




 广告
广告





















































特斯拉的自动驾驶方案,真的适合中国吗?
2021-03-24 11:04:17· 来源:自动驾驶干货铺 作者:陈光ShawnChen

特斯拉所坚持的技术路线是以视觉为主的自动驾驶方案,我认为他们所坚持的自动驾驶并不适合中国。以下是我给出的理由。特斯拉自动驾驶方案的不足特斯拉掌门人埃隆
特斯拉所坚持的技术路线是以视觉为主的自动驾驶方案,我认为他们所坚持的自动驾驶并不适合中国。以下是我给出的理由。
特斯拉自动驾驶方案的不足
特斯拉掌门人埃隆•马斯克是一个习惯于使用“第一性原理”思维看待技术问题的人。
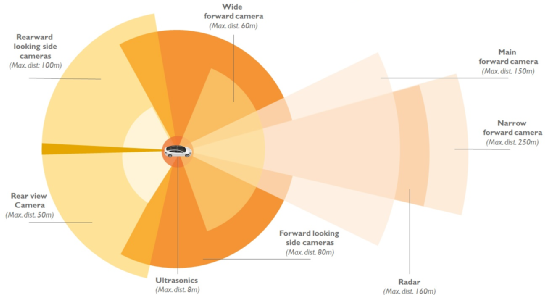
在马斯克眼里,既然人类能够只用双眼识别车道线、红绿灯、标识牌来完成感知交通环境,那么特斯拉一定也可以靠车上的8个摄像头(加一个毫米波雷达做冗余)完成自动驾驶的环境感知任务,甚至还抛出“用激光雷达的都是傻瓜”的惊人言论,直接让全球的自动驾驶从业人员满脸黑线。
马斯克的纯视觉自动驾驶感知方案
马斯克所坚持的纯视觉自动驾驶方案乍一看好像比较合理,但经不起推敲。他的这套思考逻辑完全没有考虑到现阶段软件算法的能力。人类除了拥有“极高像素”的眼睛外,还有一个媲美强人工智能的处理器——大脑,而自动驾驶汽车的感知算法能力还处于弱人工智能阶段,完全无法达到他所期望的程度。
处于弱人工智能阶段的视觉感知算法存在如下三点不足。
不足之一:依赖大量且丰富的标注数据
主流的视觉感知算法需要大量的标注数据(量级在几万帧到十几万帧)进行模型训练,只有给模型输入足够多的汽车、行人、骑行人等样本,它才能在复杂的道路场景中检测和区分出目标。一旦某个东西在标记样本集中很少或没有(比如满载货物的快递三轮车),就很难做出正确的检测。
去年6月发生在台湾,一辆开着Autopilot巡航功能的Model S径直撞向一辆倒在路中间的大货车,就是因为特斯拉感知算法样本集中缺少这种白车厢的数据,这个目标无法归类到车、自行车、行人、动物中的任何一类,于是算法倾向于判定这个目标并不是障碍物,不进行减速制动,于是发生了事故。

2020年6月1日台湾嘉义的特斯拉撞车事故
这里需要澄清一下的是,并不是没有传感器发现这个大车厢。安装在特斯拉前保险杠里的毫米波雷达是能够稳定识别这个静止的大车厢的,但毫米波雷达的静止目标误检较多,且高度信息缺失,算法很难区分毫米波雷达检出的静止目标到底是真实存在还是误检的目标(比如路上方的指路牌)。为了保证驾驶体验,在感知算法中会把雷达提供的静止目标都干掉,不仅特斯拉是这么做的,业内很多厂商也是这么做的。
不足之二:演绎能力不足
相比于人脑,现阶段的视觉感知算法的演绎能力不足。人脑只需要为数不多的图片或视频就能对事物的根本进行认知。比如当我们对货车这个目标进行认知后,各种五颜六色的改装货车、或者倒在地上的货车,即使我们以前没见过,但见到时依旧能够很快做出判断。这就是人脑的演绎能力。
目前广泛应用在自动驾驶领域的视觉感知算法,在演绎能力上稍显不足。一旦路上出现了某个不在数据集中的障碍物,会有很大概率漏检。
不足之三:感知精细程度不足
驾驶过程时,人脑对周围环境信息的处理更加精细化。
人眼能从两辆车之间的缝隙中看到被遮挡的区域是否有车在行驶,除此了观测车身和车轮等细微变化外,还能通过挡风玻璃观测到其他驾驶员的神情、动作等,这些信息对驾驶的判断很重要。然而现阶段的视觉感知算法完全做不到这么精细,还有比较长的路要走。
以上就是视觉感知算法已知的三点不足。
马斯克所坚持的摄像头+毫米波雷达+超声波雷达的低成本传感器方案,足够满足高速/环路和停车场场景下的自动驾驶需求,这是因为这些场景下的交通环境、交通参与者(车、人等)比较单一。但当场景变复杂(比如前面提到的倒在路中间的大车厢)或面对交通环境更为复杂的城市工况时,这三类传感器配置所提供的感知能力就显得有些力不从心了。
夜间光线不好的道路施工区域、停在路边的车突然开门、堆高货物的膨胀三轮车、从狭窄路口突然窜出的电瓶车等,都是实现城区自动驾驶时需要解决的典型问题。这些问题依靠马斯克的技术路线是很难搞定的,于是激光雷达的技术路线应运而生。

