




 广告
广告





















































面向多工况性能匹配的汽车悬架衬套多因素联合优化

摘要:汽车多体动力学分析时,麦弗逊悬架通常采用刚体建模,无法表现出传力过程中控制臂受力变形较大的特点,因此仿真结果与实际运动情况偏差较大。基于Adams/Car系统建立麦弗逊悬架刚柔耦合模型,利用试验和有限元仿真结合的方法得到悬架橡胶衬套本构模型以及刚度数据,提高了模型精度。通过悬架运动学特性分析中的同向轮跳试验仿真,分析车轮定位参数的变化、抗制动点头率及顺从转向特性参数等悬架有关的性能指标,将所得评价指标结果与有关标准规范值及有关权威文献的结论进行对比,发现车轮前束角和主销后倾角变化超出合理范围,抗制动点头率和顺从转向值变化处于合理范围,但仍有优化空间。鉴于设计后期整车基本参数已经确定及悬架橡胶衬套刚度和安装角度对悬架性能影响较大的特点,联合Adams/Car和Isight进行灵敏度分析;以车轮定位参数、抗制动点头率、顺从转向值为优化目标,以灵敏度较高的悬架橡胶衬套参数为优化变量,选择第2代非支配排序多目标优化遗传算法(NSGA-Ⅱ)为优化算法,进行多因素联合优化;优化后车轮定位参数变化范围、顺从转向值减小,抗制动点头率提高。结果表明,下控制臂前后衬套刚度和安装角度对悬架性能影响明显,经过优化,悬架性能得到改善。
悬架是车轮与车架之间的主要传力装置,起到缓解路面冲击和振动作用,其性能优劣直接决定整车的操稳性和平顺性。在传统的悬架运动学分析中,通常把悬架设置成刚体结构,忽视了结构变形对悬架运动特性的影响,导致仿真精度较低,与悬架实际运动有一定的偏差。采用刚柔耦合建模方式可以有效解决上述问题,考虑结构变形对悬架运动的影响,有效提高了仿真精度。
本文以国产某车麦弗逊悬架为研究对象,通过试验和仿真结合的方法得到悬架橡胶衬套刚度数据,建立麦弗逊悬架刚柔耦合模型,将悬架下控制臂建成柔性体模型,同时匹配转向系统、轮胎系统,建立完整悬架模型。针对此悬架整体性能较差的特点,对悬架橡胶衬套刚度和安装角度进行优化分析,改善悬架性能。
