




 广告
广告





















































一文了解自动驾驶系统中主要被测传感器

作者:北斗(10年智能座舱及导航娱乐系统开发管理经验、3年自动驾驶产品化经验、5年自动驾驶模拟仿真测试环境构建经验)
无论是自动驾驶(AD)还是高级辅助驾驶系统(ADAS),都是依靠高精度摄像头、毫米波雷达、激光雷达等感知传感器对车辆周边环境进行感知识别来实现的。
伴随人工智能(AI)技术的发展,自动驾驶车辆也进入了人工智能(AI)时代。如果说AI是自动驾驶车辆的脑子,那这些高精度感知传感器就是是自动驾驶车辆的眼睛。本文对自动驾驶车辆是感知传感器及其相关情况进行介绍。
■核心传感器①:视觉摄像头的功能・构造・应用
一般的自动驾驶(AD)还是高级辅助驾驶系统(ADAS)的视觉摄像头会配置在驾驶室内部,朝向车辆行驶方向。前向摄像头透过风挡玻璃对前方的环境进行拍摄,获取的视频数据基于人工智能(AI)和图像处理技术,图像处理单元对拍摄图像进行实时的解析。数据经过处理后,车辆前方的车辆、行人以及障碍物被识别出来。交通道路标志也会被摄像头识别出来,用于系统对车辆纵向速度的控制。行车道中的白色车道线也会被识别出来,用于系统对车辆横向方位的控制,避免车辆违规压越车道线。

图1 单目摄像头结构示意图
单目摄像头在对目标检测测距方面存在一定的劣势,而双目摄像头因为提供了复数的摄像头视点,可以进行同步拍摄,所以测距方面能力会更好一些。摄像头作为感知传感器不单出应用于车辆前方的环境感知,同时也可以应用于车辆后向情况感知、车辆两侧盲区检测、车辆行驶道路路面情况解析等。
受恶劣天气、夜间、逆光的影响大
摄像头拍摄照片、视频的效果,基本和人的眼睛看到东西的原理是相同的。在夜间环境、逆光环境、浓雾、暴雨、暴雪等恶劣天气情况下,摄像头对物体的感知能力会受到影响,甚至无法识别。

