




 广告
广告





















































自动驾驶汽车测试关键行人场景生成

当当前 小于 ,FCW 被激活,三级 AEB 选择不同的减速率来避免碰撞。图 5 是三阶段 AEB 的示意图。
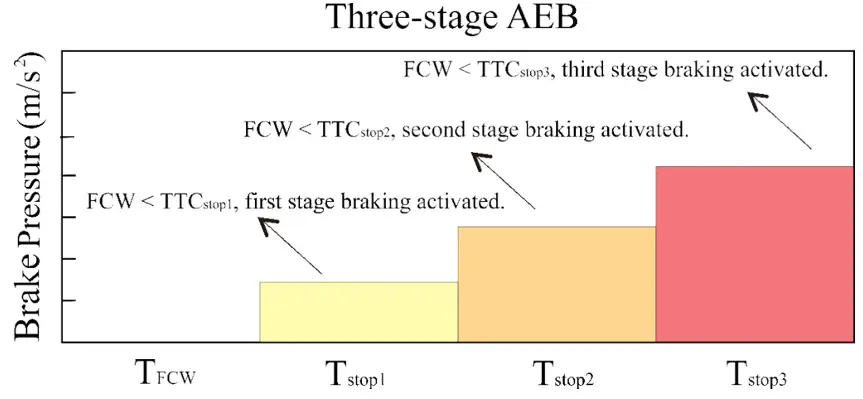
图 5.三级 AEB 模型的制动策略
•风险场模型
基于 APF 方法的风险评估指标在风险等级分类方面具有显著优势,非常适合复杂流量场景。Wang et al. (Wang et al., 2015)引入了驾驶安全场 (DSF) 模型,该模型定量描述了各种交通因素对驾驶安全的影响。Wu et al. (Wu et al., 2019) 进一步将轨迹预测模块集成到 DSF 模型中,并提出了一种针对无信号交叉口的车辆-行人风险评估方法。它可以减少制动时间并提高 TTC,但在某些情况下的适用性存在局限性。本研究引入了一种基于 APF 的车辆-行人互动风险场模型。它充分考虑了行人过马路行为产生的动态交互风险,并准确计算了车行交互场景中风险场的实时演变。
DSF 由静止物体产生的势场、移动物体形成的动场和受驾驶员影响的行为场组成。安全潜力 定义为车辆在驾驶安全场中在保守力下所拥有的标量势能,在距场源无限远处的值为零。安全势能 车辆 由移动物体诱导 表示如下:

图 6 说明了场强 典型人行横道场景中的分布。在保守矢量场中,势能 是相应场强的梯度 ,场强的大小和方向决定了势能的分布。车辆的势能受过马路行人产生的场强的影响,并根据相对距离等参数而变化。场强表达式如下:

图 6. 人行横道场景中的场强分布
其中向量 表示物体 的速度而 表示移动对象之间的距离矢量 和主车 。角度 表示 和 .常数 (>0)和 (>1)未指定,并且 表示风险系数。 和 是受路况影响的因素。
虚拟质量 和 评估与物体属性 (质量、类型、速度)相关的潜在驾驶风险,这主要是指事故可能导致的潜在损失。对于相同类型的对象,物理质量和速度越大,虚拟质量就越大,因此潜在损耗也就越高。此外,对于等效的物理质量和速度,碰撞的潜在损失取决于所涉及的物体类型。例如, 定义为虚拟质量:

变量 由 交通参与者们的位置决定,并反映了该领域的风险分布。更高的 价值意味着更大的风险。为了考虑时间变化,使用了安全势能随时间的变化率,可以表示如下:

正值 表示增加,表示车辆驾驶风险增加 由于移动物体 。驾驶安全指数 (DSI)通过整合车辆的安全势能及其随时间和空间的变化率来量化车辆的驾驶风险,数值越高表示风险越高。为了量化车辆的风险,本文使用了相对驾驶安全指数 (RDSI)。

其中, 代表车辆 i 的标准 DSI 在特定场景中。使用 PET 作为指标对危险情况进行分类,阈值为 3 秒([Amini 等人])。最终计算的 RDSI 是情景风险。
5.3 关键场景优化搜索
5.3.1 辅助目标函数
为了高效搜索关键场景,本文引入了一个辅助目标函数来提供搜索方向。在所有框架中,最关键时刻的风险(即最大风险值)被选为优化目标,如方程[(14)]中精确定义。

