




 广告
广告





















































自动驾驶汽车测试关键行人场景生成
2025-04-23 17:16:28· 来源:同济智能汽车研究所

为了验证本研究中提出的风险模型的有效性,TTC 的倒数表示为 作为 RDSI 的参考值进行分析,表明 与风险水平成正比。[图 13]和[图 14](a)显示了所提出的风险模型与 ,[图 14](b)显示了每个交互场景中行人和车辆的 TTC。在每一帧中,它们之间较大的 TTC 值的倒数被视为 价值。如图[13]所示,风险模型曲线与 曲线。这意味着所提出的风险模型可以有效地反映潜在的交互风险。如图[14]所示,TTC 指标对横向移动物体带来的风险不敏感,导致与提出的风险模型相比,行人过马路场景中的响应延迟。这表明与 TTC 相比,所提出的风险模型在评估横向风险方面具有卓越的能力。
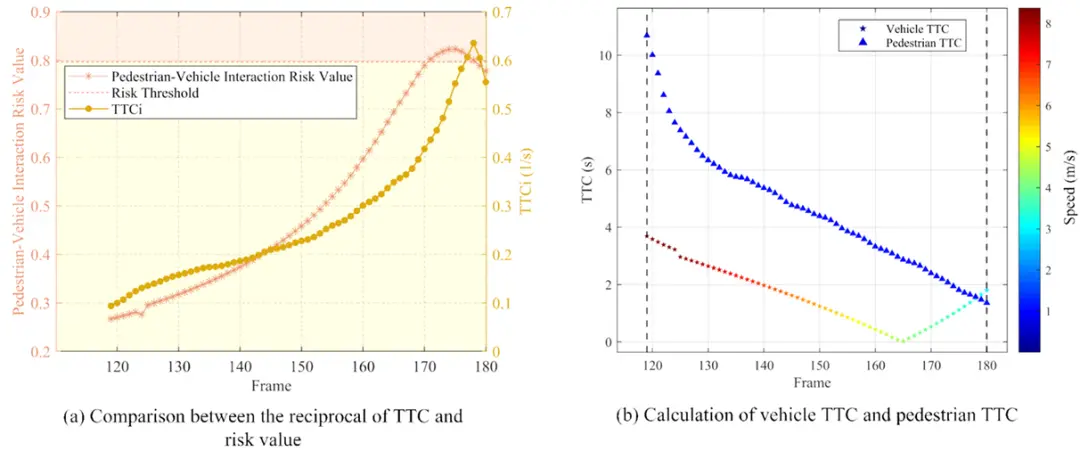
