




 广告
广告





















































越野伸缩臂夹抱机底盘驱动系统设计
2021-09-15 01:13:04· 来源:焉知智能底盘

TH4008 型越野伸缩臂夹抱机主要用于圆包物料田间野外的搬运作业,需在地形条件极为恶劣的环境下正常工作,因此,对底盘的地形适应能力和自身驱动能力要求较高。
TH4008 型越野伸缩臂夹抱机主要用于圆包物料田间野外的搬运作业,需在地形条件极为恶劣的环境下正常工作,因此,对底盘的地形适应能力和自身驱动能力要求较高。夹抱机底盘要具备四轮驱动、四轮转向、蟹行等多种转向方式以及具备强劲的驱动力才能完成野外作业。
1 TH4008 型夹抱机整体结构布置
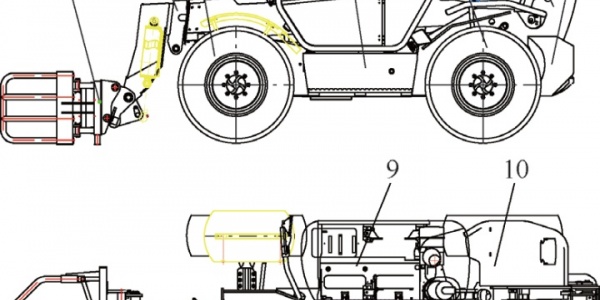
TH4008 型越野伸缩臂夹抱机整体结构布置采用左右基本对称的形式,见图1。发动机舱采用独立模块式结构,整体布置在整机的右侧,舱内布置发动机、蓄电池及散热器;液力变矩器、变速箱以及齿轮泵布置在车架中部;驾驶室总成和油箱总成上下布置在整机的左侧;伸缩臂纵向布置在整车中心,位于变速箱上方,其与车架铰接点位于整车后部,且位置较低,保证了驾驶室具有良好的视野。配重安装在车架后部,前桥总成与车架刚性联接,后桥总成与车架铰接,整机结构设计紧凑,重心位置较低,稳定性好。
发动机横向置于整车右侧,通过传动轴连接90°角传动箱,角传动箱置于车体中部,向前与变矩器和变速箱直联,变速箱将动力向前和向后分别传至前后驱动桥,构成底盘行走驱动系统;角传动箱向后直联液压泵,液压泵为转向系统、制动系统和工作系统提供液压动力。工作系统实现伸缩臂的伸缩、变幅和抱夹的倾翻、夹抱等动作,动力传动路线如图2 所示,底盘驱动系统布置结构如图3 所示。该方案的优点是发动机横置,使整机轴距最短,同时可提高整机的灵活性,并且动力系统的布置结构紧凑、简单,维护保养较方便。缺点是发动机需要通过角传动箱与液力变矩器连接,多了一级传动部件。
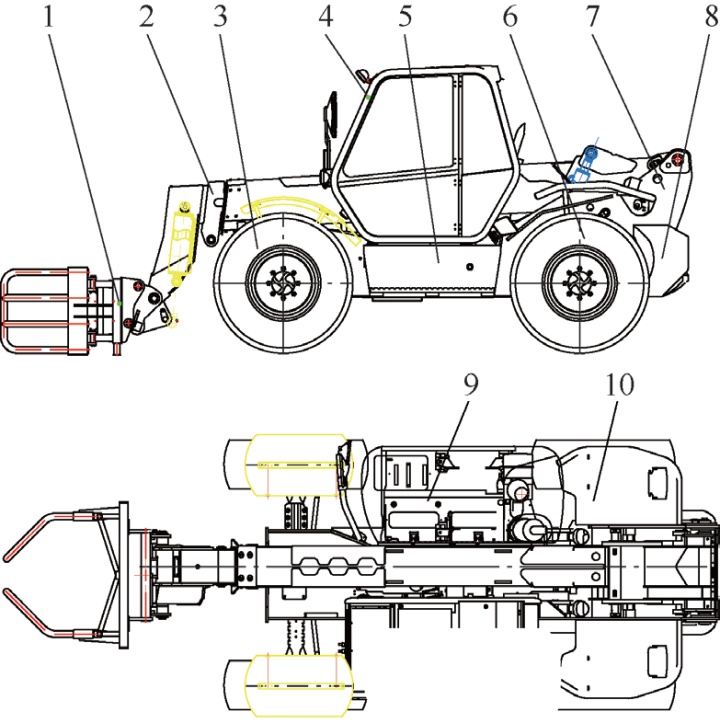
1. 夹抱属具总成 2. 伸缩臂总成 3. 前桥总成4. 驾驶室总成 5. 油箱总成 6. 后桥总成7. 车架总成 8. 配重 9. 动力舱总成 10. 车罩总成
图1 TH4008 型越野伸缩臂夹抱机整体布置图

