




 广告
广告





















































功率分流式混合动力系统的加速性能分析

功率分流式混合动力汽车通过由两个行星排机构和两个电机构成的功率分流装置(Power split de⁃ vice,PSD)将发动机输出的功率进行分流,分别通过机械传递路径与电传递路径传递到输出轴。
由于功率分流式混合动力汽车的发动机转速和转矩与系统输出轴的转速和转矩能够完全解耦,从而可以实现发动机工作点的优化,提升发动机的燃油效率;并且通过电机可以回收动能、在特定工况下关闭发动机纯电动驱动。因此,相较于传统动力汽车,功率分流式混合动力汽车可以实现较好的燃油经济性。
发动机转速和系统输出轴转速解耦,使发动机在低车速时也可以输出最大功率,加之有两个电机的助力,混合动力汽车的动力性获得一定程度上的提升,从而可以使搭载小排量发动机的混合动力汽车也能够拥有较好的动力性。
研究人员在功率分流式混合动力系统的构型设计时,往往需要遍历各种可行的构型,分析其经济性与动力性指标。但由于混合动力系统的动力学方程与其构型相关,因此,在分析动力性时,需要有一个最大输出转矩的系统的解法。
本文中利用构型矩阵对双行星排结构可以组成的功率分流式混合动力系统进行了构型合理性的筛选,并提出了拉威娜行星排的构型矩阵的构建方式。结合杠杆法对各种构型的双行星排功率分流系统能够输出的最大转矩提出了系统的解法,并将结果用于加速性能仿真,找出最优构型。
一、混合动力系统构型的筛选
1.1 构型矩阵的构建
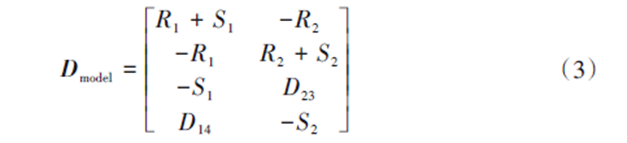
双行星排结构的混合动力系统构型矩阵的一般表示形式为
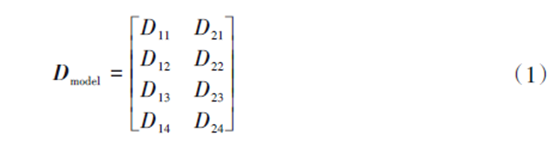
式中,D1j代表第一个行星排(PG1),D2j代表第二个行星排(PG2);Di1、Di2、Di3和Di4分别对应4个动力源,即发动机(Eng)、输出端(Out)、电机1(MG1)和电机2(PG2)。
构型矩阵Dmodel的构建方法是将第i个行星排与第j个动力源连接的节点系数填入对应的元素中,然后将其余元素赋值为0。节点系数的定义如表1所示,其中,Ri为外齿圈齿数,Si为太阳轮齿数。

