




 广告
广告





















































自动驾驶系列科普 | OpenDRIVE静态场景语言的通用架构——坐标系概况

科普,就像一座灯座,照亮探索未知世界的道路。在这个信息爆炸的时代,需要将真实、准确的科学知识以简洁、易懂的方式传递给读者,更全面地认识科技发展带来的便利。
本篇是自动驾驶系列科普的第八篇,将主要介绍ASAM OpenDRIVE标准静态场景语言的坐标系。让我们一同踏上神奇的科普之旅,探索无限可能。
01 坐标系概况
OpenDRIVE中可以使用的坐标系如下图所示:
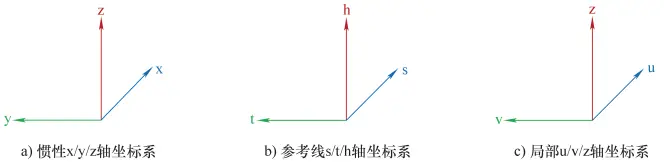
OpenDRIVE可使用的坐标系
若无另外说明,对局部坐标系的查找与定位将相对于参考线坐标系来进行。对参考线坐标系位置与方向的设定则相对于惯性坐标系来开展,具体方法为对原点、原点的航向角/偏航角、横摆角、翻滚角和俯仰角的旋转角度及它们之间的关系进行详细说明。

OpenDRIVE中坐标系之间的相互关系
02 惯性坐标系
根据ISO 8855标准规定,惯性坐标系是右手坐标系,其轴的指向方向如下:x轴表示右方;y轴表示上方;z轴表示指向绘图平面外。
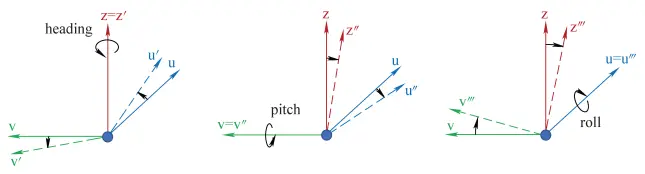
以下惯例适用于地理参考:x轴表示东边;y轴表示北边;z轴表示上方。通过依次设置航向角/偏航角(heading)、俯仰角(pitch)和横摆角/翻滚角(roll),元素(如物体、标志等)可被置于惯性坐标系中。
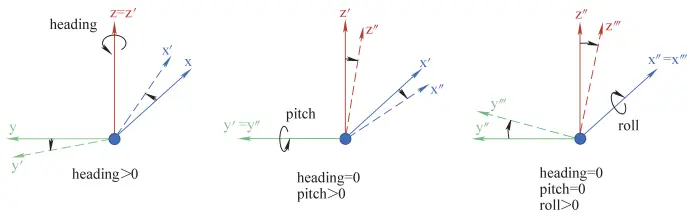
含有旋转定义的惯性坐标系

惯性坐标系(带旋转定义)
x′/y′/(z′=z)指的是以航向角/偏航角围绕z轴旋转x/y/z轴之后的坐标系。坐标系x″/(y″=y′)/z″指的是以俯仰角围绕y′轴旋转x′/y′/z′轴之后的坐标系。最后,坐标系(x′″=x″)/y′″/z′″在用横摆角/翻滚角旋转 x″/y″/z″后获得。
03 参考线坐标系
参考线坐标系同样也是右手坐标系,应用于道路参考线。
s方向跟随着参考线的切线方向。这里需要说明的是:参考线总是被放置在由惯性坐标系定义的x/y平面里。t方向与s方向成正交。在定义完垂直于x 轴和y轴、朝上的h方向后,整个右手坐标系才算完成。被定义的自由度如下图所示。
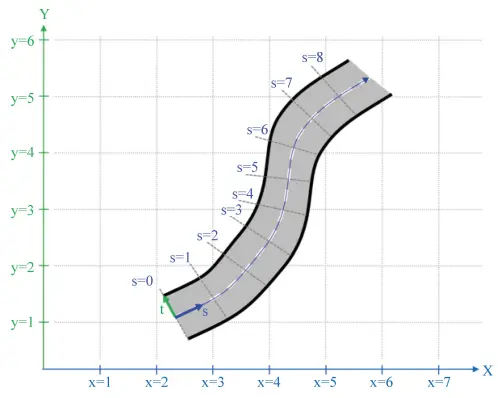
参考线坐标系
s表示坐标沿参考线,以m为单位,由道路参考线的起点开始测量,在xy平面中计算(这里不考虑道路的高程剖面)。t表示侧面,在惯性x/y平面里正向向左。h表示在右手坐标系中垂直于st平面。

