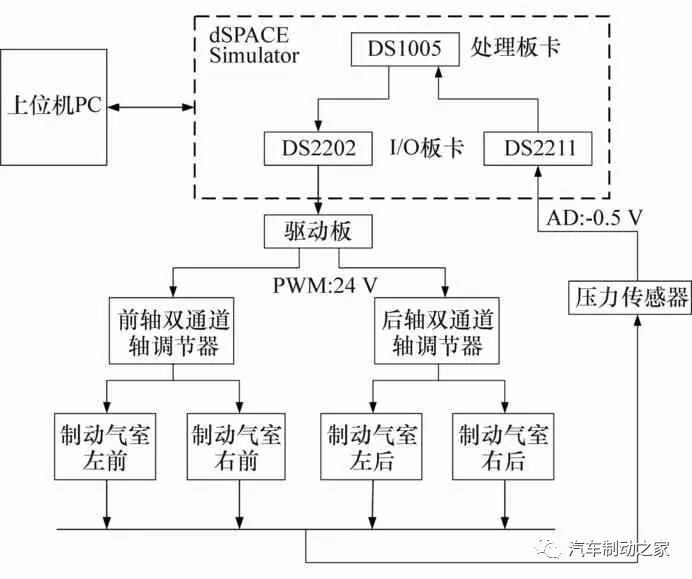
采用如图3所示的电控气压制动系统构型作为商用车稳定性控制的底层执行机构。
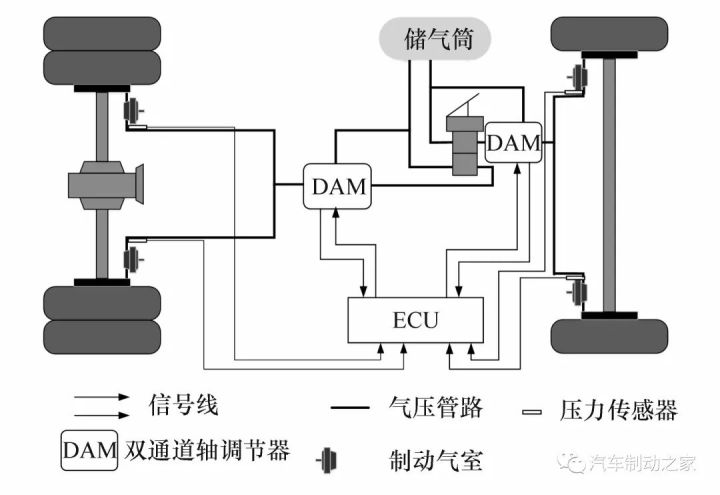
图3 电控气压制动系统构型图
电控气压制动构型的核心部件是由美国WABCO公司生产的最新一代双通道轴调节器,其原理简图如图4所示。双通道轴调节器左右两侧完全对称,主要由增压阀、减压阀、备压阀、继动阀、ECU组成。对于双通道轴调节器主要是通过控制增压阀、减压阀的通断来实现对压力的精确控制。增压阀和减压阀本质上是开关阀。
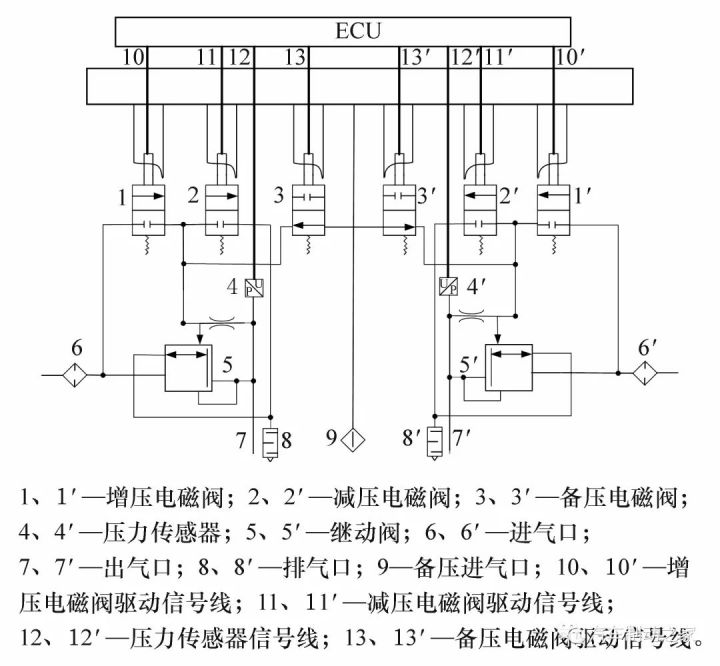
图4 双通道轴调节器原理简图
单神经元PID算法是通过对比例、积分和微分3个方面加权系数按照有监督的Hebb算法进行合理调节来实现系统控制的自适应能力,并通过输出的反馈实现权值实时最佳调整,使被控对象能够逼近目标值。单神经元PID算法结构简单,控制效果良好,是一种较好的不基于模型的算法,在实际工程中得到广泛的应用。故本文中对双通道轴调节器采用单神经元PID控制算法。



 广告
广告 



最新资讯
-
联合国法规R94对乘员防护的工程化约束
2026-04-01 12:23
-
联合国法规R93对车辆前下部防护装置的工程
2026-04-01 12:23
-
越野出行指南针评价结果发布【方程豹 豹5】
2026-04-01 12:17
-
招商车研助力长安汽车在重庆获批L4级自研Ro
2026-04-01 09:48
-
是德科技推出面向高校的半导体实践教学实验
2026-04-01 09:03
