




 广告
广告





















































自动驾驶汽车测试关键行人场景生成

Ⅲ 研究方法
在本文中,我们基于重要性采样原理和 APF 方法开发了一个面向行人的关键测试场景生成框架 (Wang et al., 2016)。通过比较实验验证了生成的关键情景的准确性和有效性。图 1 说明了本研究中提出的总体框架。

图 1.研究的整体框架
从中国 4 个主要城市的 12 个信号灯交叉路口收集了微观交通数据集,包括不同类型的行人过马路行为,用于形成原始情景库。随后选择决策变量作为特征描述符来描述车辆与行人交互场景。受 Feng et al. (Feng et al., 2021, Feng et al., 2021) 提出的新颖框架的启发,该框架通过车车交互场景生成的重要性采样整合了场景的暴露频率和机动挑战,我们将这一原理扩展到本研究中的行人测试场景生成。本文对暴露频率和风险等级的定义如下:
•曝光频率:真实交通环境中场景的发生概率。
•车辆-行人交互风险:车辆与行人的碰撞概率。
曝光频率是通过分析原始情景库中决策变量的统计分布来确定的。情景风险最初使用三阶段 AEB 模型作为替代模型 (SM) 进行评估,该模型用 AV 对人行横道的响应取代了原始情景库中的车辆行为。在此之后,采用基于 APF 的风险模型来评估集成 SM 的车辆与行人交互场景的风险水平。在定义了关键场景提取的指标后,开发了辅助功能和优化搜索算法,以提高从原始场景库生成关键场景的效率。最终,使用所提出的方法生成的情景构成了关键行人测试情景库。
Ⅳ SIND数据集
4.1 数据记录和统计
车辆和行人在信号灯交叉路口的行为由周期性的交通信号调节,以最大限度地减少冲突。然而,大量研究表明,由于车辆和行人违反交通规则,十字路口的交通事故仍然存在(Shaon 等人,2018 年)。中国人口稠密的大中型城市在信号灯交叉路口表现出复杂的行人行为,其特点是行人与车辆之间的频繁互动。这种情况对 AV 在中国的部署提出了相当大的挑战。为了解决这个问题,对行人、车辆及其在真实十字路口的交互行为进行统计分析、调查和研究以进行测试以进行 AV 测试至关重要。