图1是拉威娜行星排的结构简图,可以将这种行星排理解成是一种特殊的双行星排,即PG1和PG2共用一个外齿圈和一个行星架,而PG2的太阳轮与外齿圈的转速经过两次换向所以方向相同。拉威娜行星排PG1的节点系数如表1所示,PG2的节点系数定义如表2所示。下文中均以一般形式的双行星排结构进行示例。
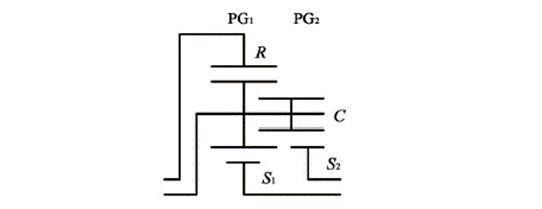
图1 拉威娜行星排的结构简图
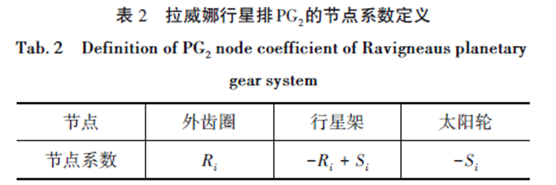
图2所示为一种双行星排混合动力系统的示意图,R1、C1、S1 分别代表PG1的外齿圈、行星架和太阳轮;R2、C2、S2分别代表PG2的外齿圈、行星架和太阳轮。以图2中所示构型为例,构建其构型矩阵Dmodel的步骤如下:
(1)PG1连接的动力源分别是: Out-R1、Eng-C1、MG1-S1,在构型矩阵的第一列中分别填入对应的节点系数
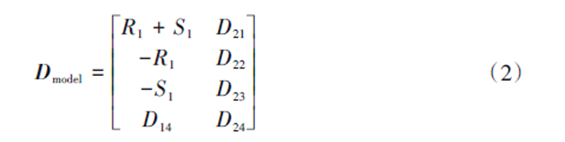
(2)PG2连接的动力源分别是:Eng-R2、Out-C2、MG2-S2,在构型矩阵的第二列中分别填入对应的节点系数
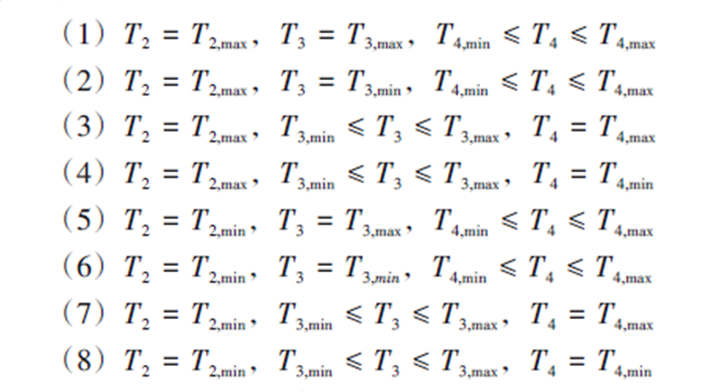
图2 一种双行星排混合动力系统构型
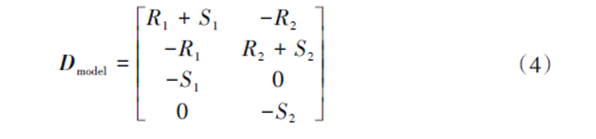
(3)最后,将其他的元素赋值为0,即得到构型矩阵为
1.2 构型矩阵的排列组合
功率分流式混合动力系统根据其功率分流的方 式可分为:输入型功率分流系统(Input-split sys⁃ tem)、输出型功率分流系统(Output-split system)和复合型功率分流系统(Compound-split system)。当构型矩阵的两列元素分别都只有一个0时,该构型为复合型功率分流系统;当构型矩阵的元素有一列 有一个0,另一列有两个0时,该构型为输入或输出型功率分流系统;不存在两列元素都有两个0的构型矩阵;不存在任意一列元素有超过两个0的构型矩阵。在构建结构矩阵时,我们认为R1和R2、S1和S2不都相同。
1.2.1 复合型功率分流系统的构型矩阵
复合型功率分流系统的构型矩阵两列元素都只有一个0,即分别将每一列的3个节点系数填入该列的4个元素的排列组合。排列组合数为24*24=576种。表3是复合型功率分流系统构型矩阵的一个示例。拉威娜行星排由于其结构特征,只能组成复合型功率分流系统。

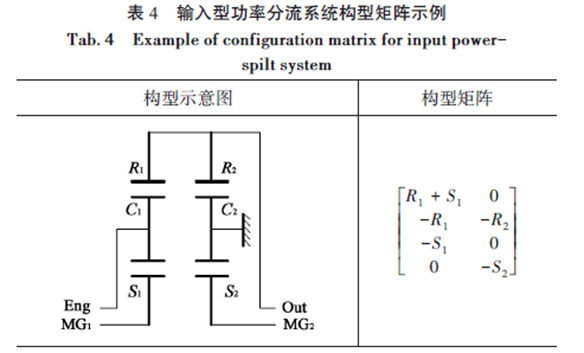
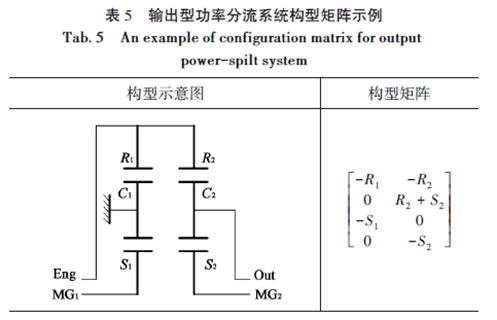
1.2.2 输入和输出型功率分流系统的构型矩阵
输入和输出型功率分流系统的构型矩阵有一列有一个0,另一列有两个0,有12种组合方式;只有一个0的一列,要将3个节点系数填入4个元素中,有24种排列组合方式;有两个0的一列,首先从3个节点系数中选取2个,然后填入4个元素中,有3∙12中排列组合方式。排列组合数共有1728种。表4、表5分别是输入和输出型功率分流系统构型矩阵的示例。
1.3 构型矩阵的筛选
复合型、输入型和输出型功率分流系统共计存在2304种构型,其中有一些不合理的构型,主要分为3类:
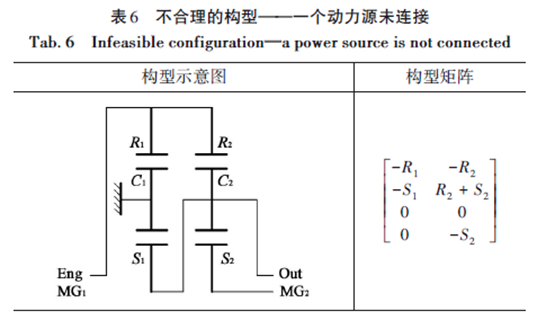
(1)构型矩阵中任意一行有两个0。由构型矩阵的定义可知,当任意一行有两个0时,对应的动力源没有与任何行星排节点相连,这显然是一种不合理的构型,如表6所示。
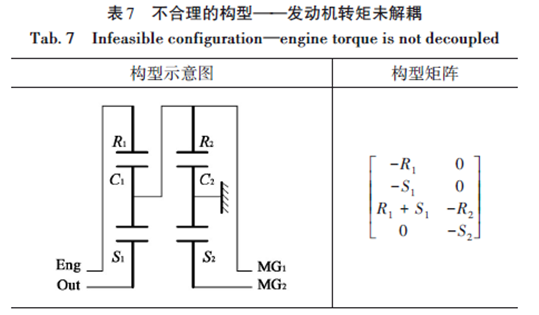
(2)构型矩阵中任意一列的第一和第二个元素都为0。这种构型使得发动机转矩无法与输出转矩解耦,因此也是一种不合理的构型,如表7所示。
(3)构型矩阵中任意一列的第三和第四个元素都为0。这种构型使得发动机转速无法与输出转速解耦,因此也是一种不合理的构型,如表8所示。
以上3类构型可以通过分别检验构型矩阵上半部分和下半部分的秩来进行排除,即
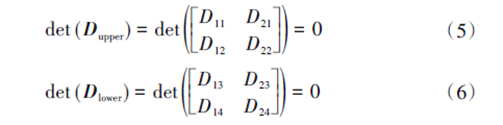
通过排除不满秩的构型矩阵后,剩余1008种合理构型。对于合理构型,通过发动机转速和输出轴转速可以分别求得两个电机的转速,为