图2 动力传动路线图
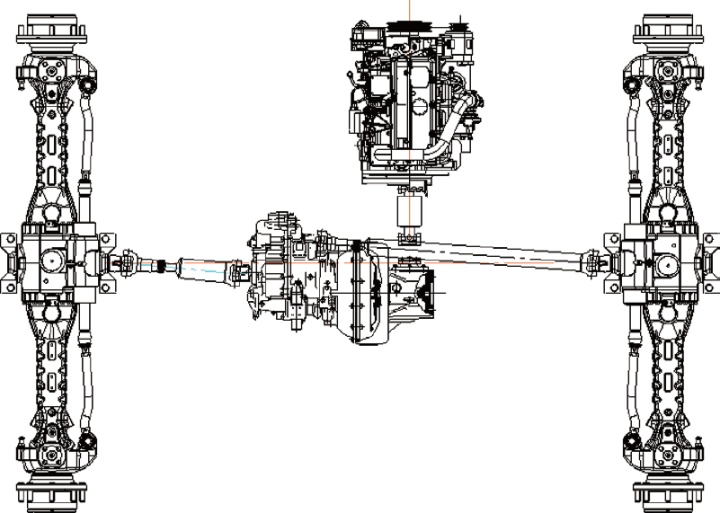
图3 底盘驱动系统结构布置图
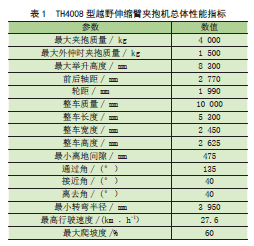
TH4008 型越野伸缩臂夹抱机主要技术参数如表1所示。
2 底盘驱动系统零部件选型
2.1 动力参数计算
2.1.1 驱动力计算
根据TH4008 型越野伸缩臂夹抱机设计指标,夹抱机自重为M C,最大工作负载质量为M f,应能在坡度为60% 的坡道上满载起步和行驶。附着系数μ = 0.8 , 起步阻力系数α =0.04,行使阻力系数(混凝土路面) β=0.02 。
夹抱机在满载和空驶状态所需牵引力和附着力可按以下几种状态计算:
1) 伸缩臂夹抱机和负载在60% 的坡道上起步所需的最大牵引力( 1 γ 为坡度系数)
伸缩臂夹抱机和负载在坡道上能发挥的最大附着力( 2 γ 为坡度系数)

伸缩臂夹抱机有足够的附着力。
2) 伸缩臂夹抱机在水平路面上匀速行驶时的阻力

伸缩臂夹抱机在水平路面上能发挥的最大附着力

伸缩臂夹抱机有足够的附着力。
2.1.2 牵引力与爬坡度的计算
1) 空载牵引力的计算
式中:e M 为发动机最大输出扭矩, 1 i 为变速器一挡速比, 0 i 为前后桥速比, k 为变矩器变矩系数,η 为传递效率,R 为轮胎工作半径。
2) 额定负载牵引力的计算
式中:F 为空载牵引力,G 1 为额定负载时的整机质量,G 为空载时的整机质量。
3) 最大爬坡度的计算

式中:F 为额定负载牵引力;G 为额定负载时的整机质量;β 为行驶阻力系数。
以上是在额定负载时伸缩臂夹抱机的最大爬坡度。
2.2 发动机选型
1)行走驱动功率计算
行走驱动最大功率发生在满载时在最大坡度上匀速行驶时,伸缩臂夹抱机在60% 坡度上满载以最高2 km/h 速度行驶时伸缩臂夹抱机所发挥的驱动力为F Tmax,行走驱动功率

