




 广告
广告





















































自动驾驶汽车测试关键行人场景生成

为了验证所提出的方法的有效性,选择最小 TTC 和 PET 作为基线进行比较。最小 TTC 是指整个交互过程中的最低 TTC 值,代表整个交互中最危险的时刻。最终的比较分析结果如图[18]所示。在这项研究中,PET 大于 3 秒且 TTC 大于 2.72 秒的情景被归类为低风险情景([Sheykhfard 等人,2023]年)。在所提出的框架生成的关键情景中,30 个情景的 PET 大于 3s,22 个情景的最小 TTC 大于 2.72s。关键场景的分布主要集中在车行距离 15m 和速度差 4m/s 范围内,少数场景呈现分散分布,车行距离和速度差逐渐增大。

图 18.关键场景中 PET 和 TTC 的比较
本文通过 3 个关键情景进一步分析和验证了上述结论。三种情况的 PET 和最小 TTC 值如下:对于第一种情况,PET=28.9s,最小 TTC=3.9s;对于第二种情况,PET=3.4s,最小 TTC=10.9s;对于第三种情况,PET=2.4 秒,最小 TTC=1.7 秒。这些场景的相应图分别显示在[图 19]、[图 20]和[图 21]中。
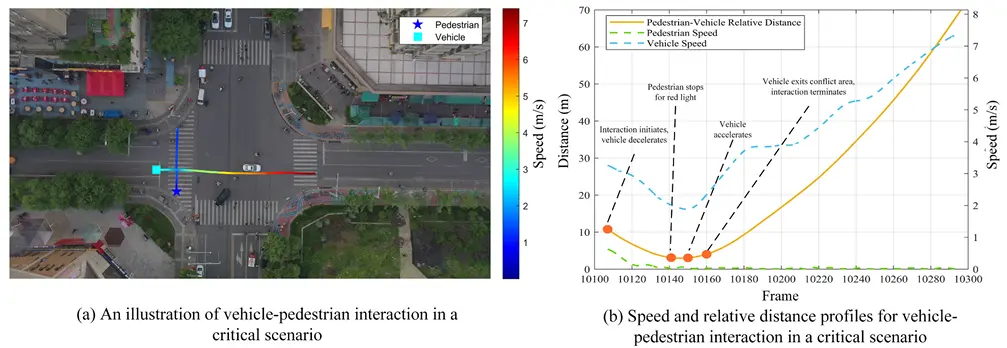
图 19.被 PET 归类为安全但被 Minimum TTC 归类为危险的关键场景
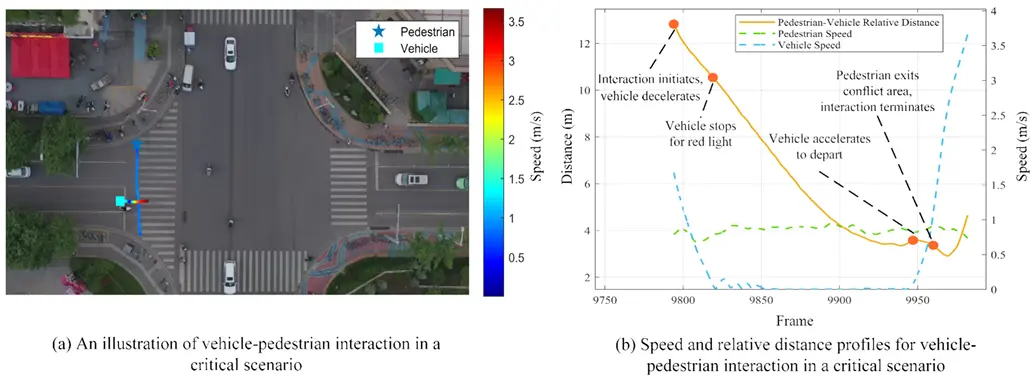
图 20.被 PET 归类为危险但被 Minimum TTC 归类为安全的关键场景
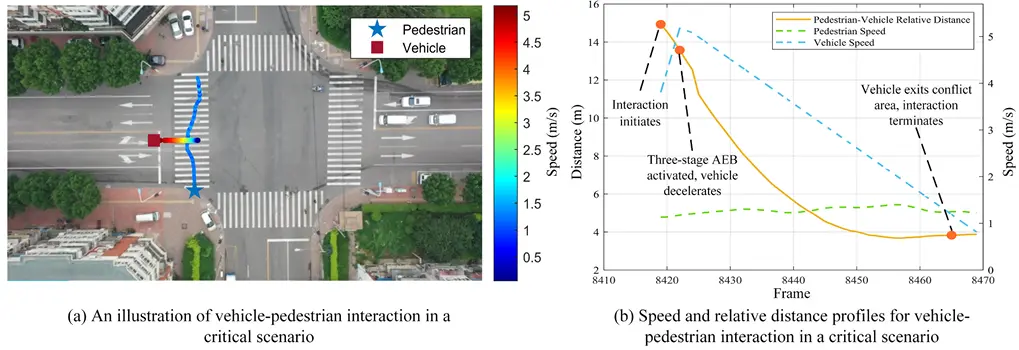
图 21.被 PET 和 Minimum TTC 都归类为危险的关键场景
在对 PET 大而最小 TTC 小的场景分析中,很明显,较大的 PET 值是由于行人因红灯而长时间等待而产生的。同时,车辆在初次遇到行人后不久穿过冲突区域,导致 PET 更大。但是,在初始交互的那一刻,行人和车辆非常接近,导致最小 TTC 值较小。车辆在检测到行人有过马路意图时减速,只有在确认行人已停止等待后才会恢复加速。这表明车辆在交互中认识到了一定级别的风险。尽管这种情况的 PET 更大,TTC 更小,但它仍然与测试高度相关,因为它们展示了车辆必须应对潜在交互风险的情况,即使行人的行为没有立即表明迫在眉睫的危险。此类场景对于评估车辆评估和应对动态真实世界风险的能力至关重要。
在对[图 20]所示场景的分析中,其中 PET 较小且最小 TTC 较大,观察到小 PET 是由于车辆在行人过马路后加速并迅速离开冲突区域造成的,而行人与车辆之间的初始距离相对较短。然而,较大的最小 TTC 是由于车辆在初次相遇时减速并在行人过马路时等待红灯。车辆在行人清理后不久才开始加速并离开冲突区域。尽管车辆因红灯而等待行人过马路,但它在行人完全离开冲突区域之前就开始加速。这表明,即使车辆暂时停止,这种情况仍然具有一定程度的风险,因为如果行人没有完全清理该区域,车辆的过早加速会带来潜在的冲突。