1、麦弗逊悬架模型
1.1 麦弗逊悬架三维模型
麦弗逊悬架是现代轿车常采用的悬架形式,其三维模型如图1所示,拓扑结构如图2所示,麦弗逊悬架的各连接关系根据实际模型定义。
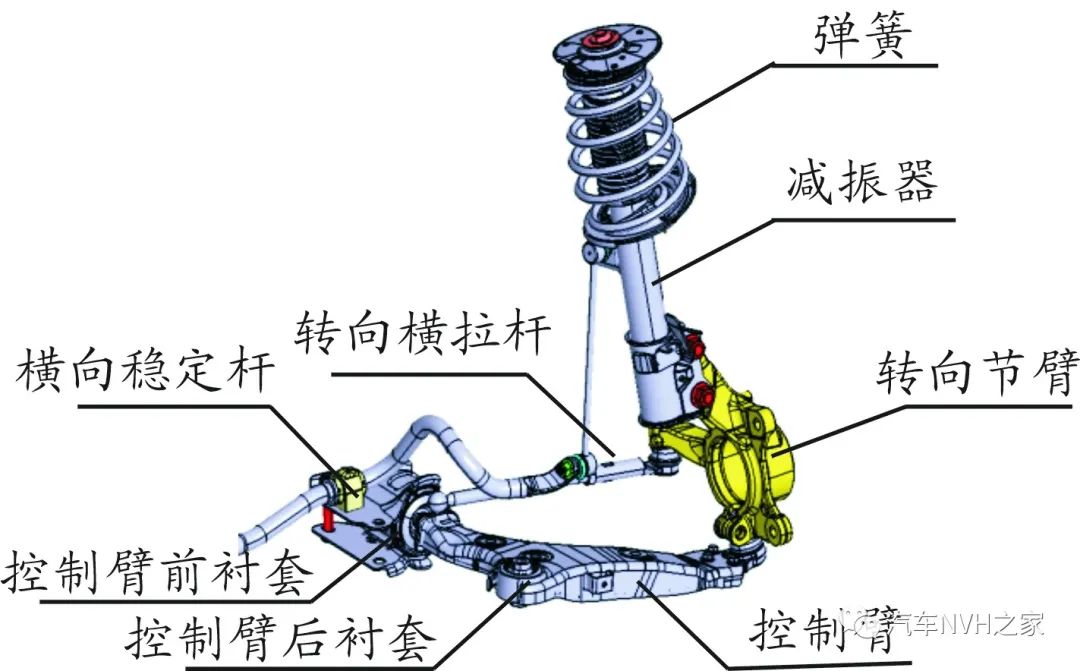
图1 麦弗逊悬架三维模型
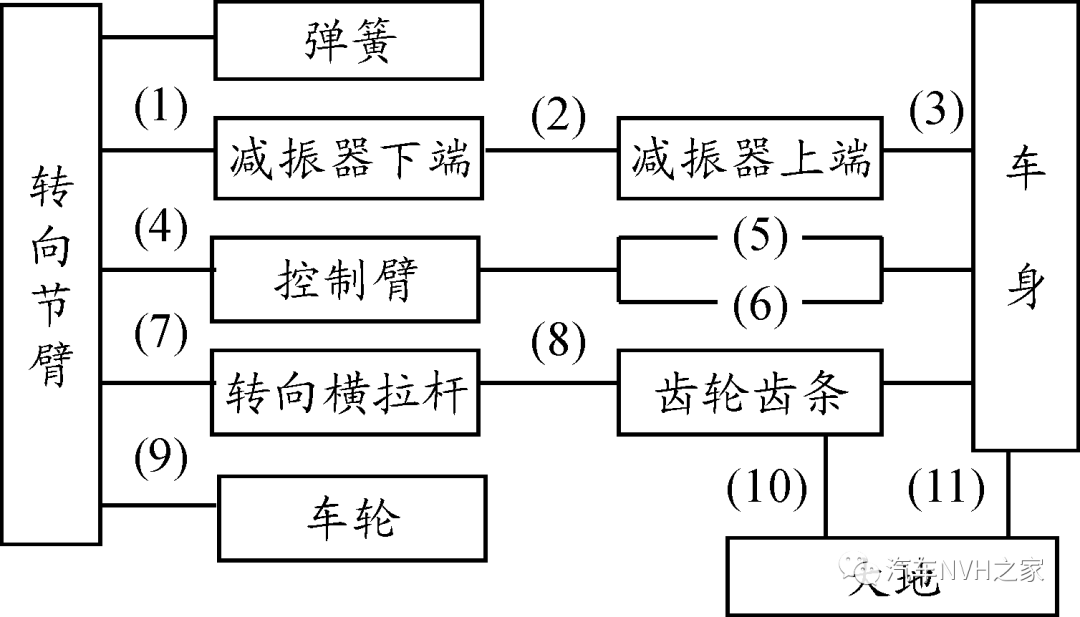
(1)(11)-固定铰;(2)(10)-移动副;(3)-万向副;
(5)(6)-衬套连接;(4)(7)(8)-球铰;(9)-转动副
图2 麦弗逊悬架拓扑图
在建立麦弗逊悬架多体动力学模型时,各部件的质量参数、转动惯量参数通过三维模型获得,其弹簧、减振器以及衬套参数根据相关实验数据获得。悬架关键硬点坐标如表1所示。
表1 麦弗逊悬架关键硬点(左侧)坐标

1.2 橡胶衬套力学特性研究
麦弗逊悬架中,弹簧、减振器和悬架橡胶衬套是主要受力元件,悬架橡胶衬套受力情况比较复杂,对悬架性能影响较大,本文通过试验和仿真结合的方法研究悬架橡胶衬套静态特性。
对于本构模型的选择,目前常采用的是Yeoh本构模型、Arruda-Boyce本构模型、Ogden本构模型3种形式。本文通过试验对比的方式确定合理的本构模型。
1) Yeoh本构模型
对连续介质力学进行处理时,一般假设其为各向同性的超弹性材料,这样,其应变函数表示为:

(1)式中:I1,I2分别为一阶、二阶应变不变量,偏伸长率
其中,λi为主伸长率,J为总体积比)。一般取I3=1。则现阶段应变能表达式为:
(2)式中,Cij、Di代表材料的恒定数值,Jel为弹性体积比,N为多项式阶数。
2) Arruda-Boyce本构模型
Arruda-Boyce形式应变能采用如下定义:
(3) 3) Ogden本构模型
Ogden本构模型以3个主伸长率为变量,表达式为:

(4)式中:
为主伸长率,J为总体积比。