2)总功率计算
伸缩臂夹抱机发动机总功率N e 等于行走驱动功率、液压系统功率及附件功率(发电机、风扇、等消耗的功率)之和,即

式中: q N 为行走驱动功率, p N 为液压系统功率, c N为附件功率。
由于伸缩臂夹抱机行驶过程中不允许操作工作装置,故在估算发动机功率时,可仅考虑行走驱动功率qmax N 。附件功率c N 可用有用功率的一个百分数表示(对于DIN 制功率可取为7%)。可用下式估算发动机功率
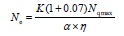
式中: K 为发动机功率贮备系数;α 为发动机的负荷系数,对于与发动机匹配良好的驱动系统,取α = 0.9;η 为传动系统总效率,取η = 0.8。
将以上数据代入上式计算发动机功率,得到整车最大需求动力,可选择75 kW 左右的发动机。
2.3 轮载分配与轮胎选型
1) 轮载分配
伸缩臂夹抱机在静止状态下空载时,整备质量10 000 kg,前桥承载3 700 kg,后桥承载6 300 kg;额定负载下整备质量14 000 kg,前桥承载12 240 kg,后桥承载1 760 kg。所以轮胎的静止最大承受负载为6120 kg.
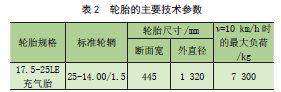
2) 轮胎选型
按GB1190—1991《工程机械轮胎》的规定和计算得到的轮载分配和高性价比的原则,选用国内工程车常用轮胎,考虑车的越野性,离地间隙不能小于450mm,考虑整车的工况要求,选用规格为17.5-25(16 层级、L-2E 花纹) 的轮胎。轮胎的主要技术参数见表2。
2.4 驱动桥的选择
当夹抱机空载时整备质量10 000 kg,此时前轴承载3 700 kg,后轴承载6 300 kg;当夹抱机加装额定负载时整备质量14 000 kg,此时前轴承载12 240 kg,后轴承载1 760 kg。所以本车选用驱动转向桥,承载能力16 t 以上,前后桥均采用油浸式多刹车片结构,前桥带拉线式驻车制动,带有中间减速器与轮边行星减速,主减速器传动比为11:35,轮边减速传动比为1 ∶ 6,总传动比为1 ∶ 19.09。
2.5 变速箱选型及速度计算
液力变矩器及变速箱选型考虑结构简单、工作可靠、质量轻、尺寸紧凑以及效率高和适合本机变矩性能要求,变速箱动力与机械换挡相结合,4 个前进挡,4 个后退挡,各挡位前进速比为i 1=4.8、i 2=2.9、i 3=1.4、i 4=0.8,后退速比为 i 1=4.8、i 2=2.9、i 3=1.4、i 4=0.8,有
式中:T v 为车辆理论行驶速度,km/h;e n 为发动机转速;K r 为驱动轮动力半径;a i 为变速箱各挡位速比;b i 为前、后桥速比。
计算得到各前进挡速度:v 1 =4.5 km/h, v 2=7.3 km/h,v 3=15.3 km/h, v 4= 27.6 km/h;后退各挡的速比与前进挡相同,即后退各挡的速度与前进各挡的速度相对应。
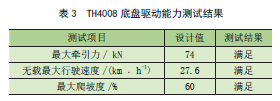
3 底盘驱动性能试验
TH4008 型越野伸缩臂夹抱机样机研制完成后,对底盘驱动性能进行了试验测试,试验结果如表3 所示。样机试验、样机作业如图4、图5 所示。

图4 样机试验

图5 样机作业
4 结语
论述了TH4008 伸缩臂夹抱机总体设计及性能参数计算过程,介绍了其整体结构布置、主要技术参数以及动力传动路线;对主要零部件发动机、车桥、变矩器及变速箱、轮胎等进行了选型。试验验证证明,选型满足系统设计要求。对未来相关车型的底盘设计和优化提供了重要的参考。



 广告
广告 



最新资讯
-
奇石乐持续投资增长型市场,2025年业绩保持
2026-03-13 15:54
-
国际标准《商用车辆 牵引车与挂车之间的电
2026-03-13 13:51
-
比亚迪弗迪电池CEO何龙:二代刀片电池在不
2026-03-13 13:50
-
思看科技AM-CELL C 自动化光学3D检测系统上
2026-03-13 10:40
-
《汽车隔声性能测量与评价方法 第2部分:消
2026-03-12 13:53