目前,中国没有来自信号路口的开源、高质量的微观交通数据集来支持 AV 测试场景的研究。在本研究中,SIND (Signalized Intersection Dataset) 的轨迹数据是从中国 4 个城市的 12 个信号路口独立收集的,提供了 VRU 的真实行为数据,以支持复杂车对万物交互中的动态特征分析。
数据收集自中国 4 个城市(西安、天津、重庆和长春)的 12 个信号灯十字路口。出于本研究的目的,选择了四个十字路口来生成关键的行人测试场景,如图 2 所示。具体来说,1 号交叉口位于西安,2 号交叉口位于长春,3 号交叉口位于重庆,4 号交叉口位于天津。数据是使用配备 4 K(3840 × 2160)相机的 DJI Mavic 2 无人机录制的,以 29.97 Hz 的频率拍摄镜头。无人机在高空悬停,最大限度地减少了对 VRU 的影响,而其高清摄像头捕捉自然行为(Zhan et al., 2019)。此外,在每个路口的两个相对角落放置手机,以记录交通信号灯状态并更清晰地捕捉行人过马路细节。所有交叉路口均由两相信号灯控制,左转和直行车辆共享相同的绿灯相位。这种设置通常会导致行人和车辆之间频繁的交互和冲突,从而促进了众多车辆-行人交互场景的提取。该数据集包括各种机动车辆,包括汽车、公共汽车和卡车,以及行人、骑自行车者和摩托车手等 VRU。数据是在工作日和节假日的高峰时段(早上、中午和晚上)收集的。在数据收集过程中还考虑了天气状况,包括晴天、多云和雨后。本研究通过检测、校正、跟踪和后处理等步骤构建了 SIND 数据集 (Xu et al., 2022)。表 1 显示了所选站点的详细信息。
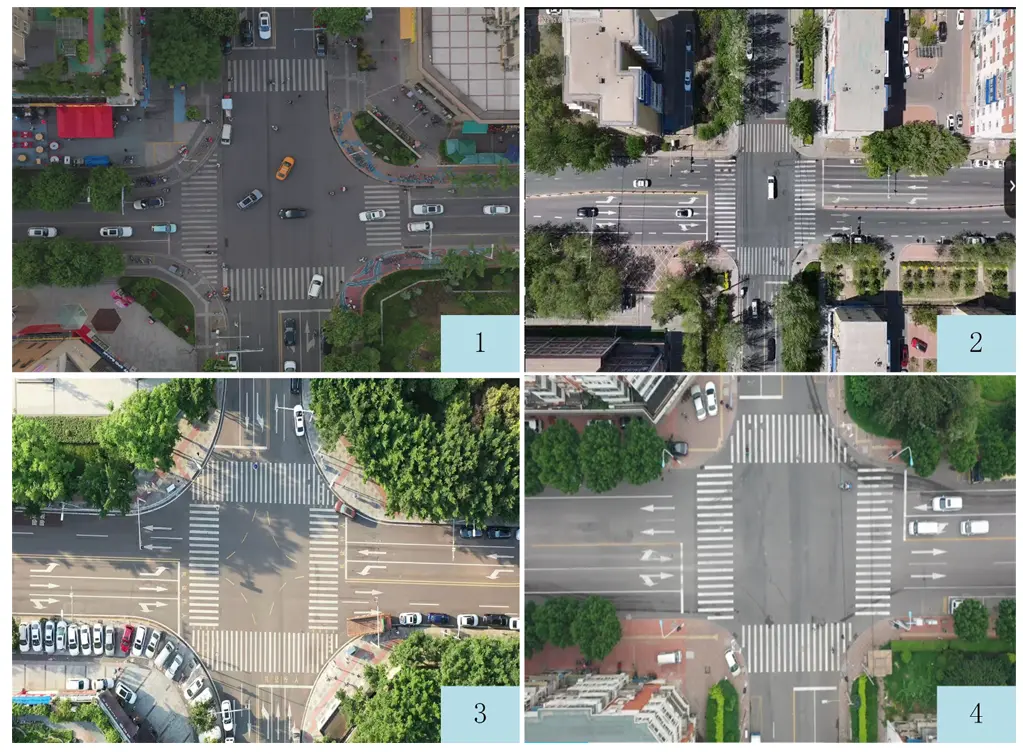
图 2.中国 4 个城市的选定信号路口
表 1 所选站点的详细信息
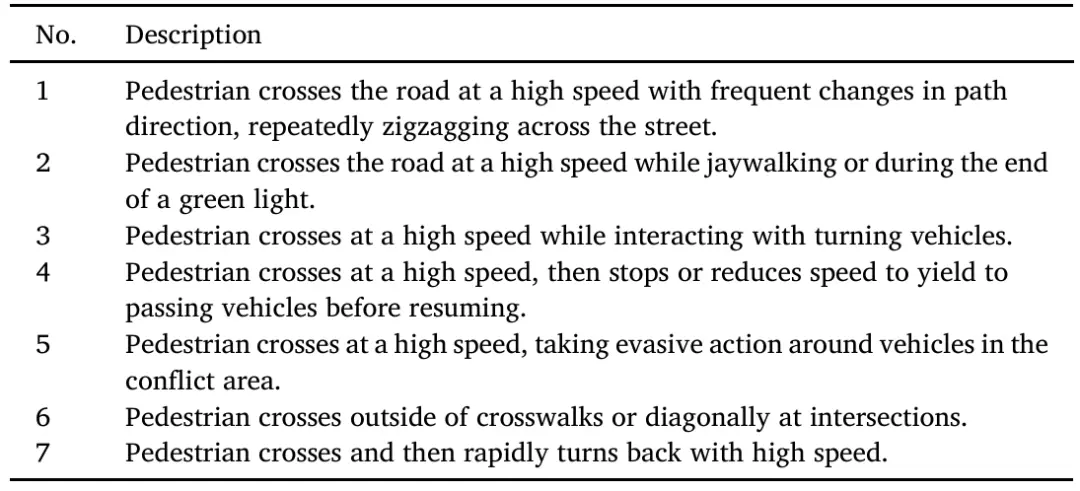
在西安和重庆的数据中,行人在 VRU 中占比最大,而在长春,行人数量与摩托车相当。在天津,行人排名第二,仅次于两轮车。此外,该数据集还包括人行横道的详细特征,例如步行速度、轨迹、交通法规遵守情况、交通信号的观察和判断以及道路交叉期间的群体行为。多样化的数据和行人画像为行人导向的测试和相对研究提供了有价值的支持。