根据不同的设计目标,可以对构型矩阵再做进一步的筛选。本文中考虑到输出型功率分流系统的低速动力性较差,将输出型功率分流系统排除,这样剩余的构型就有660种。
二、最大输出转矩的系统解法
为了能够从上述的各种构型中找出加速性能最优的构型,需要找到一种系统的解法,计算出各种构型在不同车速、不同发动机转速下能够输出的最大转矩。
使用杠杆法进行受力分析,设转矩向上为正、向下为负。当电机转矩方向与转速相同时为驱动状态, 转矩方向与转速相反时为发电状态;当发动机转矩方向与转速相同时处于工作状态,发动机不存在转矩方向与转速相反的情况;系统驱动时,输出端的转矩反作用于杠杆,因此转矩方向和转速方向相反。
2.1 复合型功率分流系统
对于复合型功率分流系统作出杠杆图,分析其特征。将输出端放在杠杆的左半边,令T1、T2、T3、T4所在位置的坐标分别为x1、x2、x3、x4,且有x = 0 < x2 < x3 < x4。根据构型矩阵,可以得到 T1、T2、T3、T4 分别对应的动力源,也可以计算得到x2、x3、x4。
根据其输出端对应杠杆的位置,分为两类,如图3所示。A类:输出端在杠杆端点;B类:输出端不在杠杆端点。
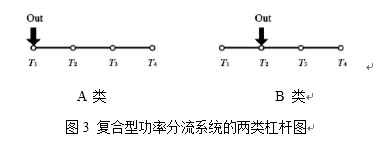
2.1.1 A类复合型功率分流系统
已知T1 < 0,由式(8)可知,T2、T3、T4中至少有一个为正;且T2 +T3+ T4 越大,T1越小,即|T1|越大。已知0 < x2 - x1< x3 - x1 < x4 - x1, 由式(9) 可知,T2、T3、T4中至少有一个为负;且当T2为正、T4为负时,可令T2 + T3 + T4 达到最大。
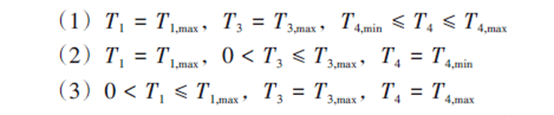
在任意车速、任意发动机转速下,当系统输出转矩最大时,有以下3种可能的转矩分配方式:

分别将以上3种转矩分配方式中的两个最值代入式(9),求得第三个值,验证其是否在指定范围内,即可确认能够得到T1,min时,各动力源转矩的分配方式。
2.1.2 B类复合型功率分流系统
已知 T2 < 0,由式(8)可知,T1、T3、T4 中至少有一个为正;且 T1 + T3+ T4 越大,T2越小,即|T2|越大。已知x1 - x2< 0 < x3 - x2 < x4 - x2,由式(10)可知,T3 和T4 至少有一个和T1 符号相同;且当T1 和T3 都为正时,可令T1 + T3 + T4 达到最大。
在任意车速、任意发动机转速下,当系统输出转矩最大时,有以下3 种可能的转矩分配方式:
分别将以上 3 种转矩分配方式中的两个最值代入式(10),求得第三个值,验证其是否在指定范围内,即可确认能够得到 T2,min时,各动力源转矩的分配方式。
对于B 类复合型功率分流系统,由于可以实现3 个动力源同时输出正转矩(第3、第 4 种分配方式), 在使用相同发动机和电机的情况下,可以输出比A 类系统更大的驱动转矩。从传动效率的角度来看, 由于B 类复合型功率分流系统具有两个机械点,因此较A 类系统也更具优势。
2.2 输入型功率分流系统
输入型功率分流系统具有一个明显特征:有一个电机的转速与输出轴转速不解耦,即直接参与驱动,该电机为驱动电机(TM),另一个电机为起动电机(ISG)。构型矩阵中有两个0的一列里,元素不为0 的电机是驱动电机,元素为0 的电机是起动电机。
对输入型功率分流系统作出杠杆图,令T1 对应输出端、T2 对应驱动电机、T3 和T4 分别任意对应发动机和起动电机,如图4 所示。实心圆点代表未连接任何动力源,且不可转动的节点;空心圆点代表与动力源连接,且可随动力源转动的节点。以不与任何动力源 连接的节点为原点,根据构型矩阵可以计算得到T1、T2、T3、T4 所在位置的坐标x1、x2、x3、x4。

图4 输入型功率分流系统的两类杠杆图
根据其输出端对应杠杆的位置,分为两类:A 类:输出端在两个行星排相连处;B 类:输出端不在两个行星排相连处。
为了达到系统最大的输出转矩,驱动电机应当输出最大的驱动转矩;而发动机和起动电机应至少有一个达到当前转速下的最大转矩。
对于任意构型,在任意车速、任意发动机转速下,当系统输出转矩最大时,有以下8种可能的转矩分配方式:
2.2.1 A类输入型功率分流系统
稳态条件下,有力学平衡公式

已知T1 < 0, 由式(13)可知,为使| T1|最大,(T2+ T3 + T4) x2/x1应尽可能地大;当x2/x1 > 0 时,T2 +T3 + T4应为正,反之应为负。由式(14)可知,当x4 - x2/x3- x2 > 0时,T3与T4符号相反,反之符号相同。
分别将T3,max 和T3,min 代入式(14),验证T4 是否在允许范围内;将T4,max 和T4,min 代入式(14),验证T3是否在允许范围内。将符合条件的组合代入式(13),并分别代入T2,max和T2,min,取所有组合求得的T1,min。
2.3 输出型功率分流系统
与输入型功率分流系统不同,输出型功率分流系统的驱动电机转速与输出轴转速解耦,但起动电机与发动机的转速不解耦。构型矩阵中有两个0的一列里,元素不为0 的电机是起动电机,元素为0 的电机是驱动电机。
对输出型功率分流系统作出杠杆图,令 T1 对应输出端、T2 对应驱动电机、T3 和 T4 分别任意对应发动机和起动电机,且规定T3 位于两个行星排相连处,如图5 所示。以不与任何动力源连接的节点为原点, 根据构型矩阵可以计算得到T1、T2、T3、T4 所在位置的坐标x1、x2、x3、x4。

图5 输出型功率分流系统的杠杆图示例
稳态条件下,有力学平衡公式
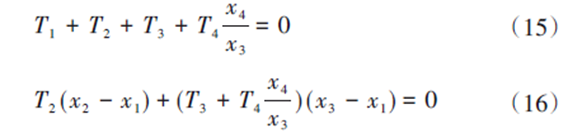
在任意车速、任意发动机转速下,当系统输出当系统输出转矩最大时,有以下6种可能的转矩分配方式:
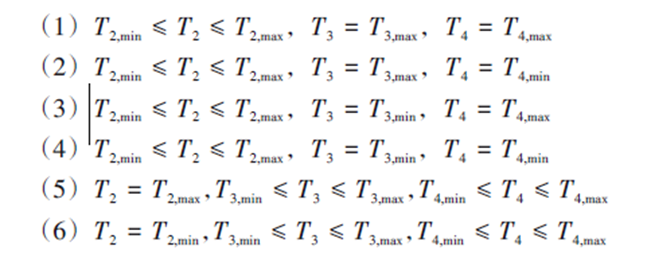
分别将第 1~4 种分配方式中 T3 和 T4 的最值代入式(16),求得T2 并验证其是否在允许范围内。将第5 和第 6 种分配方式中的 T2 的最值代入式(16),验证T3和 T4在允许范围内是否有解,此时可能存在非唯一解。将以上符合条件的组合代入式(15),取所有组合求得的T1,min。



 广告
广告 



最新资讯
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
