




 广告
广告





















































关于动力总成悬置系统模态能量表达的一个注记

[摘要] 本文中对能量分布矩阵的两种表达方式进行了讨论。首先介绍了6自由度系统振动方程与能量法解耦的基本概念,给出了基于自由度的6x6能量分布矩阵各元素的计算式。接着在概述应用ADAMS软件进行动力总成悬置系统固有特性分析的基本过程后,推演了其中采用的6x9能量分布矩阵及其元素的计算式。然后依据动力学概念,阐述了两种能量分布矩阵各自的特点及其相互关系。最后以某款汽车的动力总成悬置系统为例,依据原始定义或取分量绝对值分别计算得到了两种能量分布矩阵,对二者的关系进行了验证。
关键词:发动机悬置;振动解耦;能量分布矩阵;ADAMS
前言
汽车动力总成是汽车主要的振动和噪声源。动力总成悬置设计的好坏,直接影响着整车的NVH性能。有效的悬置设计,不但要求合理设定系统的各阶固有频率大小,而且也须尽可能解除振动耦合¨。9 J。对于依据刚体一弹性支承模型建立的6自由度动力总成悬置系统方程,可定义6x6阶模态能量分布矩阵¨。5 J。动力学仿真软件ADAMS因其直观性与强大的功能,正日益广泛地应用于悬置的优化与分析¨,8。9‘。它引入了6x9阶能量分布矩阵,并给出各分量的简单计算式。迄今,尚未见文献明确阐述两种能量表示方式之间的关系。这不利于ADAMS软件在动力总成悬置设计中的推广应用。
本文中首先回顾了基于弹性支承空间刚体动力学建立的动力总成悬置系统方程,介绍了能量解耦方法及其所定义的能量分布矩阵。在应用ADAMS软件进行动力总成悬置系统自由振动分析的基础上,给出了其中所定义的能量分布矩阵元素的计算式。通过对比分析,阐述了两种能量分布矩阵之间的差异与关系。最后通过某款汽车的动力总成悬置系统对有关结果予以验证。
1 系统动力学方程及模态能量
1.1 系统动力学方程
动力总成隔振设计的基本理论是弹性支承空间刚体动力学。其中,将包括发动机、离合器和变速器在内的动力总成简化为刚体,悬置软垫简化为线弹性弹簧。图l为一个4点悬置支承的动力总成系统示意图。图中,坐标系z轴与曲轴中心线重合,正向指向发动机前端,z轴与气缸轴线平行、正向垂直向上,Y轴由右手法则确定。通常,固定坐标系G—XYZ和随体坐标系o-xyz原点均在质心处,静平衡状态下二者重合。
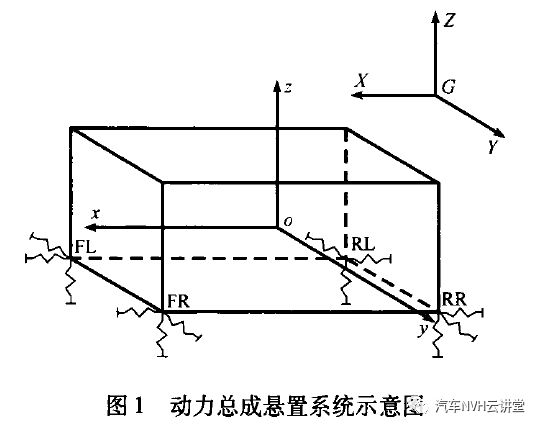
忽略悬置胶垫的阻尼,系统作自由振动的微分方程为
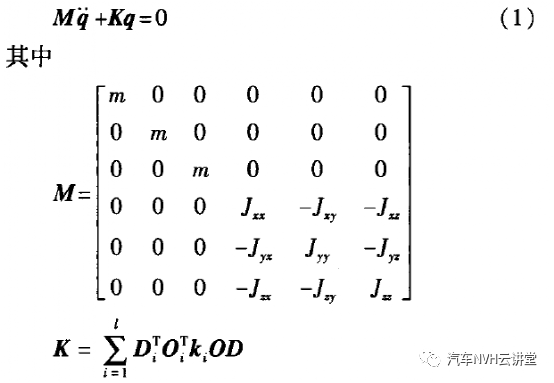
式中:M、K分别为质量矩阵与刚度矩阵;g为广义位移向量;z为悬置个数;七i为悬置i的3向刚度矩阵;D、O分别为悬置位置与安装角定义的变换矩阵。
1.2基于模态能量的振动解耦
从能量角度来看,振动耦合就是沿着某个广义坐标方向施加的力或力矩所做的功转化为系统在多个坐标方向的动能和势能。对于保守系统,机械能守恒。因此任一阶主振动的总能量可用最大动能或最大势能表示。
多自由度振动系统作第n阶主振动的最大动能为