4.2 车行交互场景的数据处理
要从原始数据集中提取车辆与行人交互的危险场景,首先需要识别车辆和行人之间的冲突区域。车行冲突通常发生在行人与车辆之间的距离减少到临界阈值时,这可能导致碰撞或促使任何一方采取规避行动以防止事故发生(Yang et al., 2022)。
基于 SIND 数据集,采用以下规则提取并形成原始的车行交互场景库:
(1)行人和车辆之间存在潜在的冲突区域。
(2)从交互开始到一方退出潜在冲突区域,车辆和行人的时间戳都精确同步。
(3)在交互的最初时刻,行人和车辆都没有在冲突区域内或已经离开冲突区域。
行人和车辆轨迹在同一时间范围内重叠的场景将从原始场景库中提取为有效的交互场景。图 3 显示了十字路口车辆与行人交互冲突的几种常见类型。它突出显示了关键情况,例如当行人与左转或右转的车辆穿过路径时,或者当行人和车辆在十字路口内朝冲突的方向移动时。原始情景库主要是通过从收集的数据集中提取图 3 中描述的情景来构建的。每种冲突类型都经过仔细识别和分类,确保表示所有可能的行人-车辆交互场景。此外,特殊情况(例如行人或车辆的交通违规)也被考虑在内(尽管频率较低)。违规行为包括行人无视交通信号或车辆不给行人让行的情况。尽管此类事件并不常见,但对于开发用于测试目的的综合场景库至关重要。最终,提取结果为长春 555 个有效情景,重庆 805 个有效情景,天津 846 个有效情景,西安 3,679 个有效情景。这些变化确保了行人与车辆交互场景的广泛和多样化表示。

图 3.信号灯交叉路口车辆与行人互动的典型冲突
Ⅴ 关键行人测试场景生成
5.1 决策变量
在 AV 测试的背景下,场景是指被测车辆与环境之间的交互,代表随时间推移的一系列事件(Cai et al., 2022)。它将车辆的作和事件定义为测试目标。场景包括交通参与者之间的动态交互和静态交通状况(Ulbrich et al., 2015)。Bagschik 等人(Bagschik 等人,2018 年)提出了一个五层框架来描述情景元素,后来由 Sauerbier 等人(Sauerbier 等人,2019 年)扩展为包括第六层数字信息。现有的场景构建研究表明,自动驾驶测试场景的要素一般可以分为两类。