




 广告
广告





















































电动汽车“原地掉头”技术解析
2025-01-03 09:26:28· 来源:汽车电子与软件 作者:北湾南巷

02、原地(坦克)掉头功能的基本原理
原地(坦克)掉头功能是电动汽车的一项智能驾驶辅助技术,能够使车辆在极其狭窄的空间内完成调头操作,甚至可以实现车辆在原地不移动的情况下绕自身中心轴旋转,解决传统车辆因转弯半径受限而无法灵活掉头的问题。
这一功能的核心在于通过动力系统独立控制左右两侧车轮,实现车辆的反向扭矩输出,从而完成原地旋转操作:
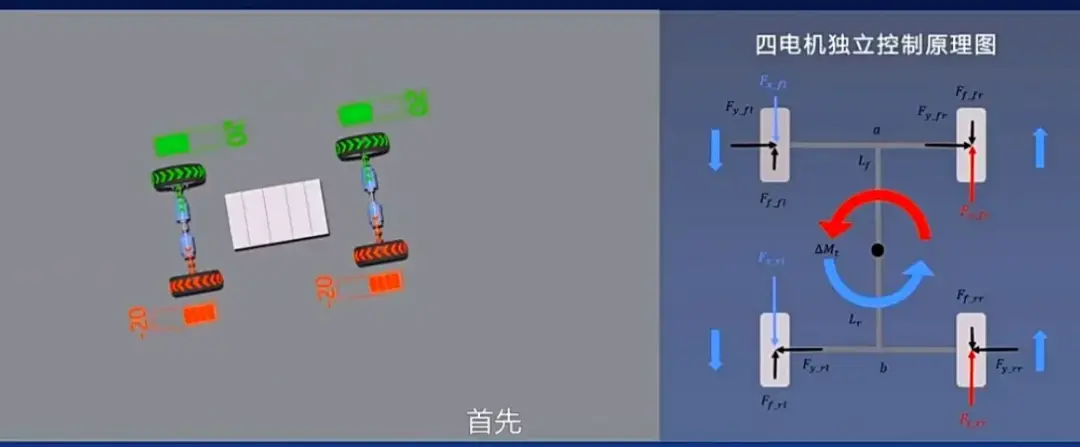
这种方法使车辆无需向前或向后移动即可完成掉头,大幅提高了空间利用率和车辆的灵活性,特别适合在狭窄道路或复杂地形中使用,同时降低了驾驶员的操作难度。
2.1 电动汽车的优势
电动汽车因其动力系统的独特性,为原地(坦克)掉头功能的实现提供了显著优势:
电驱动系统的精确控制能力
动力分配的灵活性,无需复杂的机械结构改动
原地(坦克)掉头功能的实现得益于电动汽车在动力控制方面的技术优势。通过精确灵活分配动力,电动汽车能够轻松完成传统车辆难以实现的掉头操作。这一功能不仅展现了电驱动技术的灵活性和高效性,也为电动汽车在狭窄空间中提供了显著的竞争优势。
- 下一篇:基于阶次分析和齿轮重合度优化的分析
- 上一篇:长沙将发放首批功能型无人车示范应用编码



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