通过单轴拉伸试验、双轴拉伸试验和平面剪切试验进行拟合(如图3所示),拟合结果表明,Yeoh模型的拟合程度更高,因此本文选择Yeoh模型作为悬架橡胶衬套本构模型。
建立悬架橡胶衬套有限元模型,以控制臂前衬套为例进行分析,采用六面体单元(C3D8H)对橡胶衬套进行有限元网格划分,衬套中心孔处的内刚性圈使用二维的Shell4单元来模拟,由于橡胶衬套与内刚性圈采用硫化技术结合在一起,采用橡胶衬套与内刚性圈公用节点的方式模拟硫化技术。橡胶衬套与外刚性圈采用过盈配合装配,对橡胶衬套外表面上节点施加强迫位移来模拟过盈配合。如图4所示,就是控制臂前衬套三维模型与有限元分析过程,控制臂前衬套Z方向沿整车X方向放置。
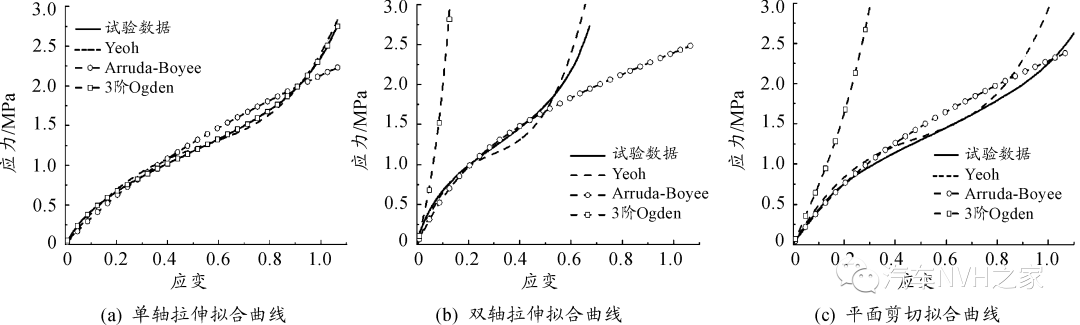
图3 橡胶衬套材料试验拟合曲线
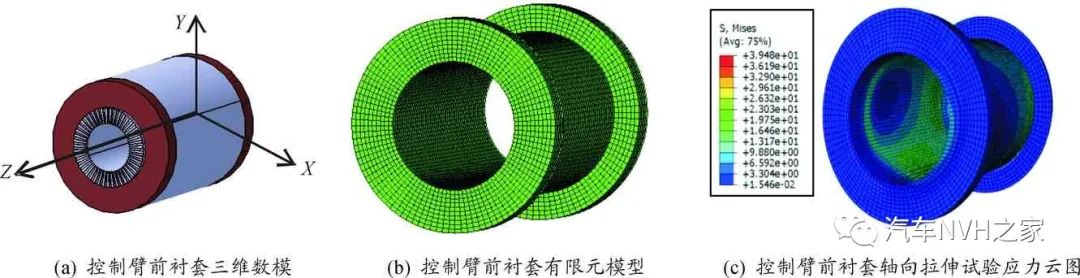
图4 控制臂前衬套三维模型与有限元分析
由于受试验条件的限制,对悬架橡胶衬套进行轴向和径向拉伸试验,对比有限元分析中的轴向、径向拉伸试验数据,确定有限元模型的可行性。通过ABAQUS软件进行悬架橡胶衬套刚度试验,得到悬架橡胶衬套刚度数据[4],图5是万能材料试验机加载装置。图6是轴向、径向拉伸试验和仿真结果对比图。
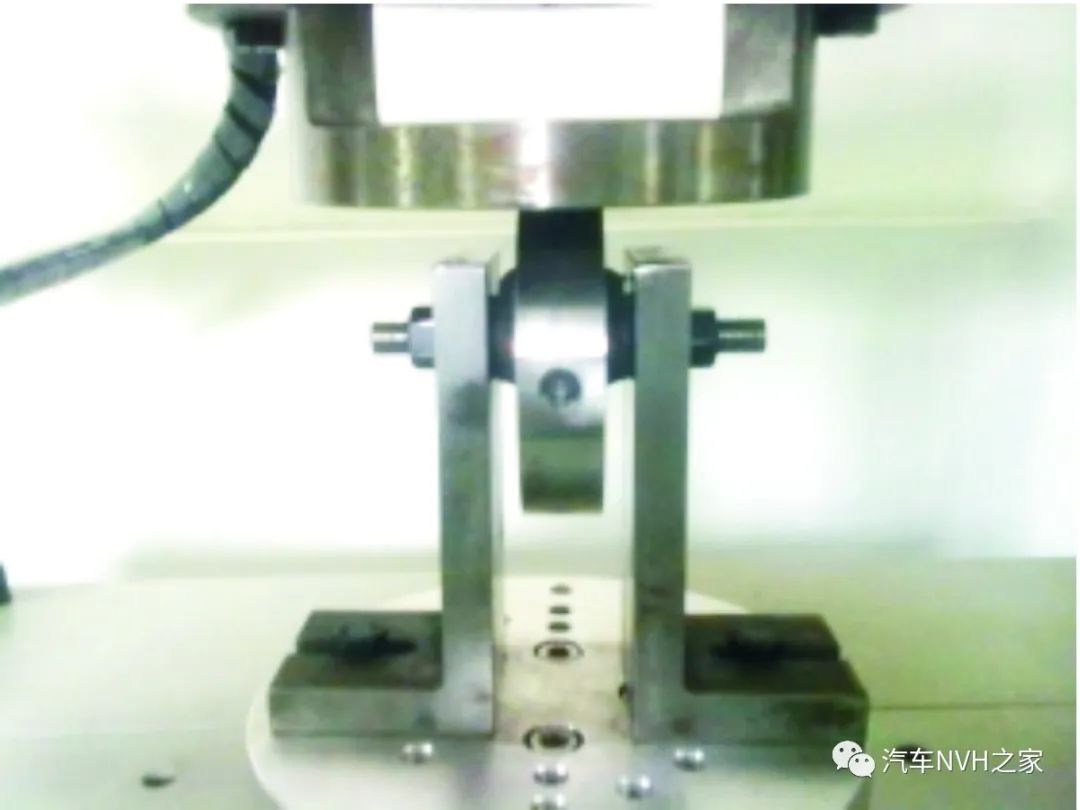
图5 橡胶衬套材料试验机
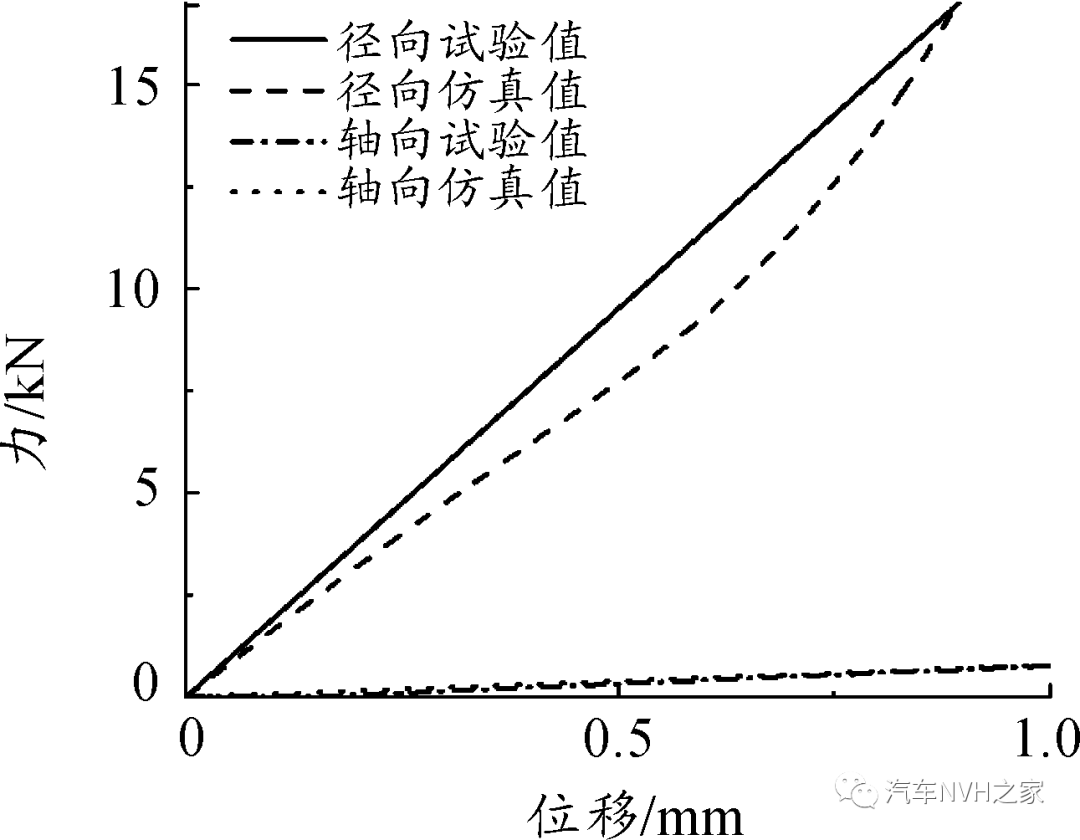
图6 控制臂前衬套试验仿真对比
2、麦弗逊悬架多体动力学模型
麦弗逊悬架是一个较复杂的系统,其结构左右对称。车辆在运行过程中,作用在车轮上的力和力矩通过控制臂、转向节、减振器等部件传递到车身,引起车身的振动。在传力过程中,控制臂受力和结构变形较大,导致车轮定位参数变化,影响整车操纵稳定性。因此,本文将下控制臂做成柔性体,对悬架进行刚柔耦合分析,提高仿真精度。
2.1 控制臂有限元模型的建立