为了搜索高频场景,选择曝光频率最高的场景。然后计算此选定方案与其他方案之间的距离,以筛选出更频繁的方案。计算方法如下:

其中 表示搜索方案,而 指上述曝光频率最高的场景。 表示集合 3 的决策变量的维度。 是一个标准化因子,可以通过计算原始场景库中的场景和场景 之间的最大距离来得出.从决策变量的分布来看,可以得出 ,,。
目标函数包括由方程[(15)]计算的暴露频率距离和由方程[(14)]构建的风险代理指标。综合目标函数是通过对两个指标进行加权得出的,如方程[(16)]所示。

5.3.2 优化搜索
关键场景的生成转化为优化和搜索问题,旨在找到在各种参数组合中最小化目标函数的解决方案。将 SM 模型应用于原始场景库后。如果场景的关键性超过预定义的阈值,则认为该场景是关键的,从而确保关键场景在场景空间内具有指定的发生概率。阈值的公式如下:

其中,场景总数 是 43,214,而 设置为 15。采用 4 邻域洪水填充算法来探索关键情景的邻域,直到所有相邻情景都被视为非关键情景,此时搜索结束,并识别出所有关键情景。
如图[7]所示,每个局部临界情景都由中央橙色区域表示。相邻区域(上、下、左和右)被单独计算,以确定是否满足方程[(17)]中概述的条件。例如,在一次评估之后,如果顶部、底部和右侧相邻区域满足条件,则会标记它们并用新颜色填充以表示关键场景。通过此递归过程,场景空间内的所有关键场景都将被识别并适当标记。

图 7.邻域洪水填充图
Ⅵ 实验和结果分析
6.1 车行交互的原始场景库
如表 2 所示,从 SIND 数据集中共提取了 5,885 个原始车辆与行人交互场景,这些场景有助于原始车辆与行人交互场景库。图 8 说明了从每个十字路口提取的有效车辆-行人交互场景中完整行人轨迹的密度分布。需要注意的是,完整的行人轨迹是指数据集中行人的整套数据集,而不是来自交互过程的部分轨迹数据。表 2 显示,长春十字路口的有效车辆-行人交互场景最少,表明冲突的可能性较低。相比之下,西安十字路口的行人轨迹更加分散,这表明冲突的可能性更高,从有效交互场景的数量最多可以看出。重庆和天津的轨迹分布相似,大部分人行道在人行横道内,少数人行道在人行横道外,因此提取的情景数量相似,处于中间范围。
表 2 原始车辆-行人交互场景的详细信息