激光雷达的高精度点云信息能极大提升感知能力
特斯拉抛弃激光雷达、玩命狂奔的路上,有着无数特斯拉粉丝的加油鼓劲和亲自下场测试,甚至不惜为此将自己的安全置于危险中。国内的车企就没特斯拉这么幸运了,出了任何事故都需要好好应对,如履薄冰,稍不注意就可能演变成一场对品牌造成沉重打击的舆论风波。因此即使激光雷达的成本不低,也不知道什么时候成本会降下来,为了驾乘人员的安全,国内技术领先的车企早早地就开始规划,以激光雷达为主传感器的感知路线。
中国汽车品牌的破局之路
得益于国内强大的研发能力和供应链体系,激光雷达的成本不仅从原本的几十万降低至万元级别,更在机械式激光雷达的基础上研制出了更适合汽车使用的车规级固态激光雷达。国内在自动驾驶领域领先的车企纷纷表示将在年内量产搭载激光雷达的车型,以实现L3级甚至更高级别的自动驾驶功能。
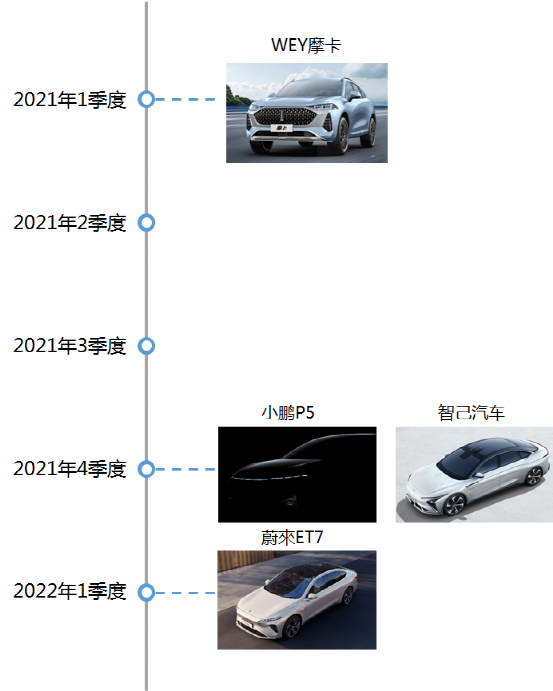
从目前已经公开的资料中,有四家国内车企会在2021年前后正式发售搭载激光雷达的量产车型。长城旗下的WEY摩卡作为国内首个量产固态激光雷达的车型,将在2021年第一季度正式上市,国内诸如蔚来、小鹏的新势力造车紧随其后,将在2021年第四季度和2022年第一季度发售三款搭载激光雷达的车型,如下所示。
这些车型作为国内最早搭载激光雷达的量产车型,并没有因为拥有激光雷达而减少其他传感器的配置,他们走的都是多传感器冗余的道路。比如摩卡WEY除了3个固态激光雷达外,它还配备了8个毫米波雷达、8个摄像头和12个超声波雷达,再加上高精度地图和5G+V2X的加持,做到了360°无死角覆盖的感知范围。
高速自动导航辅助是自动驾驶领域一项重要的功能,可以根据导航信息自主完成上下匝道、高速巡航、换道超车的辅助驾驶系统。像特斯拉搭载的NOA、蔚来搭载的NOP,小鹏搭载的NGP以及WEY摩卡搭载的NOH都是同一功能的不同称呼。
无论是特斯拉的NOA、蔚来的NOP还是小鹏的NGP,都是依靠摄像头+毫米波雷达这两款传感器实现的导航辅助驾驶。WEY摩卡的NOH有所不同,这是第一次将激光雷达的点云信息引入到高速自动领航辅助驾驶中,激光雷达能够强化远距离静态目标的感知,并能有效弥补摄像头在夜晚、光线变化等特殊场景下感知跳变、受限的问题。
在我们的日常出行场景中,常会遇到这样的场景,100米外散落在地上的轮胎、低矮路障等,这些目标体积小,视觉检出时的距离过近,一旦车速没能及时降低,有可能引发事故。但这些目标依靠激光雷达的点云,可以将检出距离提升至100米以上,即使在雨雾天气也能提前识别危险。
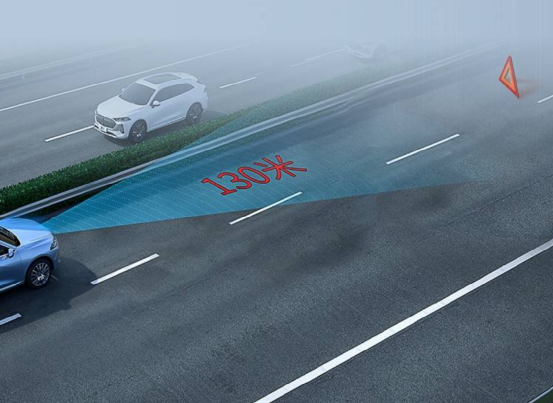
搭载激光雷达的系统提前识别低矮障碍物风险
提前识别风险只是激光雷达的一项能力,激光雷达精确的点云信息还能够提升车辆、行人的检测精度,以此来实现更精确的横纵向控制,不仅保证安全,还能提升舒适性。
结语
这就是中国汽车品牌都认可的破局之路。抛弃埃隆·马斯克那套基于纯视觉+毫米波雷达实现L4级自动驾驶的幻想,依靠激光雷达和多传感器(高精度地图、V2X都可以算作另类的传感器)冗余的技术路线,才是现阶段最稳妥的技术路线,也是最适合中国路况的技术路线。
特斯拉自动驾驶方案的不足
特斯拉掌门人埃隆•马斯克是一个习惯于使用“第一性原理”思维看待技术问题的人。