式中:ωn。与Xn。分别为系统的固有圆频率与对应主振型向量。将式(2)展开,并定义第i个广义坐标上的动能曩曲及其在总能量中的百分比Pin分别为
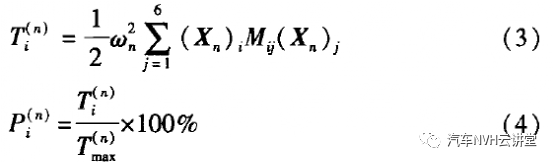
式中:
表示振型向量的第k个分量;Mij为质量矩阵中第i行J列的元素。

的大小表示能量集中程度,若其值为100%,则说明系统第n阶主振动的能量全部集中在第i个广义坐标方向,而其它广义坐标方向的振动为零,这就实现了振动解耦。工程实际中,由于布置空间和成本等方面的限制,难以在6个广义坐标方向都实现振动解耦(即完全解耦)。因此,现代汽车动力总成悬置设计通常采用部分解耦,特别是在激振能量大的方向上要保证解耦。
1.3模态能量分布矩阵
考察在任一主振动中各坐标方向上的能量分布。依据式(3)和质量矩阵的定义可知,3个平动坐标方向的能量为

3个转动坐标方向上的模态动能分别为
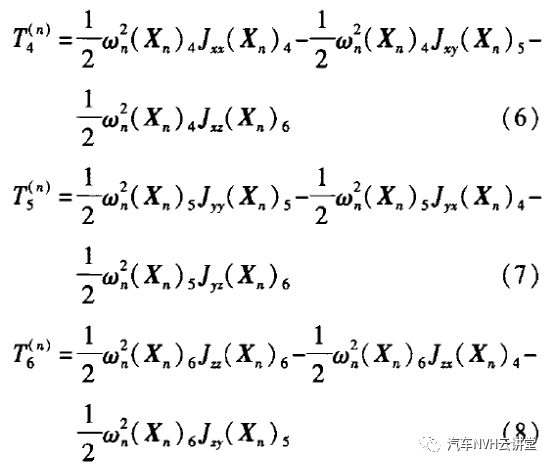
式(5)为系统第n阶主振动时沿石、Y和z方向的平动能量分量。式(6)一式(8)则分别表示系统转动能量分量,每项均包含绕坐标轴纯转动和绕平面转动两个部分。对式(1)所示6自由度动力总成悬置系统方程,分别对各阶主振动依据式(5)一式(8)计算,带入式(4)最终得到一个6x6阶模态能量分布矩阵,称为基于自由度的模态能量分布矩阵。
2 ADAMS建模过程及模态能量
将CAD软件建立的动力总成三维几何模型导入ADAMS/View后,输入动力总成的惯量参数和悬置软垫的弹性与阻尼参数,参数化后即可完成系统动力学建模。在ADAMS中,将系统分成若干子系统,分别计算各个子系统的能量,求和得到系统的总能量。设系统被分成k个子系统,第n阶主振动时系统总的模态能量可表达为

式中:

为第J个子系统总能量,其中任一子系统的模态能量又包含9个分量。以第j个子系统为例,其模态能量表达式为


为第e个分量,假设

为第n阶主振型中与子系统J对应坐标分量构成的向量。记子系统质量矩阵为卯,见式(1)中定义。为简便计,略去惯性参数的上标,则有
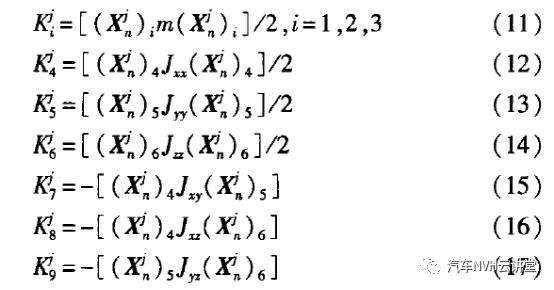
显然每个能量分量均表示对惯性张量某分量的贡献。其中:式(11)代表子系统质量的影响,对应沿广义坐标x,y和彳方向的平动能量;式(12)~式(14)代表子系统转动惯量的影响;式(15)一式(17)则代表子系统惯性积的影响;两组元素分别对应绕广义坐标戈、Y和z轴的一部分转动能量。依据式(9)和式(11)~式(17),子系统第e个能量分量在该阶主振动总能量中的百分比为