建立控制臂柔性体模型,将三维模型导入hypermesh中,划分SHELL单元,最终得到SHELL单元共有23 247个,节点共有23 744个,定义单元属性和截面厚度,导出pdf文件。将文件输入MotionView中,进行模态分析,最终导出mnf文件,供Adams/Car分析使用。控制臂有限元模型如图7所示。
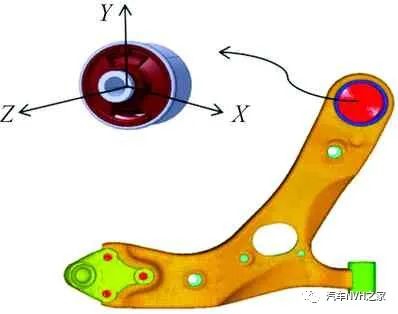
图7 控制臂有限元模型
2.2 麦弗逊悬架刚柔耦合模型
麦弗逊悬架模型包括悬架系统、转向系统和车轮系统3部分。悬架系统主要包括控制臂、转向节、弹簧减震器等部件。转向系统建模时,首先测量三维模型中的硬点,然后修改模板中的硬点坐标。轮胎直接与地面接触,是整车受力的核心系统,其模型的精度直接影响悬架仿真精度,本文选择UA模型作为轮胎模型。把2.1中生成的控制臂MNF文件导入Adams/Car中,由三维模型可知,控制臂一端通过球铰与转向节连接,另一端通过衬套与副车架连接,Adams/Car中通过Interface Part实现刚体与柔性体的连接。组装悬架系统、转向系统和轮胎系统,构成麦弗逊悬架刚柔耦合模型。具体模型如图8所示。
3、悬架运动学分析
在悬架运动学分析中,通过车轮定位参数、抗制动点头率、顺从转向特性等分析麦弗逊悬架性能。设置车轮上下跳动范围-50~50 mm,仿真步长100。
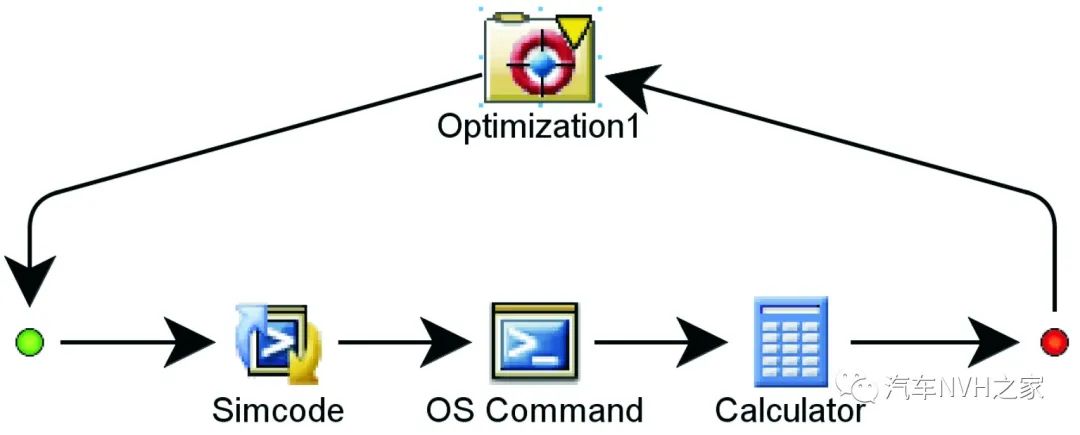
图8 麦弗逊悬架刚柔耦合模型
3.1 车轮定位参数仿真分析
1) 前轮外倾角
前轮外倾角是指车轮平面相对于路面向外倾斜一定角度,对车辆操纵稳定性影响较大。车轮跳动过程中希望前轮外倾角变化尽可能小,在上跳过程中,外倾角会向负方向变化,下落过程中,会向正方向发生变化。通常在车轮同向跳动激励仿真中,车轮上跳时外倾角变化设置在1°以内。由图9可以看出,前轮外倾角变化范围在0.35~0.78°,处于合理区间。
2) 前轮前束
