




 广告
广告





















































百度Apollo车路协同自动驾驶典型实践场景和技术优势

AD盲区问题描述:
如图6.16所示,受限于单车智能的传感器感知角度,在出现静态障碍物或动态障碍物(如大型车辆)遮挡时,车辆难以准确获取盲区内的车辆或行人的运动情况。
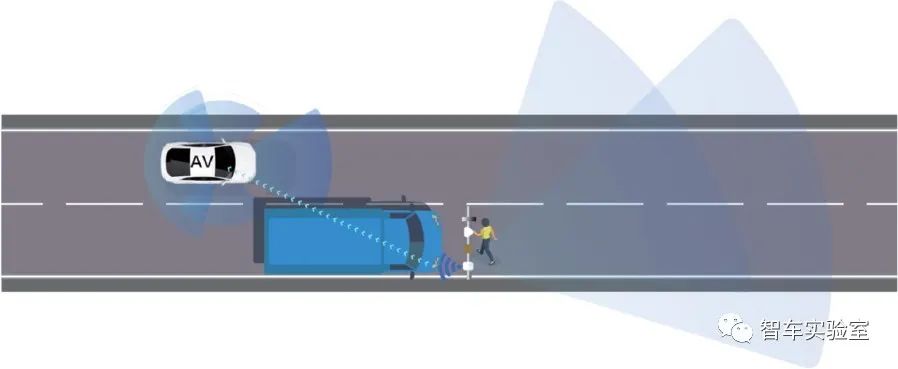
图 6.16 静态盲区:行人突然闯入
VICAD动静态盲区协同感知:
如图6.17所示,通过路端多传感器部署,实现对多方位、长距离连续检测识别,并与车辆感知进行融合,实现自动驾驶车辆对盲区内车辆或行人的准确感知识别,车辆可提前做出判断和决策控制,进而降低事故风险。

图 6.17 静态盲区非机动车/行人鬼探头协同感知
(三)动态盲区/遮挡协同感知
-
左转/掉头盲区或遮挡协同感知:
如图6.18所示,车辆(蓝白色)在路口左转或掉头时,有大卡车或公交车(粉色长多边形)产生了动态盲区遮挡住了后面的车辆,通过VICAD全量协同感知,车辆可以获取盲区车辆的运动情况,避免了车辆急刹或事故的风险。
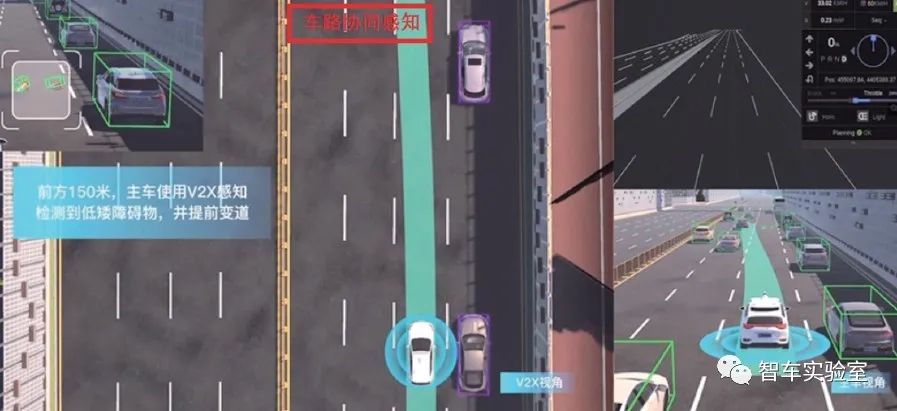
图 6.18 左转/掉头盲区或遮挡协同感知
(2)大车遮挡协同感知:
在车辆直行时,左侧大车遮挡住了横穿的电动车,通过VICAD动静态盲区协同感知,车辆可以提前获取盲区车辆、非机动车或行人的运动情况,避免了车辆急刹或事故的风险(如图6.19和6.20)。

图 6.19 路口大车遮挡场景

图 6.20 路口大车遮挡车路协同感知
(四)超视距协同感知
AD超视距感知问题描述:
受限于车载传感器的类型、感知范围、分辨率等因素,车辆对超出车载传感器覆盖范围的交通运行状况、交通参与者或障碍物检测结果不稳定,容易出现感知不到、感知跳变等问题。
VICAD超视距协同感知:
如图6.21所示,通过路端多传感器部署,实现对多方位、长距离连续检测识别,并与车辆感知进行融合,实现自动驾驶车辆对超视距范围内车辆或行人的准确感知识别,车辆可提前做出判断和决策控制, 进而降低事故风险。
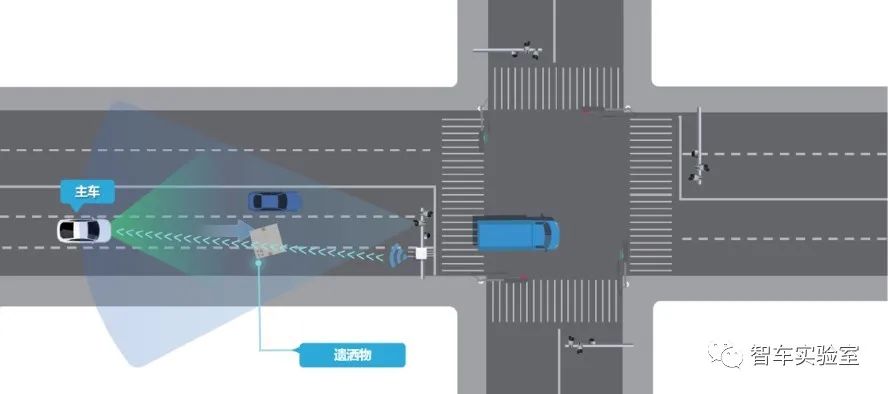
图 6.21 超视距协同感知
- 下一篇:汽车车身结构设计分析浅析
- 上一篇:地图参考位置协议



 广告
广告 



最新资讯
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
