




 广告
广告





















































电动助力转向系统(EPS)的构成与工作原理
2021-09-15 00:31:12· 来源:旺材汽车电子

来源:《图解汽车电子技术》(系统篇) 日本电装汽车电子技术研究会 著通常,EPS由检测驾驶者的转向操作扭矩的扭矩传感器、根据扭矩信号计算助力扭矩并控制电机驱
来源:《图解汽车电子技术》(系统篇) 日本电装汽车电子技术研究会 著
通常,EPS由检测驾驶者的转向操作扭矩的扭矩传感器、根据扭矩信号计算助力扭矩并控制电机驱动的EPS ECU、产生助力的电机、使电机驱动力传递至转向机构的减速器等构成。
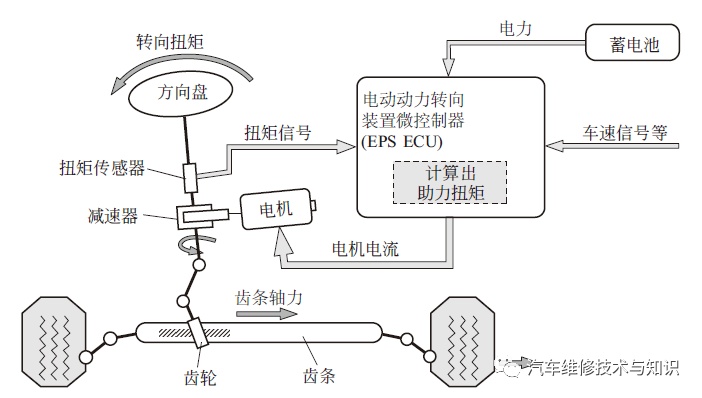
EPS的构成 ▲
1
EPS的种类
如下图所示,依据电机的种类和助力位置,EPS可分为转向柱助力、齿轮助力、齿条助力3个种类。

转向柱助力式EPS成本低,被广泛采用。齿轮助力式EPS是在齿轮附近布置电机。齿条助力式EPS的最终输出端为接近轮胎的齿条,所以助力损失小;并且,执行器距离驾驶者远,具有声音较小、振动较小的优点,大多用于高档车。齿条助力式EPS的执行器、控制器均布置于发动机舱内,要求具备耐热、防水等性能,因此系统的成本升高。
2
EPS电机
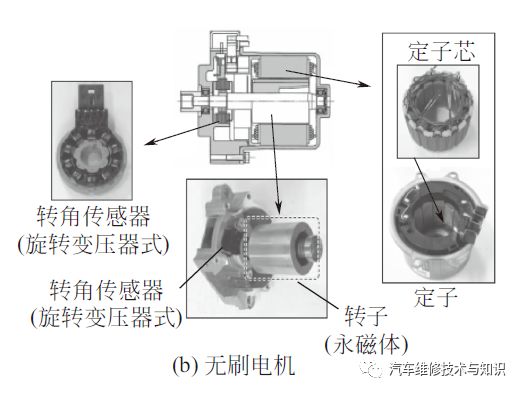
可在EPS中使用的电机分为有刷电机和无刷电机。
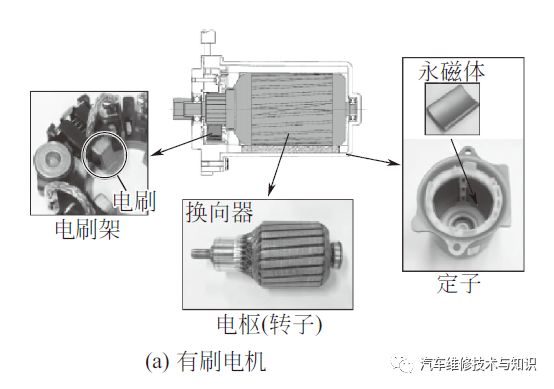
有刷电机在电刷和整流子转动的同时切换电流,所以接通电源就能转动,成本较低。但是,有刷电机的绕组布置于转子侧,随着输出功率的增加,电机的惯性力矩增加,就需要解决转向操作灵敏度变差的问题。
无刷电机本身不带有整流作用,所以需要内置转角传感器,通过电路切换对应转角信号的电流,结构复杂且成本高。但是,无刷电机的绕组布置于定子侧,转子侧为磁体,即使输出功率增加,也能抑制惯性力矩增加的问题。