在马斯克眼里,既然人类能够只用双眼识别车道线、红绿灯、标识牌来完成感知交通环境,那么特斯拉一定也可以靠车上的8个摄像头(加一个毫米波雷达做冗余)完成自动驾驶的环境感知任务,甚至还抛出“用激光雷达的都是傻瓜”的惊人言论,直接让全球的自动驾驶从业人员满脸黑线。
马斯克的纯视觉自动驾驶感知方案
马斯克所坚持的纯视觉自动驾驶方案乍一看好像比较合理,但经不起推敲。他的这套思考逻辑完全没有考虑到现阶段软件算法的能力。人类除了拥有“极高像素”的眼睛外,还有一个媲美强人工智能的处理器——大脑,而自动驾驶汽车的感知算法能力还处于弱人工智能阶段,完全无法达到他所期望的程度。
处于弱人工智能阶段的视觉感知算法存在如下三点不足。
不足之一:依赖大量且丰富的标注数据
主流的视觉感知算法需要大量的标注数据(量级在几万帧到十几万帧)进行模型训练,只有给模型输入足够多的汽车、行人、骑行人等样本,它才能在复杂的道路场景中检测和区分出目标。一旦某个东西在标记样本集中很少或没有(比如满载货物的快递三轮车),就很难做出正确的检测。
去年6月发生在台湾,一辆开着Autopilot巡航功能的Model S径直撞向一辆倒在路中间的大货车,就是因为特斯拉感知算法样本集中缺少这种白车厢的数据,这个目标无法归类到车、自行车、行人、动物中的任何一类,于是算法倾向于判定这个目标并不是障碍物,不进行减速制动,于是发生了事故。
2020年6月1日台湾嘉义的特斯拉撞车事故
这里需要澄清一下的是,并不是没有传感器发现这个大车厢。安装在特斯拉前保险杠里的毫米波雷达是能够稳定识别这个静止的大车厢的,但毫米波雷达的静止目标误检较多,且高度信息缺失,算法很难区分毫米波雷达检出的静止目标到底是真实存在还是误检的目标(比如路上方的指路牌)。为了保证驾驶体验,在感知算法中会把雷达提供的静止目标都干掉,不仅特斯拉是这么做的,业内很多厂商也是这么做的。
不足之二:演绎能力不足
相比于人脑,现阶段的视觉感知算法的演绎能力不足。人脑只需要为数不多的图片或视频就能对事物的根本进行认知。比如当我们对货车这个目标进行认知后,各种五颜六色的改装货车、或者倒在地上的货车,即使我们以前没见过,但见到时依旧能够很快做出判断。这就是人脑的演绎能力。
目前广泛应用在自动驾驶领域的视觉感知算法,在演绎能力上稍显不足。一旦路上出现了某个不在数据集中的障碍物,会有很大概率漏检。
不足之三:感知精细程度不足
驾驶过程时,人脑对周围环境信息的处理更加精细化。
人眼能从两辆车之间的缝隙中看到被遮挡的区域是否有车在行驶,除此了观测车身和车轮等细微变化外,还能通过挡风玻璃观测到其他驾驶员的神情、动作等,这些信息对驾驶的判断很重要。然而现阶段的视觉感知算法完全做不到这么精细,还有比较长的路要走。
以上就是视觉感知算法已知的三点不足。
马斯克所坚持的摄像头+毫米波雷达+超声波雷达的低成本传感器方案,足够满足高速/环路和停车场场景下的自动驾驶需求,这是因为这些场景下的交通环境、交通参与者(车、人等)比较单一。但当场景变复杂(比如前面提到的倒在路中间的大车厢)或面对交通环境更为复杂的城市工况时,这三类传感器配置所提供的感知能力就显得有些力不从心了。
夜间光线不好的道路施工区域、停在路边的车突然开门、堆高货物的膨胀三轮车、从狭窄路口突然窜出的电瓶车等,都是实现城区自动驾驶时需要解决的典型问题。这些问题依靠马斯克的技术路线是很难搞定的,于是激光雷达的技术路线应运而生。
激光雷达的高精度点云信息能极大提升感知能力