图2 暴雪等恶劣天气中的车辆行驶状态
激烈的竞争推动立体摄像头的开发
摄像头主要有单目摄像头和立体摄像头两大分类。对目标进行多角度拍摄的立体摄像头的开发推进,自动驾驶系统和高级辅助驾驶系统搭载立体摄像头后,可以有效防止车辆交通事故的发生。所以,目前有部分自动驾驶车辆已经搭载了这种类型的传感器。
特斯拉仅使用高精度立体摄像头实现自动驾驶
自动驾驶系统中除了高精度摄像头之外,还包括激光雷达、毫米波雷达等进行传感器融合使用。美国新能源汽车厂家特斯拉针对完全自动驾驶的构想是,单纯以类似人眼的高精度摄像头作为感知传感器,对车辆行驶周边环境进行感知。高精度摄像头和人工智能(AI)作为自动驾驶主体,配合3D高精度地图实现了车辆的全面自动驾驶。
■核心传感器①:毫米波雷达的功能・构造・应用
自动驾驶技术中另一个广泛使用的传感器就是毫米波雷达。所谓毫米波是指微波的波长,毫米波雷达发出毫米波对外部环境进行探测,利用毫米波回波进行被测物的距离、方位等特性的分析检测。目前应用比较广泛的毫米波雷达,使用频率是77GHz、24GHz。
毫米波雷达的构成基本上由雷达框体、雷达电路板以及雷达外壳组成。雷达框体一般在雷达的中间层,用于固定支持雷达电路板,同时也起到一定的散热和屏蔽作用。雷达电路板一般分为两块,一块是RF电路、一块是电源电路,目前也有采用单芯片集成方案的雷达采用的是一块电路板。雷达外壳包括雷达罩(前壳)和雷达后壳,前壳一方面起到导流罩作用,一方面也保护雷达电路板不受外界损害,由于需要对雷达毫米波的通过性不能产生影响一般使用非金属材料,波后盖材料用于固定毫米波雷达,多选用树脂或金属材料,也兼备一部分散热功能。
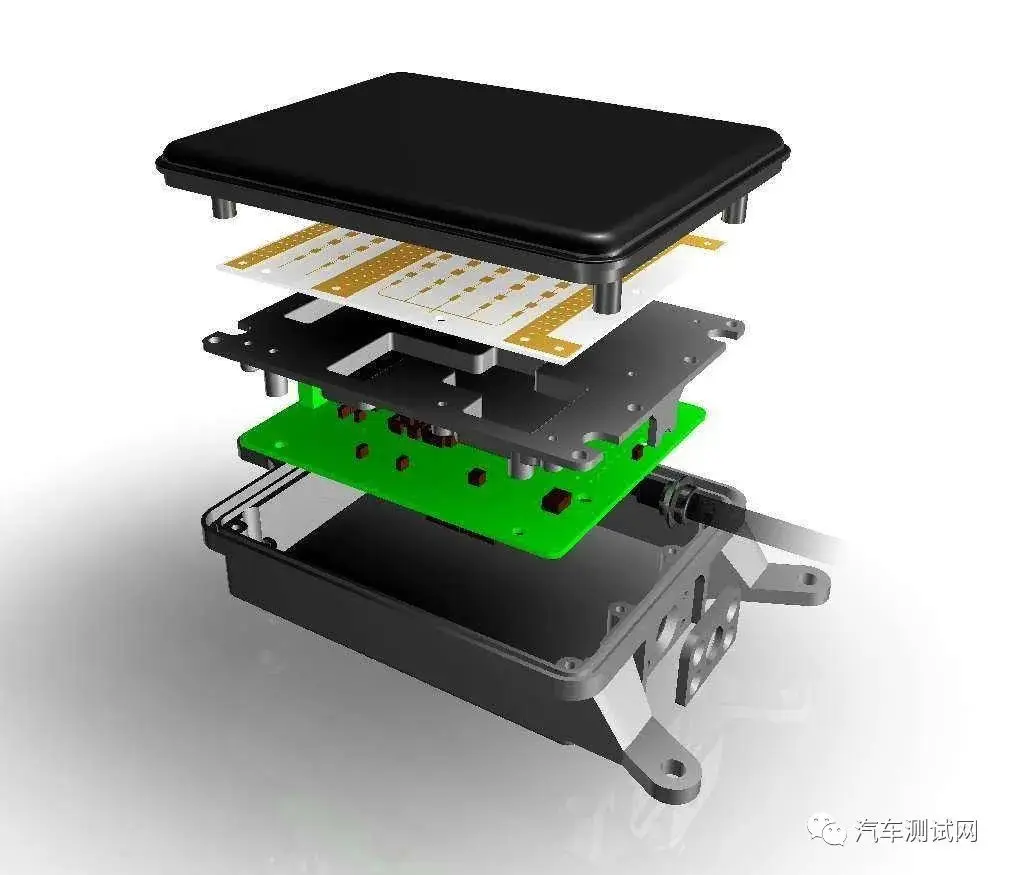
图3 毫米波雷达结构分解示意图
对反射率弱的物体感知困难
毫米波雷达作为传感器,感知介质依靠毫米波。毫米波受天气、光照等环境因素影响较小,在外界环境变化时,依旧可以维持原有感知能力,探测出目标的特性,这是此类传感器的优势。但对于反射率低的物体,比如瓦楞纸箱、发泡塑料等材料,感知能力就变得较差,这也是此类传感器的性能边界。
L2+整车搭载率提升雷达需求增加
根据国内经济研究所的调查,随着“自动驾驶L2+”整车搭载率扩大,毫米波雷达的市场需求已经变得异常活跃。ADAS是实现汽车智能化、网联化的重要条件,目前中国ADAS渗透率相对较低,预计至2025年中国ADAS渗透率有望超过90%,毫米波雷达作为ADAS重要配件,有望受益于ADAS渗透率提升进一步放量。
为了实现L2+级解放双手的自动驾驶功能,系统不仅需要搭载前向摄像头和前向毫米波雷达,还需要在车辆的四周安装短距离探测雷达,以扩大车辆周围的检测范围,从而提升感知能力和准确性。随着自动驾驶等级提升,将带动毫米波雷达搭载量提升,目前L1/2级别车辆为智能汽车市场主流,单车毫米波雷达搭载量一般为1-3颗,随自动驾驶等级向L2+迈进,单车雷达搭载量将增至5颗以上,与ADAS渗透率提升双轮驱动毫米波雷达放量。智能驾驶车辆需求推动ADAS渗透率提升,毫米波雷达将成为未来汽车标配。
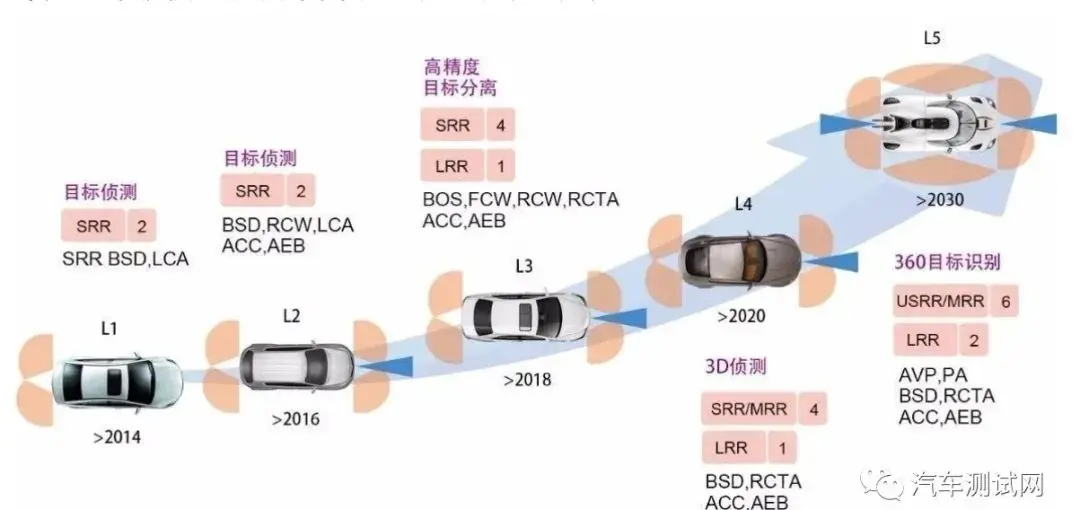
图4 毫米波雷达搭载趋势示意图
■核心传感器③:激光雷达的功能・构造・用途
LiDAR其实是“Laser Imaging Detection and Ranging(激光图像检测和测距)”、“Light Detection and Ranging(光检测和测距)”的缩写。激光雷达利用脉冲状照射激光(红外线),根据被对象物反射回来的时间来测量距离。
激光雷达也被称为扫描LiDAR传感器,它不仅可以测距也可以检测被测物的方位。检测原理是使用可动反射镜,来改变缩小后的激光方向,并进行快速扫描,通过物体反射后进行检测。与毫米波雷达相比,LiDAR使用了波长更短的红外线作为感知介质,所以感知的空间分辨能力更强。