3
扭矩传感器
扭矩传感器是检测驾驶者转向操作扭矩的传感器,是检测EPS所需基本信息的重要装置,其构造如下图所示,由设置于转向轴上的扭力杆和检测扭力杆扭转角度的传感器构成。
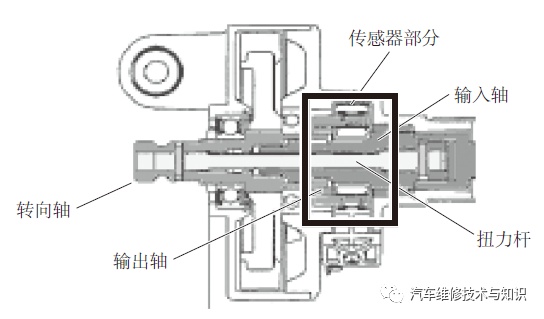
扭矩传感器的构造 ▲
EPS的扭矩传感器是非常重要的部件,所以常用的类型是能够确保可靠性的非接触式。接下来,对非接触式扭矩传感器中3种主要方式进行说明。
(1)磁感应式
磁感应式是指安装于扭力杆上下位置的检测线圈和补偿线圈的凹凸相对位置随着扭力杆的扭转而变化,并通过外侧设置的检测线圈获取相应磁路变化的方式,且这种方式的扭矩传感器已被广泛应用。
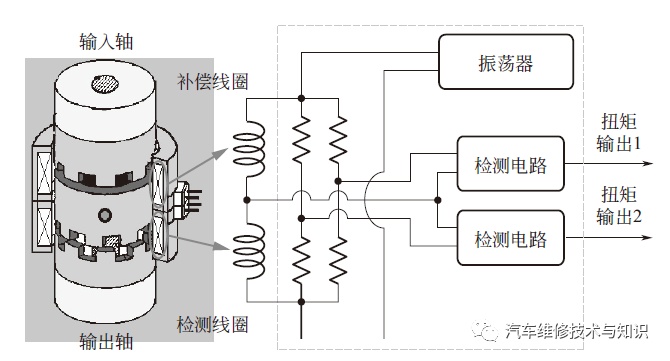
磁感应式扭矩传感器(出处:JETKT) ▲
(2)霍尔集成电路式
霍尔集成电路式是在扭力杆上布置多极磁体,通过周围设置的磁束环使扭力杆扭转产生的磁力不平衡得以聚合,并使用霍尔集成电路的方式。
霍尔集成电路具有温度特性,有的可在集成电路内完成修正,且满足实用条件。
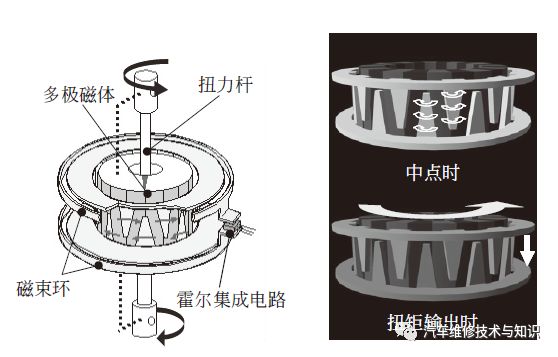
霍尔集成电路式扭矩传感器 ▲
(3)双旋转变压器式
双旋转变压器式是在扭力杆的上下位置装有转角传感器(旋转变压器),直接检测各转角值,依据其差量计算扭转量,并换算成扭矩的方式。
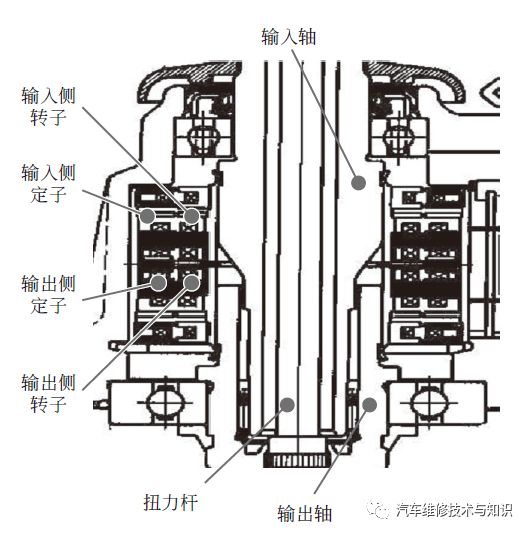
双旋转变压器式扭矩传感器(出处:JETKT) ▲
直接使用转角传感器,不仅能检测扭矩,还能检测转向操作角度。另外,如果扭矩传感器要使用旋转变压器,则需在ECU侧设置电路。
4
EPS ECU
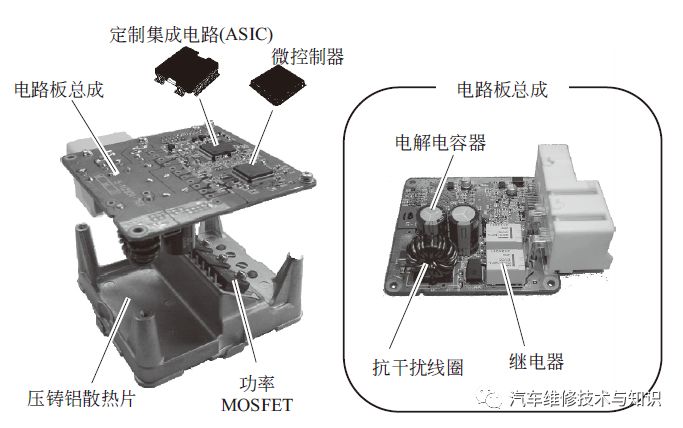