在 PET 和最小 TTC 都很小的关键场景中,如图[21]所示,可以观察到行人在整个十字路口中保持高速,车辆在初次相遇时也以高速接近。根据 SM 计算,在此过程中激活了三阶段 AEB。当当前的 TTC 短于所需的停止时间时,车辆检测到行人并开始制动,最终减速并离开冲突区域,从而标志着互动的结束。在这种情况下,行人和车辆都保持高速,并且随着交互的进行,它们之间的距离保持相对较短。因此,PET、TTC 和本文中提出的风险模型都将这种情况确定为高风险相互作用,强调了由于涉及的距离短和速度而存在的潜在危险。
通过对上述关键情景的分析,很明显,本文中提出的风险模型有效地解决了依赖单个 SSM 的局限性。通过整合多个因素,该模型成功地识别了具有重大冲突的交互场景,从而对车辆与行人的交互风险进行了更准确和全面的评估。
Ⅶ 结论
为了进一步评估自动驾驶汽车在真实交通环境中的安全性和适应性,本研究以中国交通微数据集 SIND 为基础,提出了一种生成关键行人测试场景的方法。目标是为 AV 测试提供典型的、高价值的车辆与行人交互场景。本文的主要发现如下:
(1) 提出了一种基于 APF 方法的车-行人交互风险等级评估方法。实验表明,在该方法生成的 50 个关键场景中,PET 指标识别了 20 种风险场景(占总数的 40%),而 TTC 指标识别了 28 种风险场景(占总数的 56%)。相比之下,所提方法成功捕获了所有关键场景,展示了卓越的识别能力。结果表明,所提出的方法在识别复杂的车-行人交互场景中的风险方面更加全面和准确。
(2) 行人在信号场景中的行为通常涉及显著的不确定性和随机性。关键测试场景涵盖更广泛的行人特征,例如绕行、减速以避开车辆和乱穿马路。此外,其中 30 个关键场景的行人最高速度超过 1 m/s,保持较高的过境速度。这为在多样化和动态的行人互动中测试 AV 提供了强大的支持。
(3) 在生成的 50 个高价值测试场景中,一个关键发现是较高的行人速度和较短的行人与车辆之间的相对距离与较高的风险水平密切相关。这种洞察力为 AV 中决策和控制算法的迭代优化提供了宝贵的基础。
本研究的局限性在于,车辆与行人交互场景的描述性特征目前仅限于相对距离和相对速度,而没有考虑更详细的现实世界特征,例如行人性别、年龄和分心行为。目前,SIND 数据集不包括行人的性别和年龄等信息,但未来的研究将侧重于改进数据集以纳入这些附加因素。这将有助于为 AV 创建更全面的行人测试场景库。
参考文献



 广告
广告 



最新资讯
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
