




 广告
广告





















































四轮独立转向分布式驱动电动汽车单轮转向失效行驶稳定性控制
2025-02-27 15:49:37· 来源:博创汽车科技

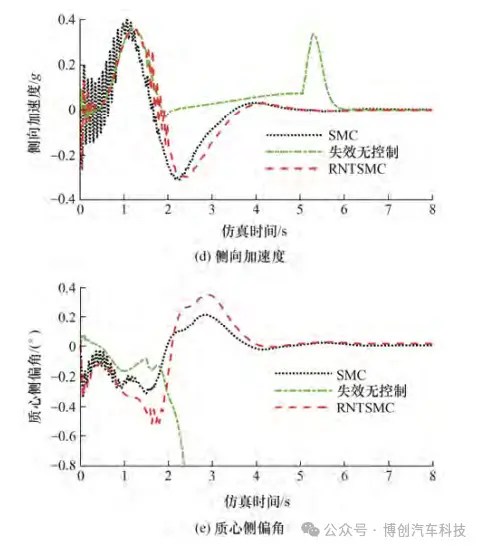
图 11 1.5 s 失效时试验控制结果对比
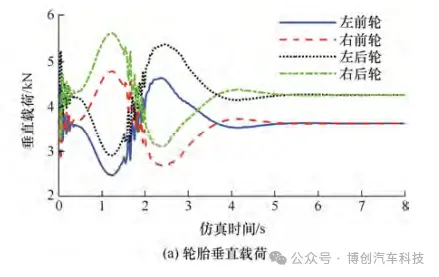
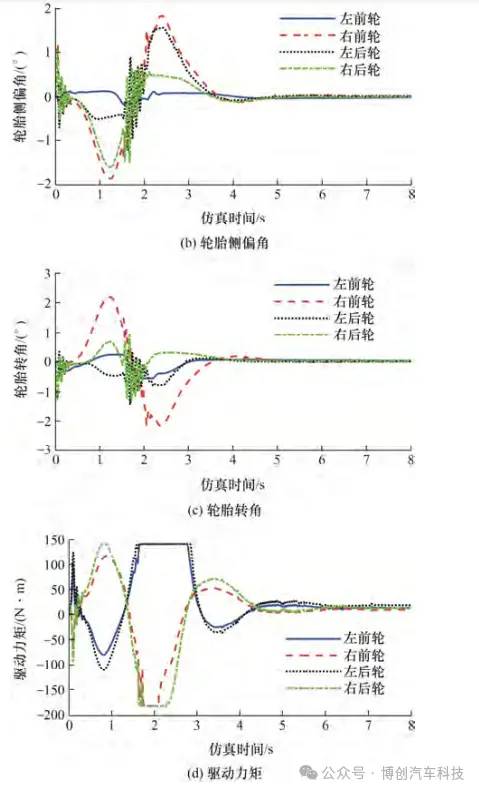
图 12 1.5 s 失效时 RNTSMC 控制试验结果
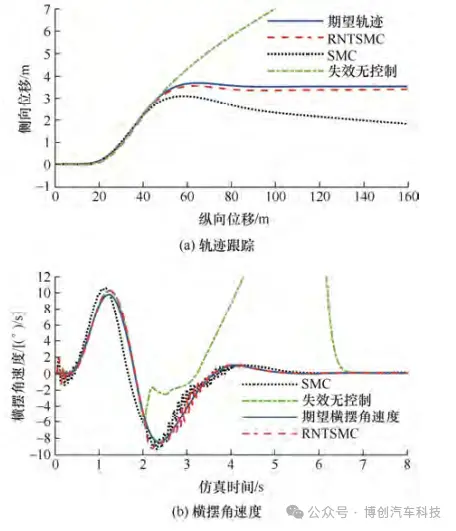
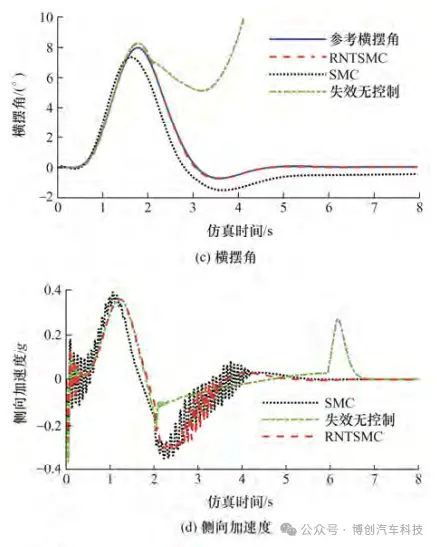
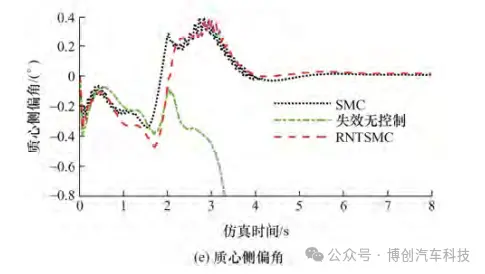
图 13 2 s 失效时试验控制结果对比



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