EPS ECU由用于控制的微控制器、用于监测的集成电路(有时为微控制器)、电机的驱动电路(驱动电路和转换电路)、通断电机路径及电源路径的继电器、接收外部信号的接口电路等构成。电机驱动电路的作用是对功率元件MOSFET实施通断的PWM控制。
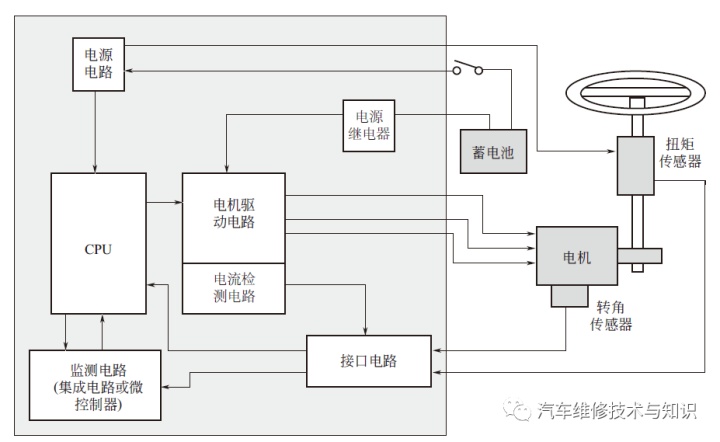
EPS ECU的电路示例(无刷) ▲
EPSECU的印制电路板如下图所示,由排除电源线路中干扰所需的线圈、吸收电流变动所需的电解电容器、通断电源所需的电源继电器等构成。由于要求印制电路板的体积不能太大,有些类型的印制电路板搭载半导体继电器。
EPS ECU的构成示例(有刷) ▲
5
控制
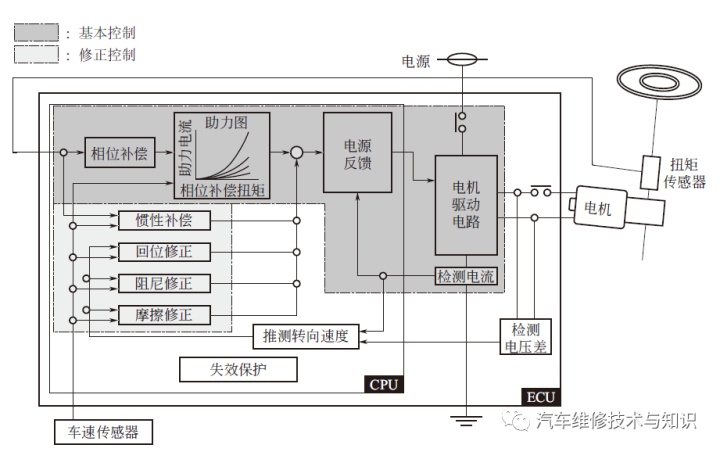
EPS的助力控制如下图所示,可分为助力基本控制、助力辅助控制、电机电流控制、失效保护处理。各厂商的控制方法有所不同,此处对常见的控制方法进行说明。
EPS控制的示例 ▲
(1)助力基本控制
为了补偿系统对扭矩传感器信号的响应延迟量,应实施相位补偿。根据相位补偿后的值,确定助力量。这些控制与车辆特性紧密相关,大多以图谱形式设定。此外,也可以通过车速调节助力量,施加车速感应特性。之后,加上辅助控制量,将最终助力指令值交给电流控制部分。
(2)助力辅助控制
方向盘不仅受驾驶者的转向操作支配,当路面对轮胎施加扭矩时,也会出现方向盘转动的状况。所以,除了常规的助力基本控制,还应实施助力辅助控制。主要的助力辅助控制为:排除电机的惯性力矩影响时,为了平稳助力进行“惯性补偿”;转向后由于回正转矩使方向盘回位时,进行对应的回位修正;松手后回位时等,为了充分使方向盘稳定进行“阻尼修正”;由于电机或机构部分的摩擦引起的助力延迟,进行对应的摩擦修正。
修正量与助力图相同,是依据车辆特性改变的值,都应在匹配后确定。
(3)电机电流控制