图 8.行人轨迹密度的分布
6.2. 决策变量的分布
车辆在初次相遇时纵向速度的分布如图[9]所示。在城市交通环境中,车辆的典型低速范围在 10-30 公里/小时之间,而正常的行驶范围为 30-60 公里/小时。[图 9](b)显示了行人在初次相遇时的速度分布。一些速度值超过 3m/s,这是行人速度的上限,可能是由于行人在红绿灯变速之前加速过马路或乱穿马路。[图 9](c)和 9(d)的结果表明,在初次相遇时,车辆与行人之间的纵向距离和横向相对距离不遵循正态分布。这意味着这是行人到达人行横道并选择过马路时刻的时间的高度随机性和不确定性。它受个体行人行为和实时交通状况的影响,这些因素表现出有限的规律性,显着影响车辆与行人相对距离的分布。
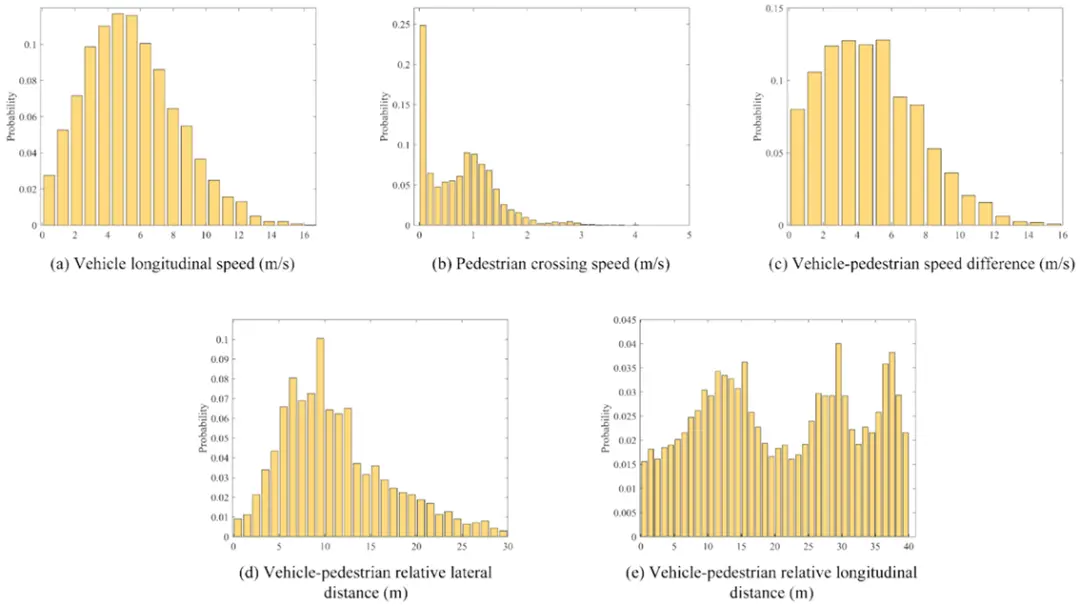 图 9.原始方案中决策变量的统计分布
图 9.原始方案中决策变量的统计分布
6.3. 车行交互的场景暴露频率
如图[10]所示,坐标轴是根据相对横向距离建立的 、相对纵向距离 和行车速度差 .图例表示对应场景的曝光频率。越接近红色的颜色表示曝光频率越高,这意味着在实际交通环境中发生的可能性更高。如图[10](a)所示,可以看出,在原始场景中, 主要集中在 10m 范围内,而 更加分散。这可能是因为 可以近似为从人行横道边缘到车道中间的距离,该距离相对固定。行人在车辆行驶过程中到达人行横道边缘是随机的,将导致 分布分散。三维曝光频率如图[10](c)所示。[图 10](d)显示 主要在 6m/s 以内。在有信号灯的十字路口,拥堵和让行等因素会导致车辆怠速或缓慢行驶,从而导致与行人的速度差相对较小。