第一类由固定元素组成,这些元素由 Operational Design Domain(ODD) 确定,例如道路类型、车道编号和其他静态因素。这些元素定义了 AV 预期运行的环境,并对测试场景的动态方面施加了约束。在本研究中,由 ODD 确定的参数表示为 。第二类涉及 ODD 无法通用定义的动态元素,因为它们会根据具体情况而变化。这些因素包括车速、行人移动以及行人与车辆之间的相对距离等因素。由于这些元素是特定于场景的,因此需要有针对性的研究来精确描述它们。
在本文中,我们关注场景的动态元素,特别是那些在人行横道期间出现的元素。我们定义了信号控制十字路口的人行横道的 ODD,行人与从左侧或右侧接近的车辆互动。行人和车辆之间的动态交互以及其他环境因素构成了行人-车辆交互场景的核心。这种互动可以分为三个阶段:行人与车辆之间的初次相遇,行人在双方车辆不断接近时移动的过境阶段,以及一方退出冲突区的最后阶段。
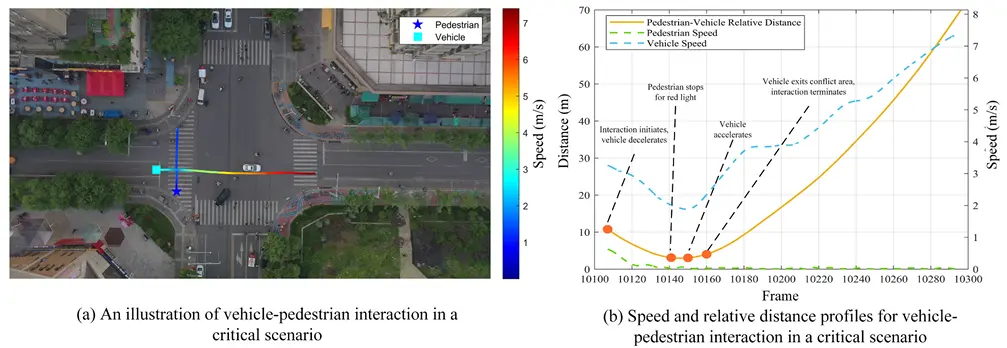
当前方有行人过马路时,自动驾驶汽车的驾驶行为至关重要,不当行为可能会导致潜在的碰撞风险(Lanzaro 等人,2023 年)。主要变量包括行人和车辆的移动特征,例如行人和车辆的过马路速度以及坐标。因此,车辆的纵向速度 、行人的过马路速度 ,它们的相对经距 、相对横向距离 以及行人和车辆之间的速度差 被选为代表场景特征的决策变量,如方程(1)所示。行人与车辆交互场景中的决策变量如图 4 所示。

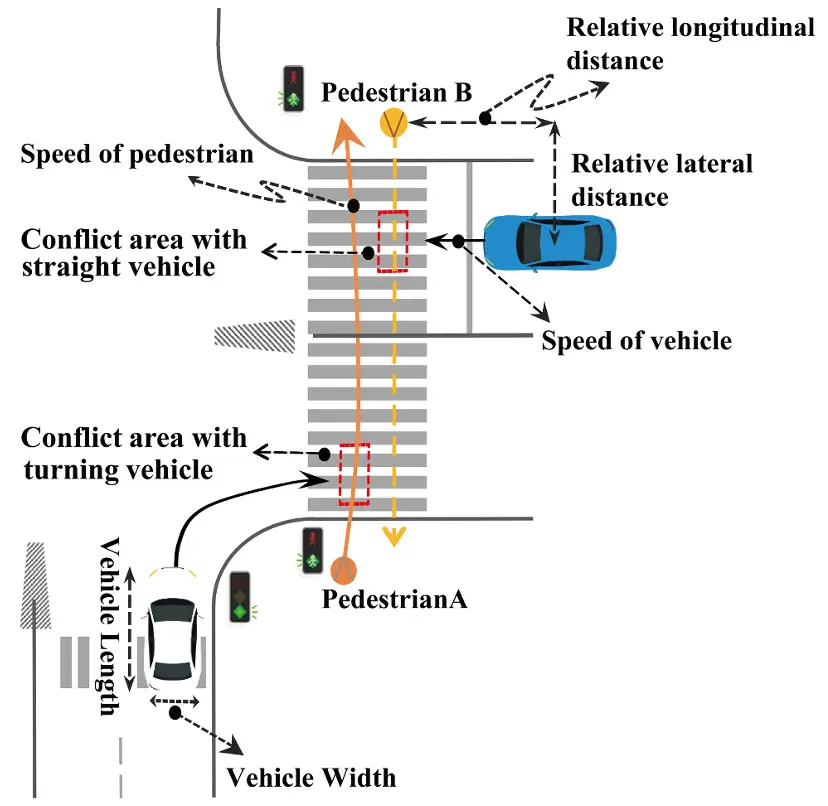
图 4.车辆-行人交互场景的决策变量
5.2 重要性函数
在生成场景的过程中,需要一种临界度评估方法来确定每个场景的重要性,并从原始场景库中筛选出关键场景。目前,大多数研究都集中在安全方面,使用替代安全措施(SSM) 等指标。它们不考虑场景的发生概率,这意味着这些场景容易发生,并且在实际流量中很常见。根据 ISO 26262 的汽车安全完整性等级 (ASIL),定义了三个决定性因素,例如严重性、暴露和可控性,以评估与汽车系统组件相关的风险。因此,本文测量了情景危急性 与暴露频率和风险级别。场景曝光频率 通过分析原始车行交互数据获得,情景风险等级 由 SM 和具有一定阈值的风险模型进行评估。重要性函数被定义为两个因子的乘积,如方程(2) 所示。