图5 激光雷达组件示意图
反射率弱的物体感知不受影响
因为LiDAR使用的是激光,所以电波反射率低的瓦楞板纸箱、木材、发泡泡沫塑料等也可以被检测到。具备高空间分辨率的扫描LiDAR除了检测对象物距离和方位以外,还能够实现对对象物之间的自由空间的检测。
高性价比LiDAR研发量产竞争激烈
LiDAR的开发初期,作为弥补摄像头和毫米波雷达的缺点的感知传感器受到了广泛关注,但由于其价格昂贵一直没有真正实现量产化。大部分激光雷达制造商,将激光雷达在无人机、机器人、无人车、轨道交通等具体设备及相关领域上的应用作为主要研究方向,逐步渗透ADAS市场。同时,各公司也逐渐采用固态和混合固态激光雷达来替代传统机械式激光雷达。
由于激光雷达领域竞争激烈,所以各制造商也在竭尽所能地革新各自的雷达产品,同时激光雷达市场也充斥着并购行为。相应的,汽车制造商和一级零部件供应商也在如何部署和为哪些应用部署激光雷达的问题上存在重大分歧,这也进一步促使激光雷达产业内部竞争激化。
■结论:三种主要传感器协同发展
从上面的介绍不难看出,三种主要感知传感器从工作原理到应用边界,都有各自不太的优势和劣势。而在自动驾驶场景下,自动驾驶系统为了确保L3及其以上无人驾驶功能的实现,至少需要三种传感器系统:摄像头、雷达和激光探测,而且单种类需要存在复数使用需求,将传感器分布在车辆的不同位置上共同协同感知,才能应对各种突发场景情况。所以从自动驾驶产业发展需求角度出发,目前三种传感器的发展快速增长状态,后续自动驾驶车辆必定需要多种感知类型协同发展。从测试角度上,更多类型和数量的传感器应用,也为测试系统提出了更高的要求。



 广告
广告 



最新资讯
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