车辆运行过程中,前轮前束保证车轮直线行驶稳定性,并且保证有不足转向性能。因此,在车轮上下跳动中,希望车轮前束变化范围尽可能小,这样可以减小车轮滚动阻力,降低对轮胎的摩擦。通常在车轮上跳时,应尽量减小前束角变化范围。由图10可知,前轮前束角变化范围在-0.982 5~0.802 1°,该悬架前束角变化范围较大,需要改进。
3) 主销后倾角
一定的主销后倾角可使车轮产生回正力矩,增加驾驶员路感,车辆在不平路面上行驶时,会使车轮自动回正,增加车辆的行驶稳定性。但是过大的主销后倾角会使转向沉重,不利于驾驶。在车轮上下跳动过程中,一般希望主销后倾角在合理范围内变化,避免因载重不同导致车轮的回正力矩有较大变化,影响整车操稳性。因此一般希望车轮上跳时,悬架每压缩10°,后倾角变化范围0.1~0.4°。由图11可知,主销后倾角变化0.18°,处于合理范围内。
4) 主销内倾角
合理的主销内倾角使前轮转向更轻便,但是过大的主销内倾角会导致轮胎磨损严重,不利于转向。在车轮上下跳动过程中,一般要求主销内倾角在7~13°变化,由图12可知,悬架主销内倾角变化稍超出范围。
3.2 抗制动点头率
车辆在减速时,会发生车轮载荷转移现象,导致麦弗逊悬架弹簧拉伸或压缩。抗制动点头率的大小表征了悬架抵抗载荷转移的能力。对于乘用车,抗制动点头率一般取50%~70%,如图13所示,悬架抗制动点头率符合设计要求。
3.3 顺从转向特性分析
车轮受到侧向力时,会出现顺从转向,对车辆操稳性有一定影响,一般希望顺从转向值比较小。如图14所示,悬架顺从转向最大值为3.071 4×10-4 mm,考虑整车操稳性,希望减小顺从转向值。
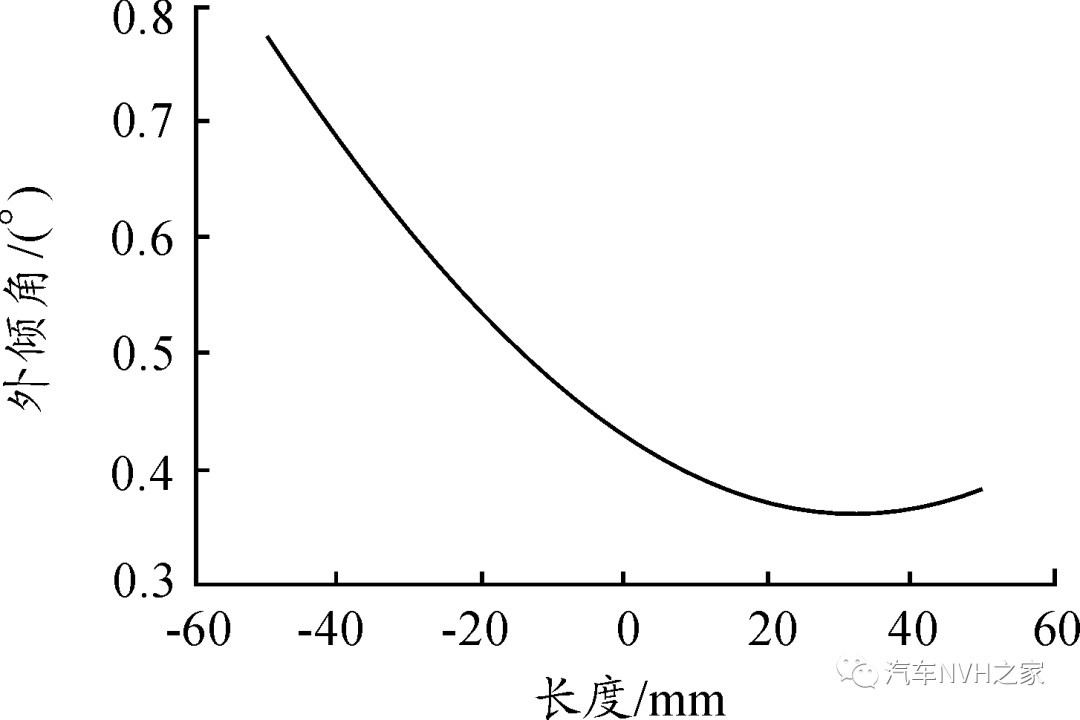
图9 车轮外倾角变化曲线
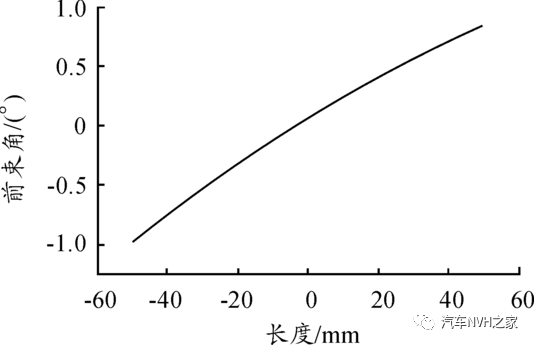
图10 车轮前束变化曲线
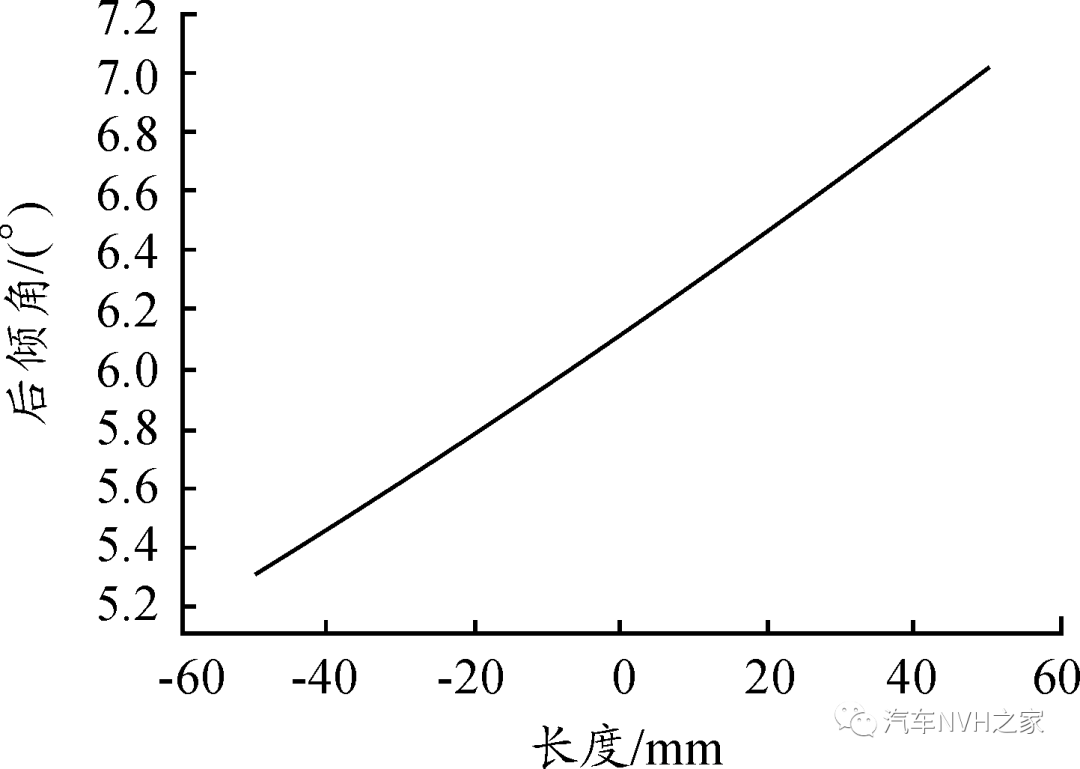
图11 主销后倾角变化曲线