5.2.1 曝光频率
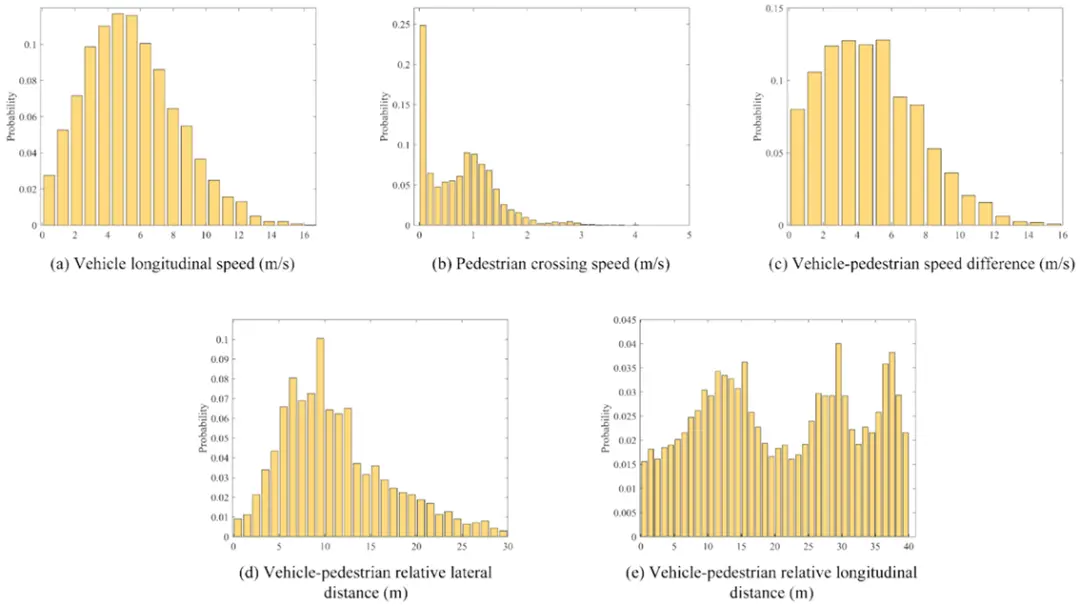
暴露频率是指情景发生的概率,它由每个单元内情景相对于总情景的比例决定。在计算中,速度差 行人与车辆之间初次相遇在所有场景下都在范围内(0,16)。横向距离 的范围是(0,30]和纵向距离 的范围是(0,40]。所有参数范围都从原始数据集中派生为离散单位,以步长为 1 进行离散化。
5.2.2 车行交互场景的风险模型
该场景后续时间步长的风险是未知的,无法使用直观的指标迭代计算。因此,集成了新颖的 SM 和实时风险评估模型,以识别车辆和行人的潜在风险交互。
•代理模型(SM)
SM 的构建是关键测试场景生成的关键步骤,可以代表 AV 的感知、决策和控制功能。三阶段 AEB 系统已经过测试和证明,具有更好的适应性和驾驶舒适性,同时减少了误报和碰撞严重程度(Zhou and Wang, 2022) (Ye et al., 2024)。在本文中,我们使用三阶段 AEB 模型作为 SM。
在三级 AEB 系统中,初始动作由前方碰撞警告 (FCW) 触发,该警告根据随 AV 速度变化的停止时间激活 。停止时间是指从最初施加制动开始的持续时间 完全停止,并持续与当前碰撞时间 (TTC)进行比较。人类驾驶车辆的制动过程一般分为三个阶段:对应于制动反应时间的均匀运动阶段 ,一个变化的减速阶段,在此期间减速度增加 和均匀的减速阶段 ,如方程(3) 所示。
被测试的 AV 的制动反应时间最短,可以忽略不计(Zhao et al., 2019)。因此,本文只考虑了均匀减速阶段的制动时间(Zhao et al., 2023)。方程 (4) 表示 AV 的停止时间。

行人和车辆之间的潜在冲突区域是根据他们轨迹的重叠区域、车辆的长度和宽度来确定的,如图 4 所示。当行人首先通过冲突区域时,TTC 由方程 (5) 计算。
其中 表示车辆宽度,而 表示当前时间。当车辆首先通过冲突区域时,TTC 由方程 (6) 计算。



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
