




 广告
广告





















































基于carsim的分布式驱动汽车原地掉头功能仿真
2024-11-27 14:11:49· 来源:智能运载装备研究所 作者:林龙

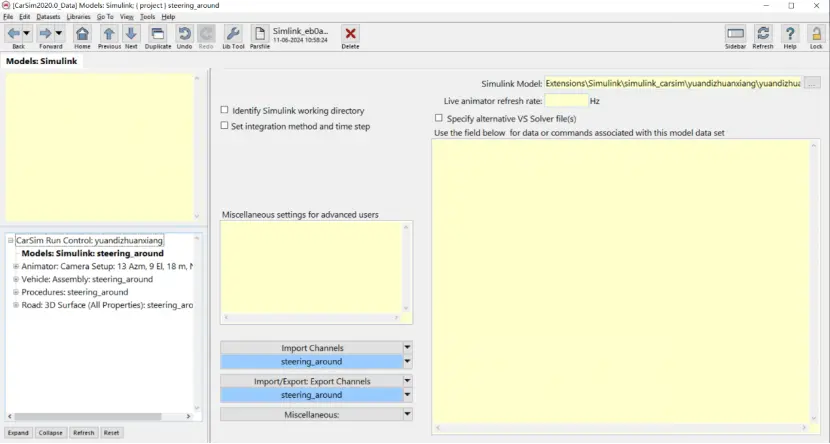
用同样的方式对输出口进行命名操作,完成后得到下图所示界面:
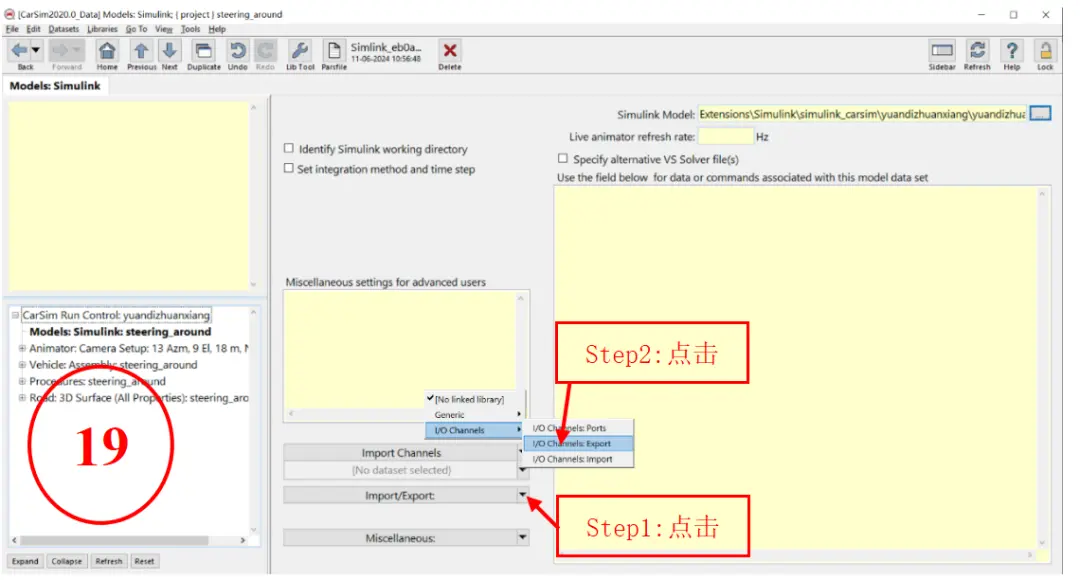
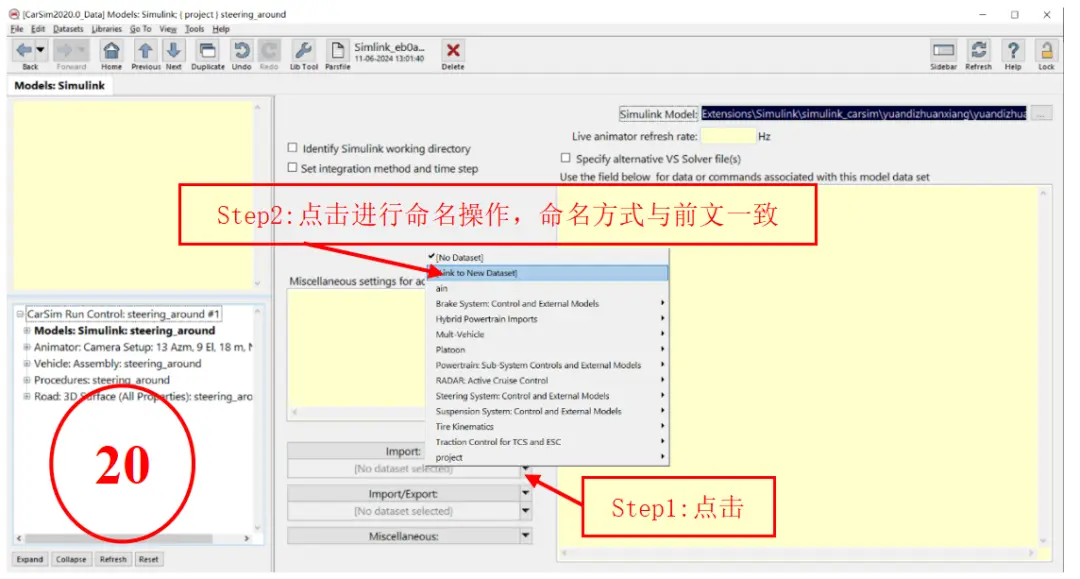
对输入变量进行选择:
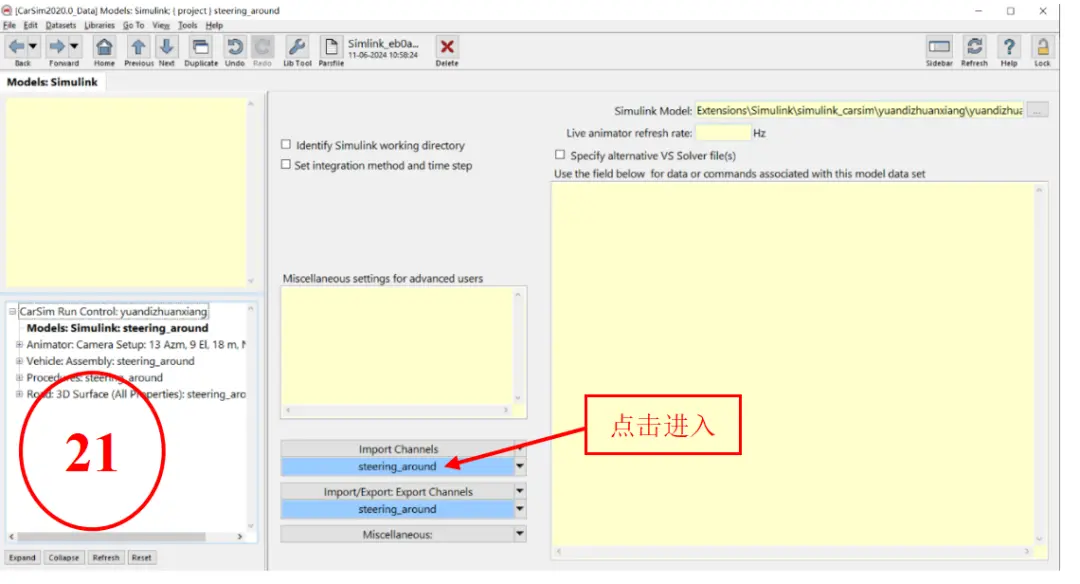
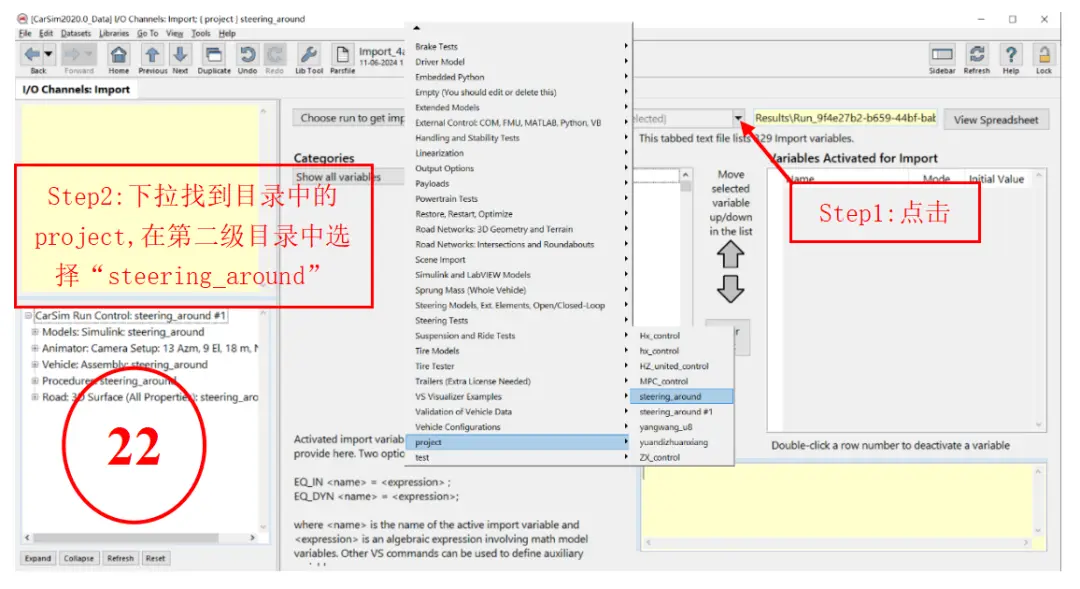
选择输入变量
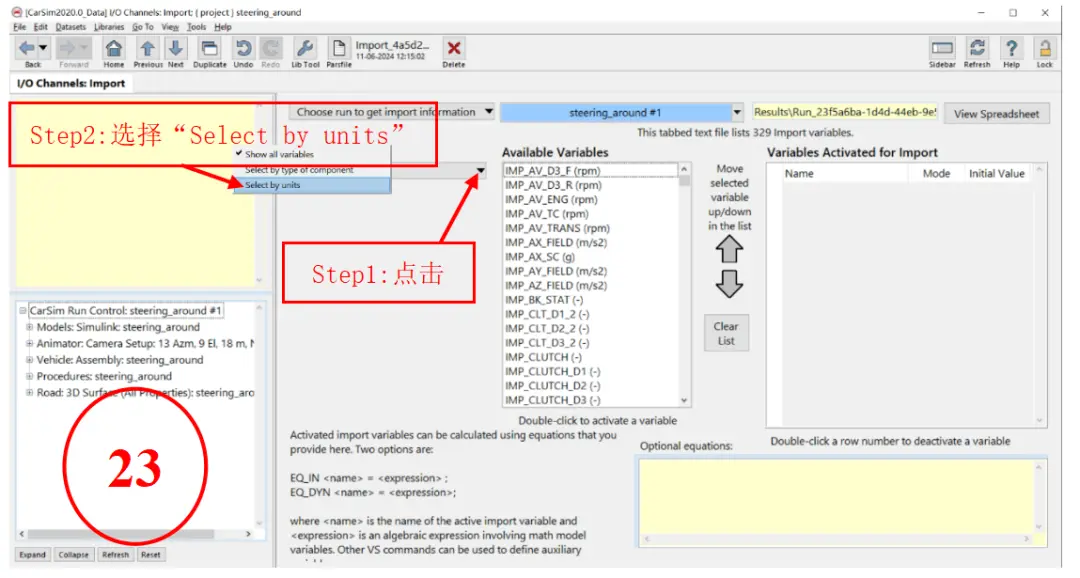