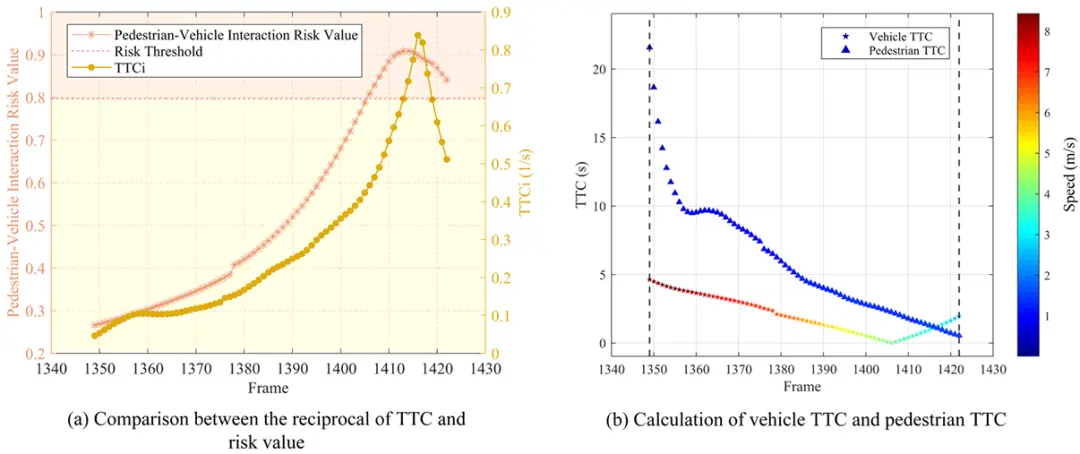
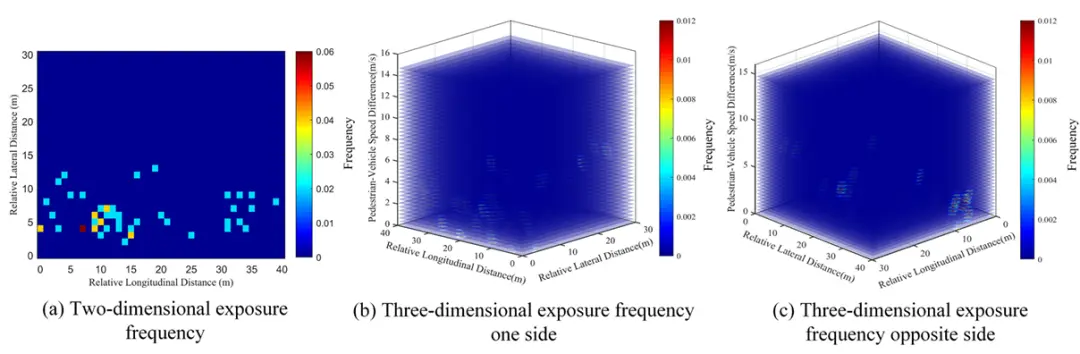
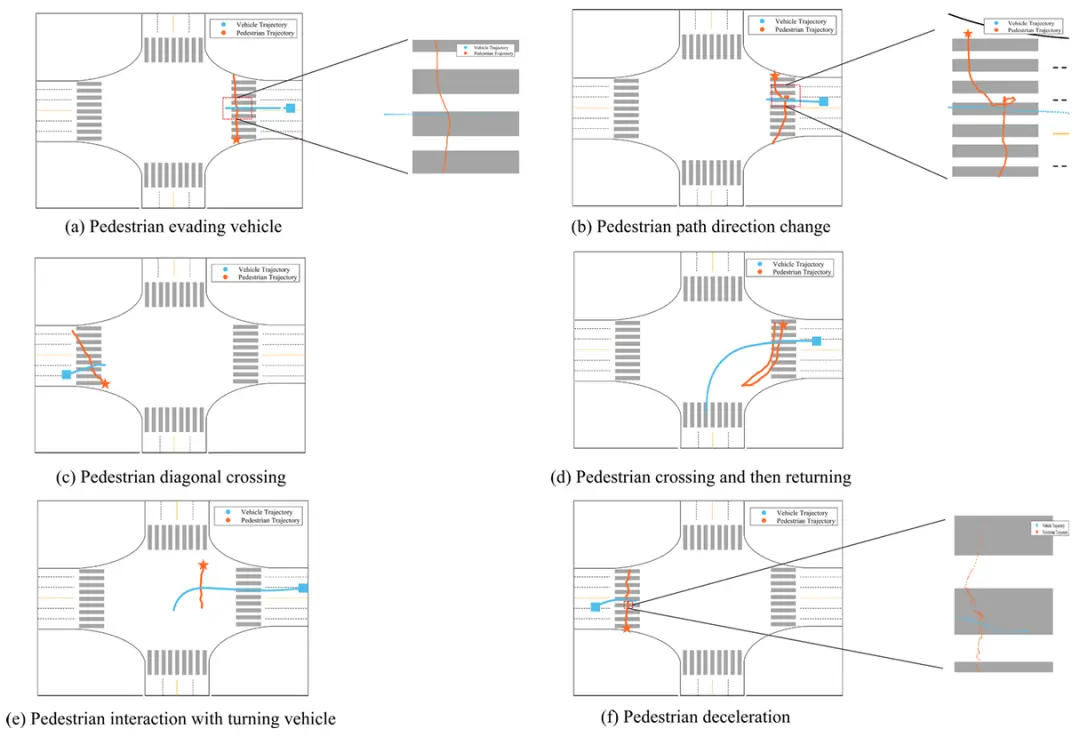
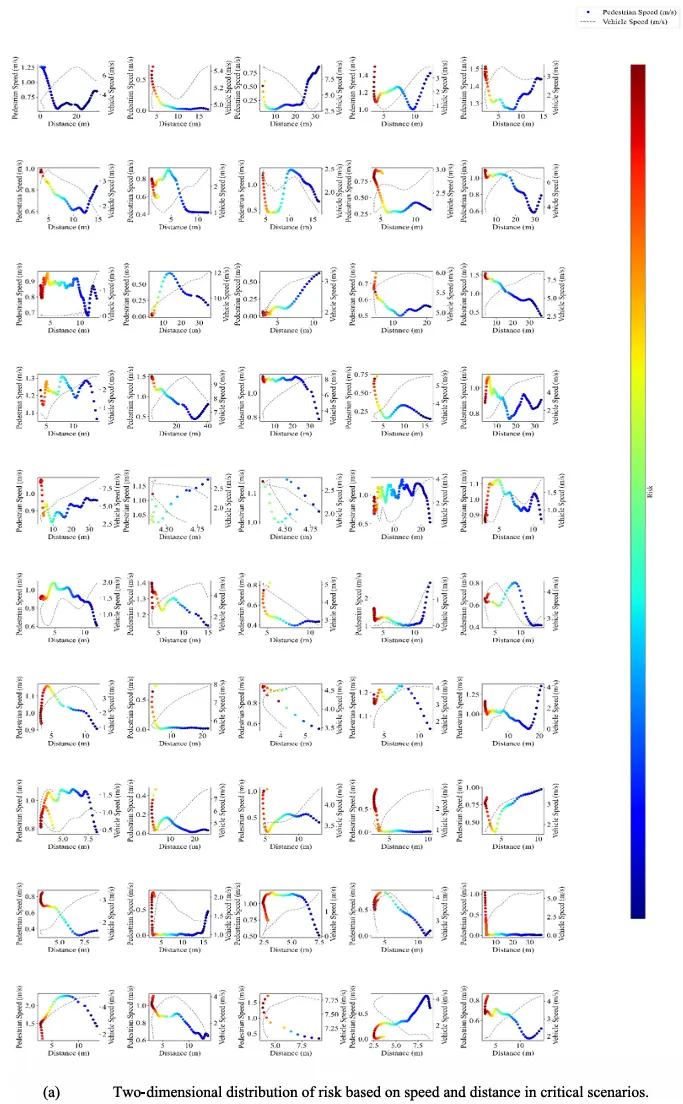
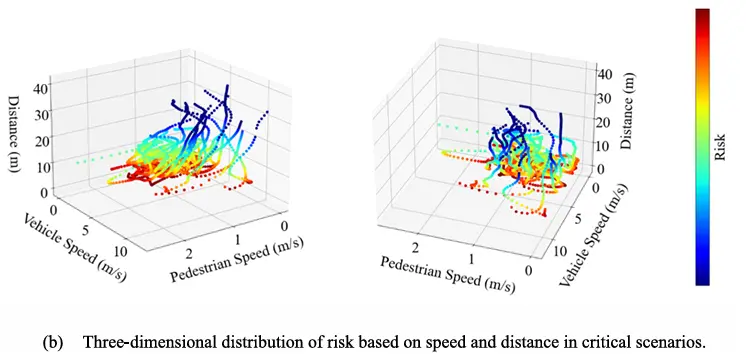
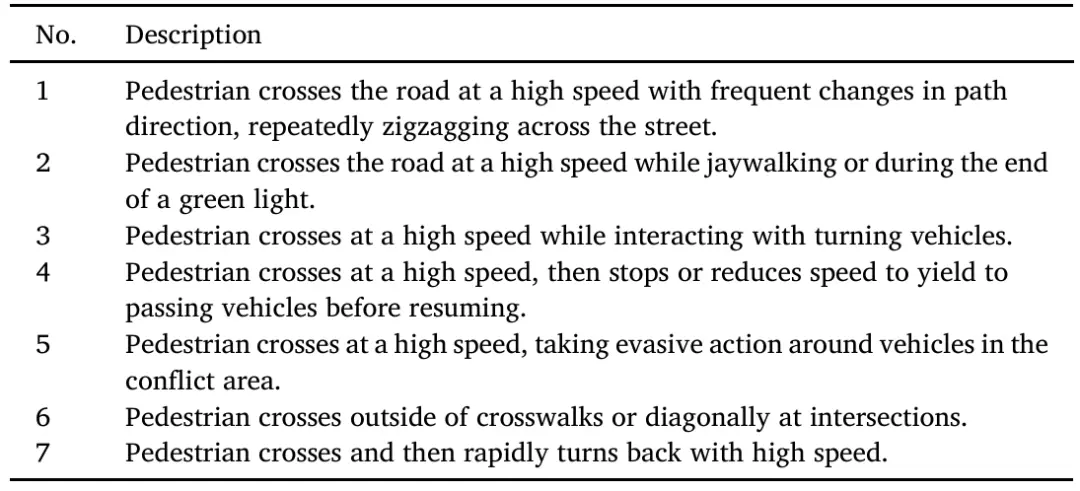
图 13.车辆与行人互动风险的比较分析和 趋势(最小 TTC =1.57 秒的情景)
图 14.车辆与行人互动风险的比较分析和 趋势(最小 TTC =1.19 秒的情景)
6.5. 行人关键测试场景
在原始情景库中优化搜索后,一共生成了 50 个关键场景,其分布如图[15]所示。[图 16]说明了从最终确定的关键场景中提取的不同行人运动特征的选择。[图 17]单独分析了每个已确定的关键情景,[表 4]显示了人行横道特征的详细分类。
图 15.关键场景下的暴露频率分布
图 16.危急情况下的部分行人行为
图 17. 在关键情况下,与不同速度和距离相关的风险
表 4 描述关键场景中的行人行为
如[表 4]所示,该实验根据所提出的方法生成的 50 个关键测试场景将行人行为分为 7 种类型,这对 AV 行人测试至关重要。这些场景在信号灯交叉路口是典型且高风险的,对 AV 的感知、预测和决策构成挑战。高速之字形、乱穿马路以及与转弯车辆的互动等行为可能会测试 AV 预测不可预测的运动的能力。带有规避动作或突然停止的高速穿越对 AV 的实时响应能力和自适应决策提出了挑战。非标准交叉口,例如对角线移动或快速改变方向,会影响自动驾驶汽车的环境感知及其适应动态条件的能力。



 广告
广告 



最新资讯
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
