




 广告
广告





















































分布式驱动车辆轨迹跟踪与稳定性多智能体协同控制研究
2025-03-19 08:55:44· 来源:智能运载装备研究所 作者:杜志彬

1.3 前轮主动转向及差动转向结合


考虑如下图4所示的主动转向与差动转向相结合的情况:
图4 前轮主动转向及差动转向结合的车辆受力分析示意图
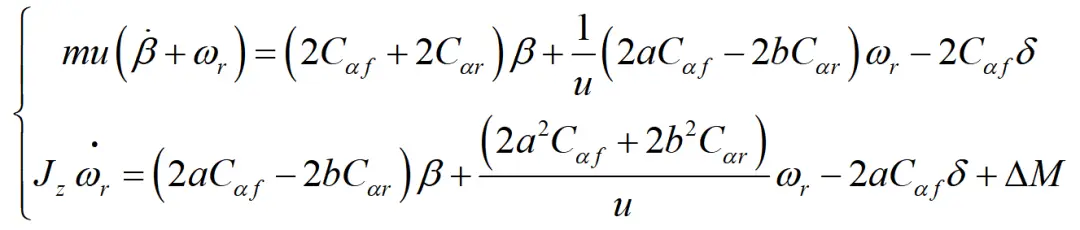
与前述中二自由度模型推导假设相同,推导可得如下二自由度模型:
(12)
将上式改写为状态方程,具体如下:
(13)
令 、
、 ,求系统状态的稳态值,可得:
,求系统状态的稳态值,可得:
(14)
其中, ,
, 。
。
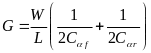
若已知期望横摆角速度 及当前车辆的前轮转角δ,由式(14)可得到此时若想跟踪期望横摆角速度,所需要施加的附加横摆力矩值为:
及当前车辆的前轮转角δ,由式(14)可得到此时若想跟踪期望横摆角速度,所需要施加的附加横摆力矩值为:
 (15)
(15)
其中,G与纯差动转向中的增益D一致,W与主动前轮转向中的稳态横摆角速度增益一致。
下面将探究是否可以通过施加不同大小的附加横摆力矩来改变车辆在稳态时的转向特性。经过分析,可得横摆角速度与转向特性之间的关系为:
(16)
因此,当车辆为前轮主动转向与差动转向相结合时,转向特性为中性转向时应当满足如下等式:
(17)
结合式(16)、(17),可知若要使得转向特性为中性转向,所需施加的附加横摆力矩为:
 (18)
(18)
因此,可得附加横摆扭矩与车辆转向特性之间的关系:
 (19)
(19)
综上,可以通过改变附加横摆力矩的大小,使车辆在不同转向特性之间进行切换,在某些场景下可以极大的提升车辆的操纵稳定性。



 广告
广告 



最新资讯
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