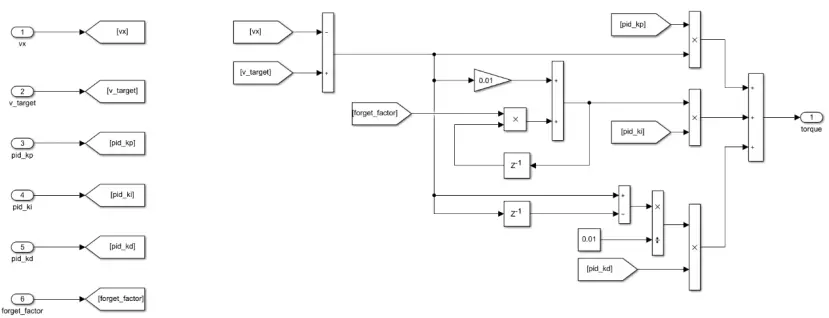
因为,控制车辆原地转向的是四个轮端扭矩,因此原地转向的控制量为四个车轮的扭矩:

返回上一级进行输出变量选择,以对车辆运动状态进行观测:
- 下一篇:汽车安全传感器的解决方案
- 上一篇:飞轮储能提升充电速度,突破电网容量限制-ZOOZ



 广告
广告 编辑推荐




最新资讯
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