为了使电机实时跟踪上述电机电流指令值,就需要控制电机的电流。通常是在检测出电机电流之后,修正指令值对应的差量,即反馈控制。并且,按求取助力指令值的一半周期,设定电机电路控制周期。基本上,针对指令值和电流检测值的差量,可实施PI(比例积分)控制,转换为电压指令值,并将此电压指令转换为PWM的占空比,通过此占空比通断MOSFET,控制电机。
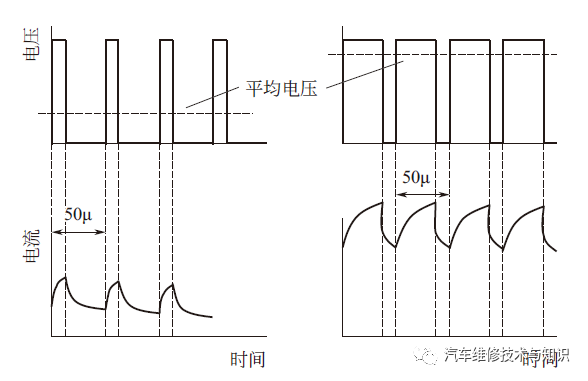
PWM控制(有刷) ▲
此外,使用无刷电机时,电机电流控制通常为获取电机转角信号的矢量控制,此时矢量的d轴、q轴同样要进行反馈PI控制。
除了反馈控制,有的电机电流控制也采用观察器控制、模型匹配控制。
(4)失效保护
EPS为了提供约10倍于驾驶者转向操作力的助力,需要在助力出现异常时迅速进行检测,并采取准确的应对措施(下表)。
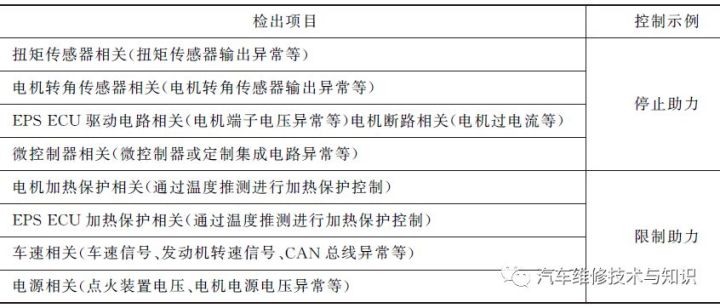
EPS最应该避免的异常状态除了异常过热,还有方向盘无法转动的方向盘锁死、方向盘随意自由转动的自由转。当确实检测出可能产生异常时,必须关闭系统。
因此,大多EPS采用监测驾驶者转向操作扭矩的方向和助力方向是否一致的联锁方式。但是,与其他系统协同工作的EPS已经实用化,助力方向不一定能与转向操作扭矩方向保持一致,所以在这种系统中,采用监测控制计算本身的方式。
- 下一篇:越野伸缩臂夹抱机底盘驱动系统设计
- 上一篇:汽车数据安全、网络安全等自查要点解析



 广告
广告 



最新资讯
-
市场监管总局:去年召回684万辆汽车,通过
2026-03-20 13:46
-
联合国法规R80对大型客车座椅及固定点强度
2026-03-20 12:18
-
千亩级基地开跑!比亚迪“5分钟充电”电池
2026-03-19 17:18
-
安全调试不踩坑!Workbench安全功能配置,
2026-03-19 17:10
-
联合国法规R89对车辆速度限制装置的工程化
2026-03-19 12:21