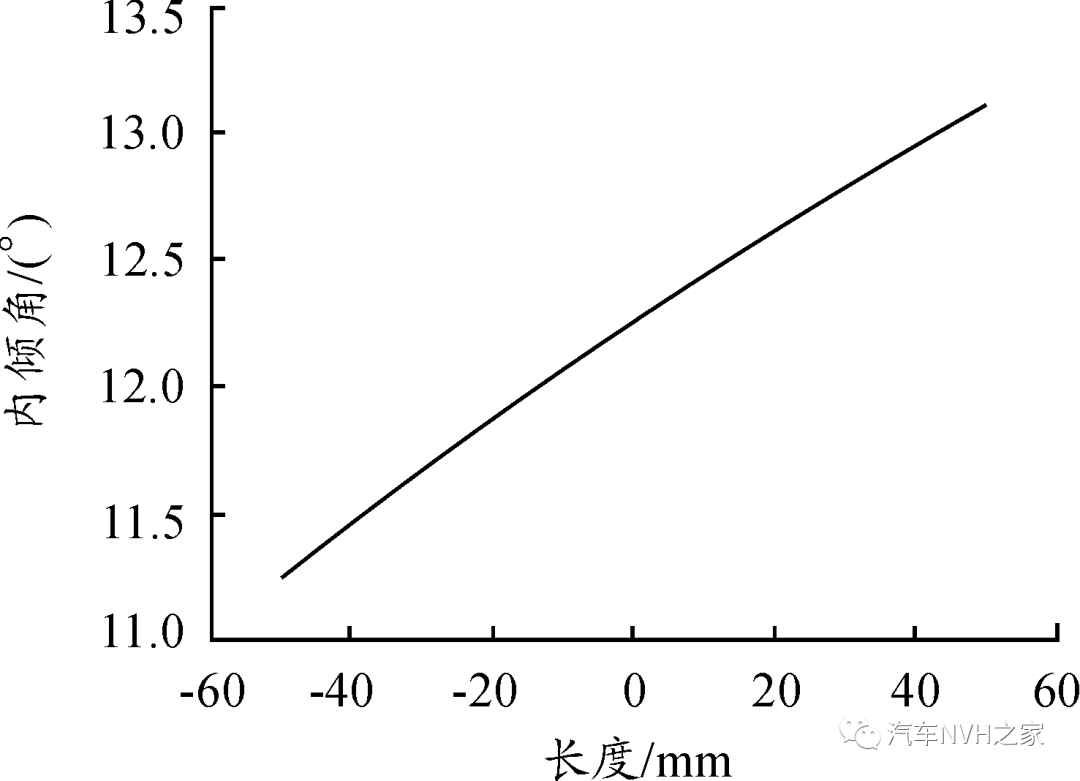
图12 主销内倾角变化曲线
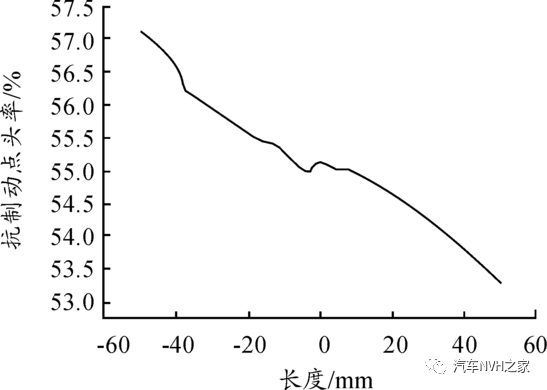
图13 抗制动点头率
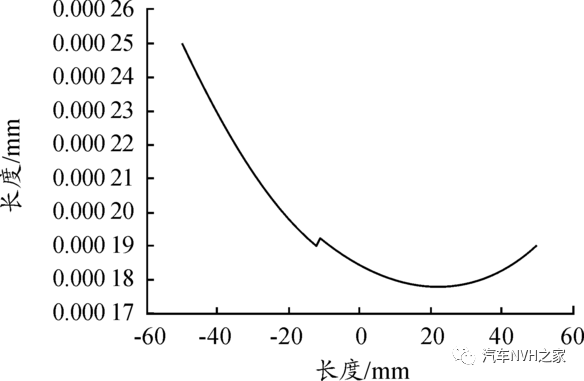
图14 顺从转向特性分析
4、悬架橡胶衬套优化
4.1 优化算法
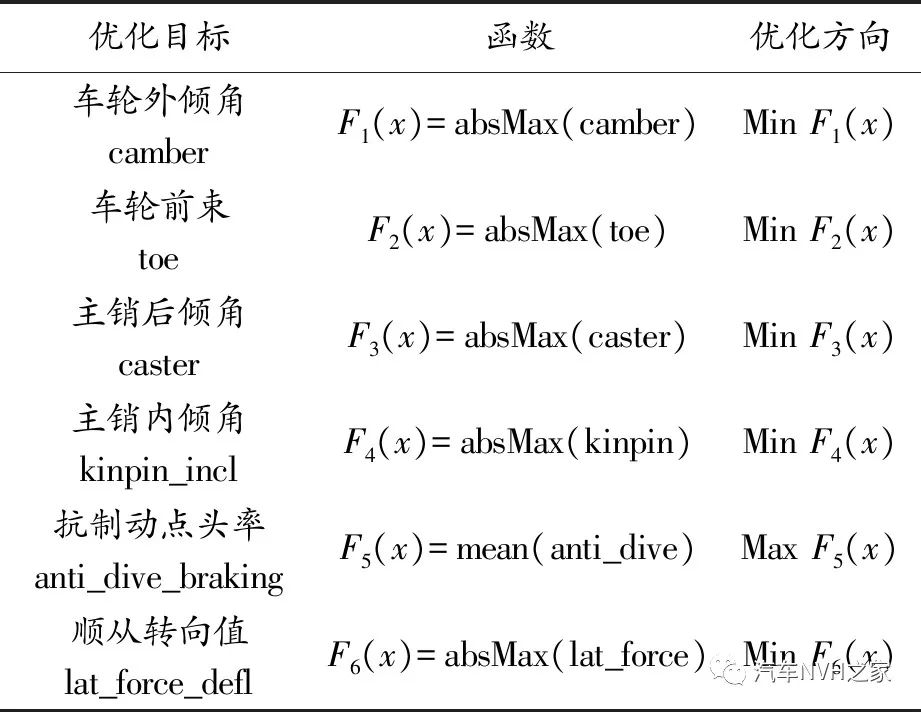
通过优化悬架橡胶衬套安装角度和刚度,使悬架性能最优。悬架橡胶衬套角度和刚度与悬架性能的关系并不是一对一、线性的关系,而是相互耦合的关系。因此,在优化过程中,要对各目标函数进行归一化处理,再分配权重。各目标的优化方向如表2所示。优化流程如图15所示,其中,Simcode调用Adams/Car进行悬架同向轮跳仿真,OS Command调用函数删除仿真过程中产生的过程文件,为下一次仿真做准备,Calculator计算目标函数,Optimization按照各目标的优化方向计算最优解。
图15 Isight优化流程
表2 各目标的优化方向
为了达到优化目标,本文选择NSGA-Ⅱ作为优化函数。NSGA-Ⅱ是改进的遗传算法,对多目标优化问题实现效果较好。NSGA-Ⅱ可以提高遗传算法的收敛速度,解决了共享参数选择困难的问题,采用精英策略,使新一代种群比前一代更接近最优解,如图16所示是NSGA-Ⅱ算法流程。通过NSGA-Ⅱ算法可以得到Pareto解集,使用模糊隶属度函数得到最优解。如式(5)所示,就是计算Pareto解集中第k个解对第i个目标函数的隶属度。
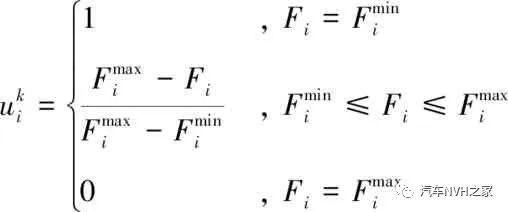
(5)式中:Fi为目标函数i的值,
为目标函数的上下限值。设置目标函数的权重值,本文设置等权重,公式如式(6)所示。
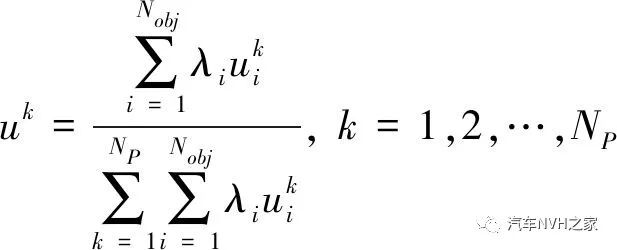
(6)式中:NP为种群数目;λi为目标函数i的权重;Nobj为目标函数个数;