参考线系(带旋转定义)
与惯性系相似,s′/t′/h′与s′″/t′″/h′″指的是围绕航向角/偏航角和横摆角/ 翻滚角旋转后得到的坐标系。如下图所示,通过提供原点坐标以及相对于惯性坐标系原点的方向(航向角/偏航角),参考线坐标系可被置于惯性空 间中。
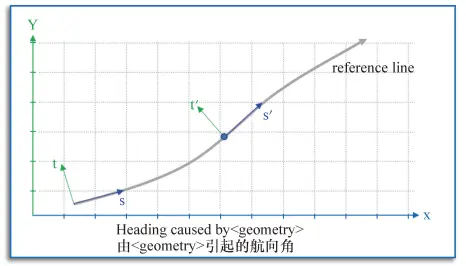
航向角/偏航角在参考线中
超高程导致参考线内产生横摆角/翻滚角,如下图所示。
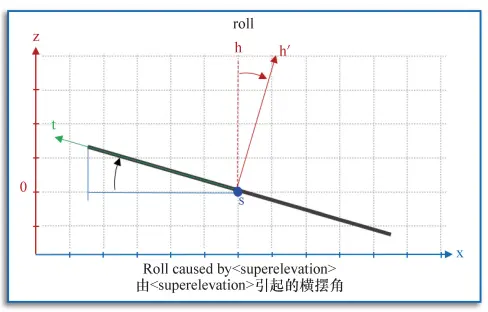
横摆角/翻滚角在参考线中
俯仰角在s/t/h轴坐标系中不可能出现,参考线的高程如下图所示。高程对 s的长度不产生影响。
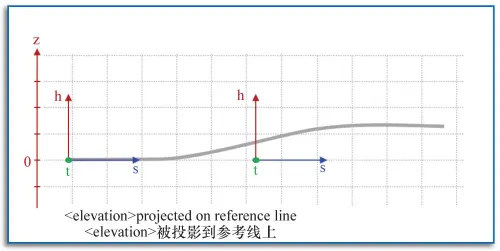
在参考线中的高程
04 局部坐标系
根据ISO 8855标准,局部坐标系是右手坐标系,其轴的指向方向如下(以 下内容适用于非旋转坐标系):u表示向前匹配s。v表示向左匹配t。z表示向上匹配h。可通过依次设置航向角/偏航角、俯仰角和横摆角/翻滚角,将元素(例如物体)置于局部坐标系中,如下图所示。

局部坐标系(带旋转定义)
带航向角/偏航角、俯仰角和横摆角/翻滚角的局部坐标系
下图展示了对应角的正轴与正方向。局部坐标系只能通过以下方法被置于参考线空间中:在参考线坐标系中提供局部坐标系的原点和相对于参考线坐标系、局部系原点的方向(航向角/偏航角)。
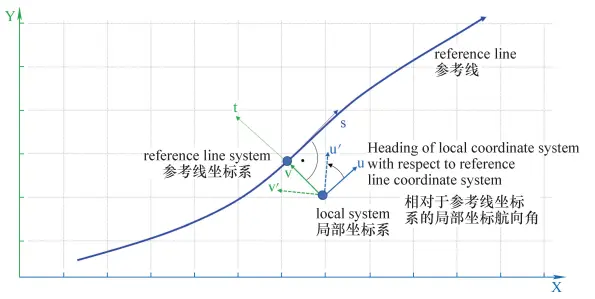
相对于参考线坐标系的局部坐标系
惯性坐标系、参考线坐标系和局部坐标系将在OpenDRIVE中同时被使用。



 广告
广告 



最新资讯
-
使用 HEADlab 测量电流
2026-01-23 17:13
-
奇石乐持续推进全球碳中和战略
2026-01-23 16:47
-
吉利汽车,新公司落户湖北!
2026-01-23 16:12
-
直播|车载光通信技术路线及测试挑战
2026-01-23 13:05
-
重磅!工信部明确新车准入须开展30000km可
2026-01-23 13:05