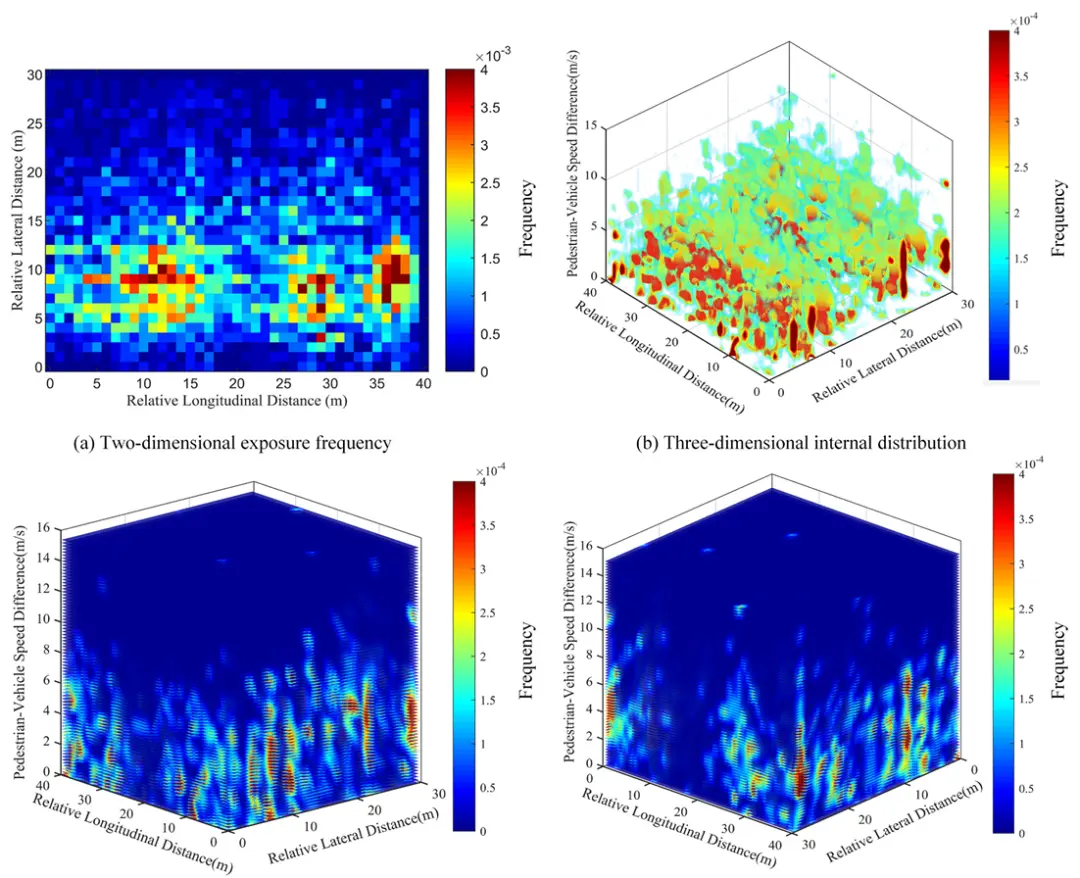
图 10.原始场景中的曝光频率分布
6.4. 车行交互场景的风险分析
[图 11](a)显示了当 TTC 降至 FCW 以下时,车辆施加制动力 时,第一个制动阶段的激活 。在本研究中,这三个阶段对应于三个级别的制动压力,代表在原始场景中观察到的最大减速度的百分位数。减速分布如图[11](b)所示。第一级制动压力 位于第 50 个百分位( )、第二阶段 位于第 75 个百分位数()和第三个完全制动阶段 位于第 95 个百分位数()。每个制动阶段的停止时间使用方程[(4)]计算,如果 TTC 低于该停止时间,则施加制动压力。
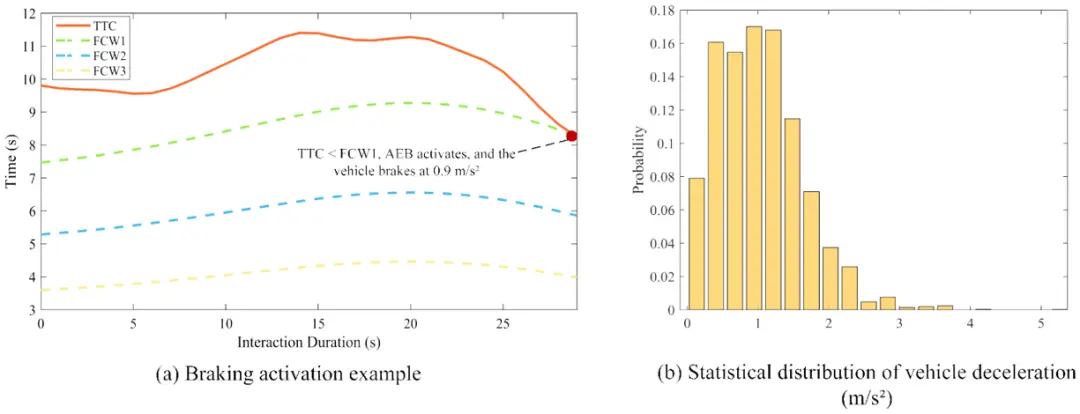
图 11.三级 AEB 模型的激活和制动参数
风险模型的参数设置如[表 3]所示。每个参数的选择都以 Chen、Wang 等人([Chenetal.,2022])的方法为指导,他们使用本研究中采用的相同模型,借鉴中国道路交通安全数据集,校准了虚拟质量和路况影响因素等参数。这些校准参数的有效性通过车辆实验得到验证。
表 3 车辆与行人交互风险模型的参数设置

第 90 个百分位值被选为车辆与行人交互的风险阈值。当给定场景下交互过程中任何帧的风险值超过该阈值时,该场景被视为存在重大风险,被归类为危险场景。最终,从原始情景库中提取了 173 个危险情景。危险场景的具体分布如图[12]中的黄色区域所示。
图 12. 危险场景中的暴露频率分布



 广告
广告 



最新资讯
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