为隶属度函数值。
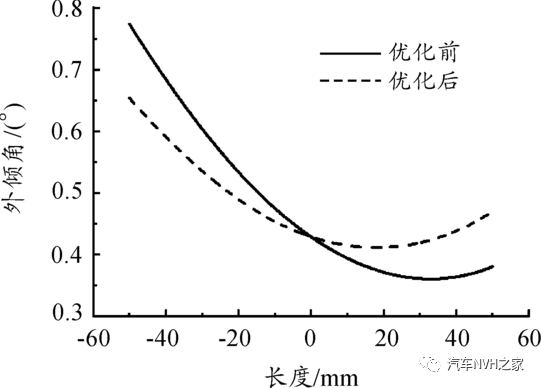
图16 NSGA-Ⅱ算法流程
4.2 灵敏度分析与优化变量选择
为了提高优化效率,快速找到对优化目标影响较大的设计变量,在优化试验前进行灵敏度分析。通过对设计变量施加一定的扰动,观察优化目标的变化情况。本文通过Isight进行灵敏度分析,对悬架橡胶衬套刚度比例因子施加[1/5,5]的扰动,对悬架橡胶衬套安装角度施加[-π/2,π/2]的扰动,找出对优化目标影响较大的悬架衬套刚度和安装角度。图17是各设计变量对车轮外倾角灵敏度分析的结果。最终选择优化变量为:减振器上衬套Z轴拉伸刚度(strut_up_fx)、X轴扭转刚度(strut_up_tx),控制臂前衬套Y轴扭转刚度(lca_front_ty)、Z轴扭转刚度(lca_front_tz),控制臂后衬套X轴拉伸刚度(lca_rear_fx)、X轴扭转刚度(lca_rear_tx),控制臂前衬套安装角度(front_angle_z)、后衬套安装角度(rear_angle_y)。
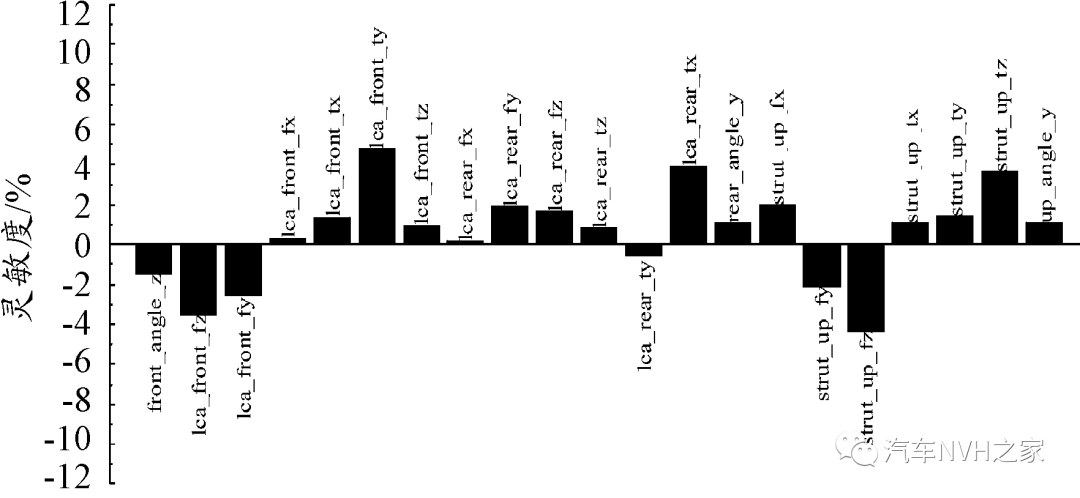
图17 各设计变量对车轮外倾角灵敏度分析结果
4.3 优化结果
综合灵敏度分析结果,通过Adams/Car与Isight联合仿真进行优化分析。NSGA-Ⅱ优化算法具体参数设置为:种群规模502,迭代次数50,交叉概率0.9。选择车轮定位角、抗制动点头率和顺从转向值为性能指标。
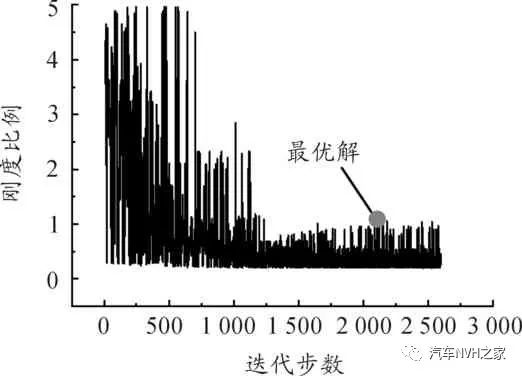
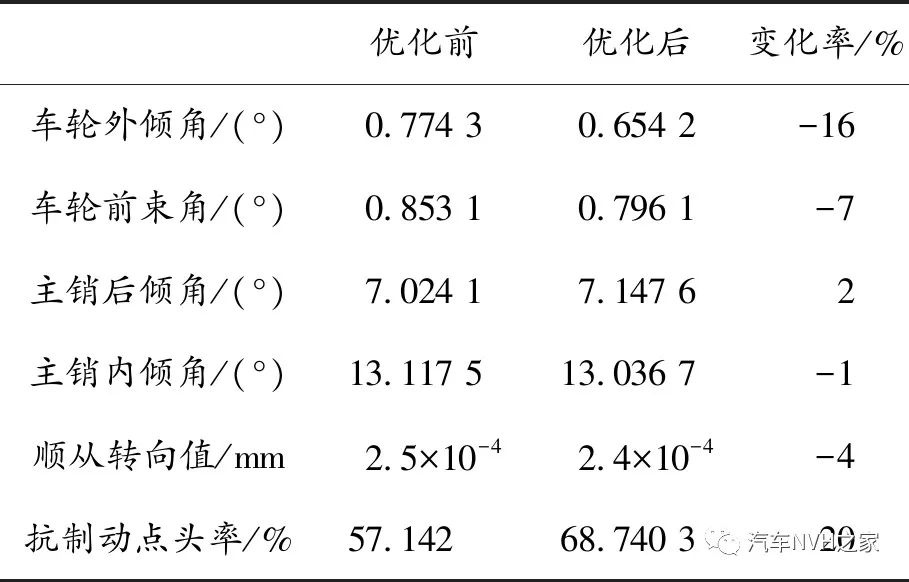
