




 广告
广告





















































四轮转向汽车操纵稳定性建模与仿真

在20世纪80年代末,开始有装备四轮转向系统(4WS)的量产车型投放市场,其主要目的是提高汽车在高速行驶或在侧向风力作用时的操作稳定性,改善在低速下的操纵轻便性,以及减小在低速停车时的转弯半径。四轮转向系统具有以下显著的优点:
首先,在转向时能够基本保持车辆质心侧偏角为零,且能够改善汽车对转向盘输入的动态响应特性,在一定程度上改善了横摆角速度和侧向加速度的瞬态响应性能指标,明显改善车辆高速行驶的稳定性。当在高速行驶中转向时,四轮转向系统通过后轮与前轮的同相转向,增加车辆的转向不足,能有效降低/消除车辆侧滑事故的发生几率,明显改善车辆高速行驶的稳定性及安全性。
其次,缩小车辆低速转向时的转弯半径。在低速转向时,车辆因前后轮的反向转向能够缩小转弯半径达20%。四轮转向技术使大型车辆具有如同小型车辆的操纵及泊车敏捷性。
第三,当汽车在紧急转向避障时,四轮转向汽车的机动运动能力更强,避障行驶的自由度更高。针对左右车轮转角可以独立控制的车型,当汽车直线行驶和紧急制动时,两个后轮的角度会往里靠,形成“内八字”的形状,这样可以增强行驶稳定性,并且还能给刹车提供额外的辅助。
第四,四轮转向系统的冗余安全性更高,如当前轮转向系统失效时,后轮转向系统还可以继续工作,保证车辆具有可靠的转向能力。
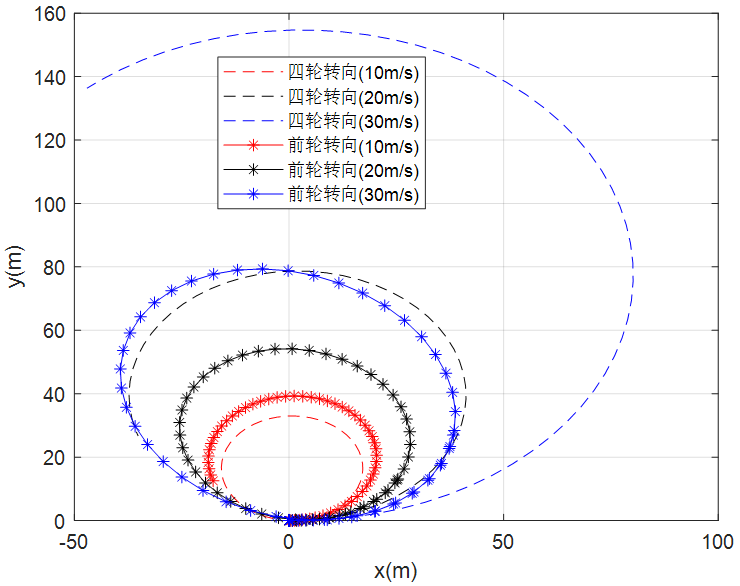
本文以二自由度模型为例,对四轮转向车辆的转向特性及操纵稳定性进行分析,并与传统的前轮转向车辆进行仿真对比,最后,给出一个关于车辆横向运动速度和横摆角速度的线性二自由度模型,并基于该模型设计四轮转向车辆的圆周轨迹跟踪控制器。
四轮转向系统工作原理
4WS系统的基本原理是:利用车辆行驶速度和驾驶员输入的方向盘转角信号来控制前后轮的转角输入,以提高车辆的通过性、操纵性和稳定性。对4WS车辆来说,当车辆低速行驶时,为减小转弯半径,通常后轮转向方向与前轮相反,即所谓的“反向转向”;在高速转向时,为了提高车辆的稳定性和加快车辆的侧向响应速度,后轮将产生与前轮同向的转向角,即所谓的“同向转向”。
(1)低速时的反向转向
(2)高速时的同向转向
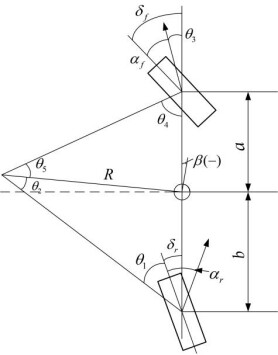
图1 4WS汽车的转向运动
4WS系统对后轮转角的控制不仅与车速有关,而且还与前轮转角、横摆角速度等车辆运动状态有关,其控制策略通常采用电子控制系统来实现。如下图所示,车辆转向时将前轮转向信号和车辆运动状态发给转向控制单元(SCU),SCU进行分析计算后,控制前后轮转向执行机构执行相应的转向动作,通过转向传动机构驱动前后轮发生偏转;同时,SCU实时监测车辆运动状态,实时调整后轮转角,进而根据车辆实际运动状态实现车辆四轮转向。
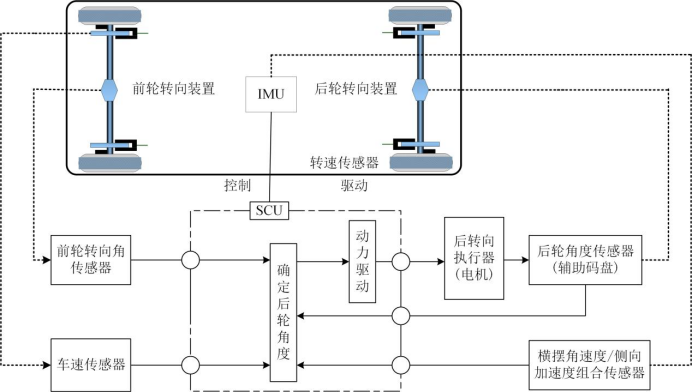
图2 4WS控制系统工作原理
本质上讲,四轮转向的优点来源于系统对后轮轮胎侧向力独立控制的能力。由于四轮转向车辆可同时独立控制前后轮的侧偏角和轮胎侧向力,因而可提高车辆的瞬态响应,并改善车辆的转向控制能力。下面基于二自由度模型,对4WS系统的动力学特性进行分析,进而说明4WS车辆是如何通过后轮转向角控制来改善车辆操纵稳定性的,并以此为基础讨论四轮转向控制策略的设计问题。



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