特斯拉抛弃激光雷达、玩命狂奔的路上,有着无数特斯拉粉丝的加油鼓劲和亲自下场测试,甚至不惜为此将自己的安全置于危险中。国内的车企就没特斯拉这么幸运了,出了任何事故都需要好好应对,如履薄冰,稍不注意就可能演变成一场对品牌造成沉重打击的舆论风波。因此即使激光雷达的成本不低,也不知道什么时候成本会降下来,为了驾乘人员的安全,国内技术领先的车企早早地就开始规划,以激光雷达为主传感器的感知路线。
中国汽车品牌的破局之路
得益于国内强大的研发能力和供应链体系,激光雷达的成本不仅从原本的几十万降低至万元级别,更在机械式激光雷达的基础上研制出了更适合汽车使用的车规级固态激光雷达。国内在自动驾驶领域领先的车企纷纷表示将在年内量产搭载激光雷达的车型,以实现L3级甚至更高级别的自动驾驶功能。
从目前已经公开的资料中,有四家国内车企会在2021年前后正式发售搭载激光雷达的量产车型。长城旗下的WEY摩卡作为国内首个量产固态激光雷达的车型,将在2021年第一季度正式上市,国内诸如蔚来、小鹏的新势力造车紧随其后,将在2021年第四季度和2022年第一季度发售三款搭载激光雷达的车型,如下所示。
这些车型作为国内最早搭载激光雷达的量产车型,并没有因为拥有激光雷达而减少其他传感器的配置,他们走的都是多传感器冗余的道路。比如摩卡WEY除了3个固态激光雷达外,它还配备了8个毫米波雷达、8个摄像头和12个超声波雷达,再加上高精度地图和5G+V2X的加持,做到了360°无死角覆盖的感知范围。
高速自动导航辅助是自动驾驶领域一项重要的功能,可以根据导航信息自主完成上下匝道、高速巡航、换道超车的辅助驾驶系统。像特斯拉搭载的NOA、蔚来搭载的NOP,小鹏搭载的NGP以及WEY摩卡搭载的NOH都是同一功能的不同称呼。
无论是特斯拉的NOA、蔚来的NOP还是小鹏的NGP,都是依靠摄像头+毫米波雷达这两款传感器实现的导航辅助驾驶。WEY摩卡的NOH有所不同,这是第一次将激光雷达的点云信息引入到高速自动领航辅助驾驶中,激光雷达能够强化远距离静态目标的感知,并能有效弥补摄像头在夜晚、光线变化等特殊场景下感知跳变、受限的问题。
在我们的日常出行场景中,常会遇到这样的场景,100米外散落在地上的轮胎、低矮路障等,这些目标体积小,视觉检出时的距离过近,一旦车速没能及时降低,有可能引发事故。但这些目标依靠激光雷达的点云,可以将检出距离提升至100米以上,即使在雨雾天气也能提前识别危险。
搭载激光雷达的系统提前识别低矮障碍物风险
提前识别风险只是激光雷达的一项能力,激光雷达精确的点云信息还能够提升车辆、行人的检测精度,以此来实现更精确的横纵向控制,不仅保证安全,还能提升舒适性。
结语
这就是中国汽车品牌都认可的破局之路。抛弃埃隆·马斯克那套基于纯视觉+毫米波雷达实现L4级自动驾驶的幻想,依靠激光雷达和多传感器(高精度地图、V2X都可以算作另类的传感器)冗余的技术路线,才是现阶段最稳妥的技术路线,也是最适合中国路况的技术路线。



 广告
广告 



最新资讯
-
直播|经纬恒润:车载光通信的开发与测试
2026-01-22 18:49
-
车载光通信走向实车验证
2026-01-22 18:48
-
解析GB/T 47001-2025智能网联汽车数字身份
2026-01-22 14:48
-
解析 GB 39901-2025:轻型汽车自动紧急制动
2026-01-22 14:47
-
基于GB 24407-2025的专用校车安全技术深度
2026-01-22 14:47