图18为优化后的车轮外倾角与前束角Pareto解集,2个优化目标之间相互矛盾,兼顾2个目标,使用模糊隶属度函数得到最优解,最优解已在图中标出;图19是优化过程中的减振器上衬套Z向拉伸刚度比例因子变化规律曲线,由图可看出,随着迭代步数的增加,衬套Z向拉伸刚度比例因子出现逐渐收敛到0的趋势。优化后各性能指标均向理想方向变化,把优化后的各参数带入Adams/Car验证,证明结果有效,如图20~23所示,分别是车轮外倾角、车轮前束角、抗制动点头率和顺从转向特性优化前后对比。优化后各变量刚度比例和安装角度变化如表3所示,优化前悬架橡胶刚度比例为1,原始安装角度记为0°,角度的变化规定逆时针为正、顺时针为负;各性能指标的前后变化情况及变化率如表4所示。
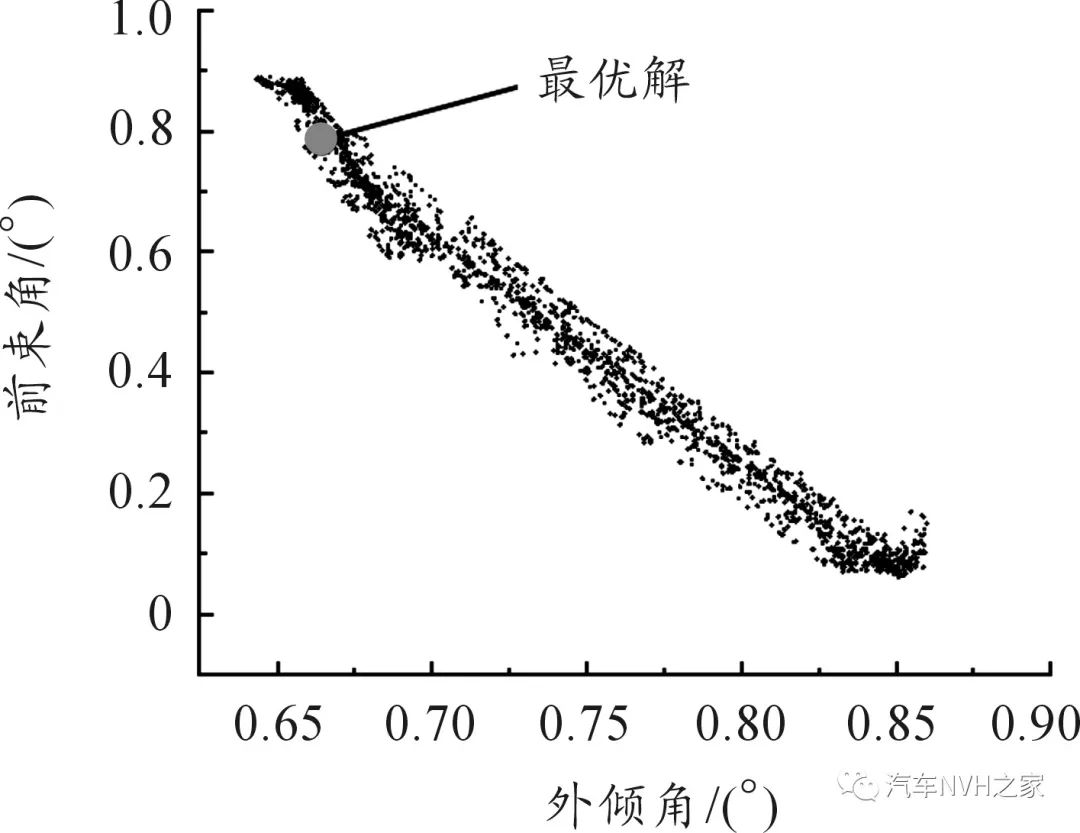
图18 Pareto解集
图19 减振器上衬套扭转刚度变化
图20 车轮外倾角优化前后对比
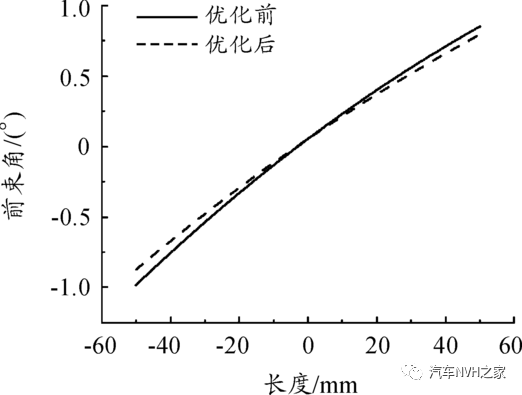
图21 车轮前束角优化前后对比
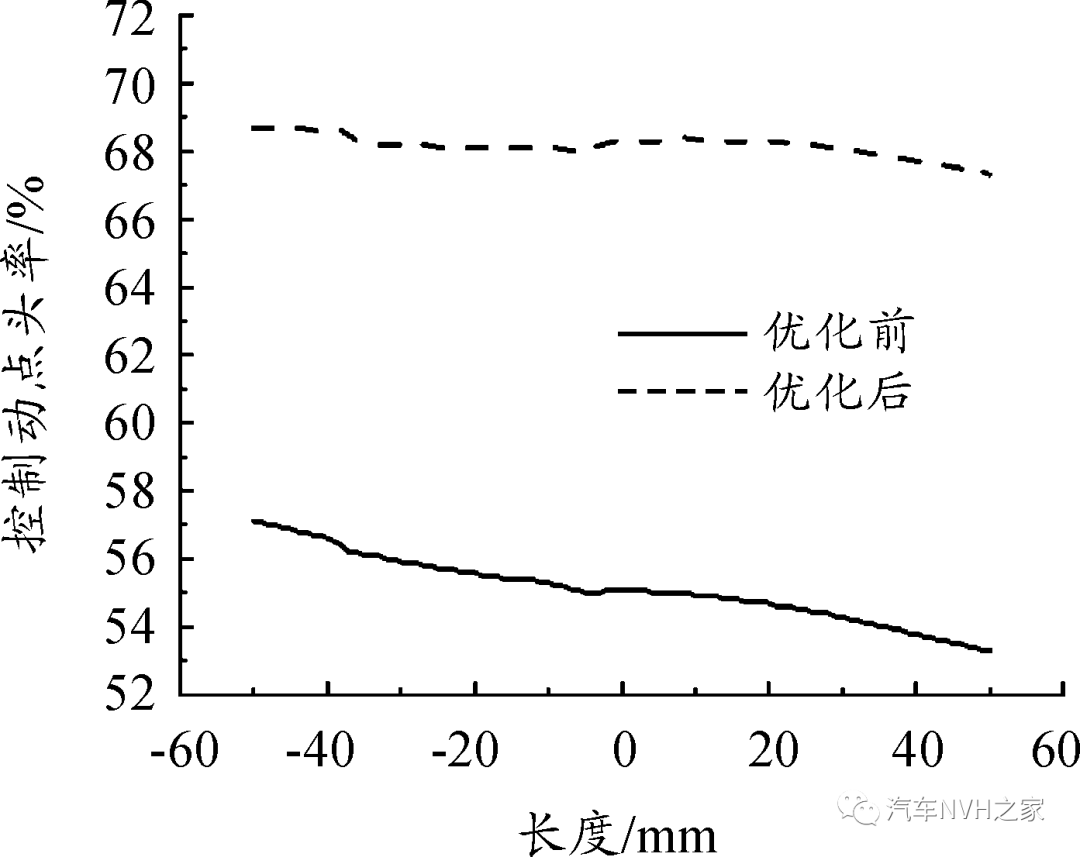
图22 抗制动点头率优化前后对比
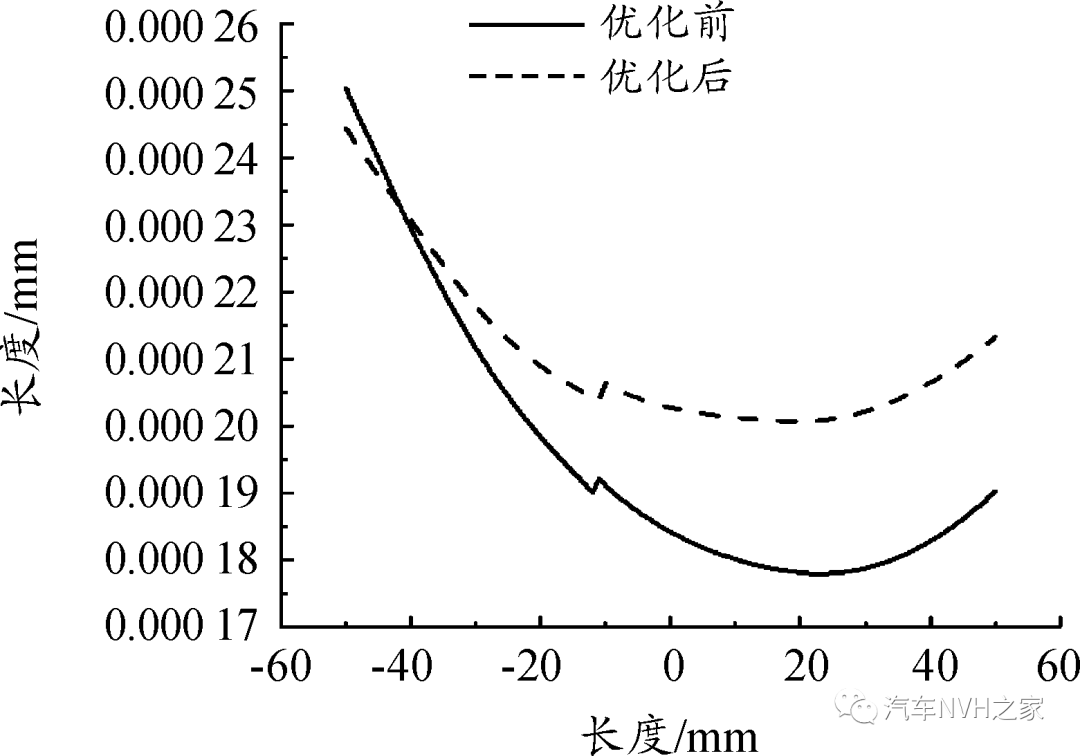
图23顺从转向特性优化前后对比
表3 优化前后各参数变化

表4 优化前后各性能指标的变化率
5、结束语
1) 为了使悬架模型在仿真中与实车更接近,通过试验和仿真结合的方法获得麦弗逊悬架3个关键位置橡胶衬套刚度数据;采用刚柔耦合方式建立麦弗逊悬架多体动力学模型,提高仿真精度。
2) 通过改变悬架橡胶衬套刚度和安装角度,优化悬架性能。通过优化发现,控制臂前衬套绕Z轴扭转刚度和控制臂后衬套绕X轴偏摆刚度对悬架性能影响较大,刚度系数分别变为4.946倍和4.690 5倍,同时改变控制臂后悬架橡胶衬套的安装角度,绕Z轴按逆时针旋转35°。优化结果证明,本文优化方法有效,除主销后倾角与设置变化方向不一致(但在允许范围内变化),其他各优化目标均向设置方向变化,抗制动点头率变化最大,达到了20%,说明优化结果较好。



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