分别对6阶主振动进行计算即得到一个6x9阶矩阵,可称为基于惯性参数的能量分布矩阵。
3 两种能量表达式的对比
应用ADAMS软件进行动力总成悬置系统自由振动分析时,将发动机、变速器和离合器等视为一个刚体,通常不计人支架、车身等结构的影响。这样整个系统只有一个子系统,即j=1。
对比式(5)~式(8)与式(11)一式(17)可知
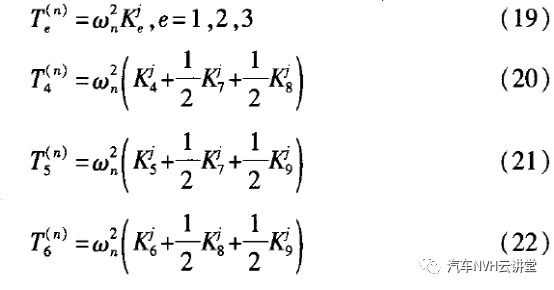
在以上各式中已应用惯性张量的对称性,即Jxy=Jyx,Jyz=Jzy,Jzx=Jxz。依据这组关系式可确定式(4)与式(18)所示能量百分比之间的对应关系。显然,式(5)~式(8)所定义的能量分量,因与自由度对应,故物理意义更为明确。另外,ADAMS软件在定义模态能量分量时,在保持平动能量分量不变的同时,将与转动相关的3个能量分拆成6个彼此更为简单而无交叉的分量,以分别描述转动惯量或惯性积对系统主振动能量的贡献。这样更易于反映系统各惯性参数的影响。
由式(19)一式(22)可知,式(9)和式(10)定义的总的模态能量(J=1)与式(2)完全一致。这是由模态能量的物理意义决定的。
不难理解,式(6)~式(8)或式(20)~式(22)给出的能量值及其百分比可能小于零。在工程应用中,为避免负值能量与模态动能概念之问的不协调,可取绝对值计算能量分量、能量和与能量百分比o7I。但这种处理后,分布矩阵元素均为正值,总能量会偏大,各元素值也异于不取绝对值得到的结果。
4 算例及分析
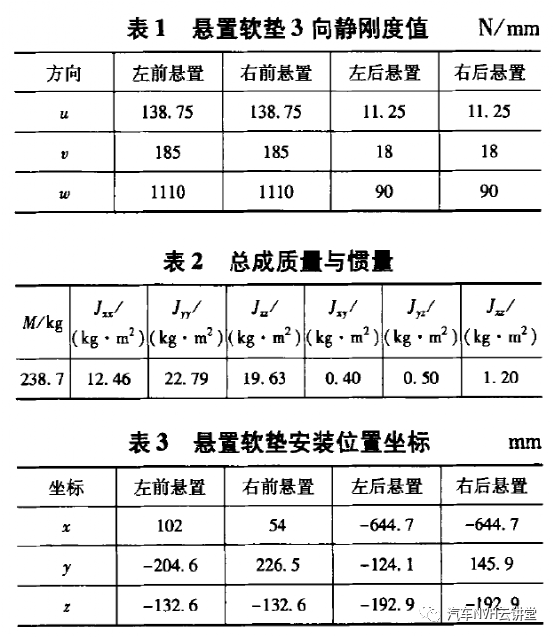
某款汽车的动力总成采用4点悬置,其基本参数见表1一表3。
基于式(1)在Matlab中直接编程,或应用ADAMS(2005版)仿真,可得系统的固有频率,见表4。
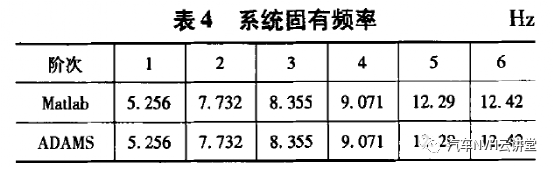
由表4可见,应用Maflab编程得到的频率与ADAMS仿真计算结果相同。
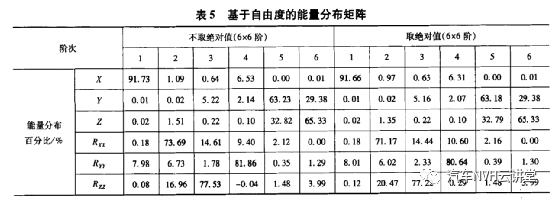
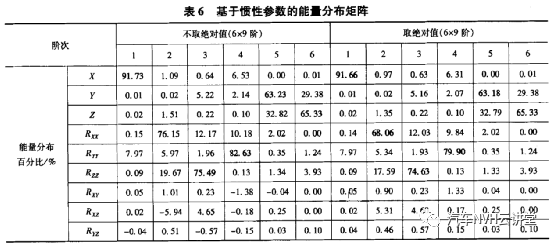
应用各自得到的主振型矩阵,分别依据式(4)~式(8)或式(9)一式(18),同时考虑是否取绝对值,可得到相应的能量分布矩阵,x、y、z分别表示纯平动能量,Rxx、Ryy、Rzz分别为绕坐标轴纯转动能量,Rxy、Ryz、Rzx则为惯性积引起的平面交换能量,见表5和表6。其中表6所示结果分别由Maflab与ADAMS计算得到。
由表5和表6可知,基于自由度的能量分布矩阵与基于惯性参数的能量分布矩阵中,均因惯性积的存在而出现了负值能量。取绝对值后计算的模态能量总和稍稍增大,各元素也相应地发生改变,但是不影响对主振动能量在各自由度或惯性参数上分布的定性判断。另外无论是否取绝对值,式(19)~式(22)所示关系均能得到满足。
5 结论
(1)基于系统自由度而定义的6×6阶模态能量分布矩阵,体现了主振动中振动能量在系统各自由度上的分布情况,物理意义明确、便于理解。
(2)ADAMS中定义的6×9阶能量分布矩阵,与系统自由度并不对应,但是能够更明确地反映惯性张量中不同元素的影响。
(3)两种模态能量分布矩阵,取绝对值计算得到的能量分布与依据基本定义得到的结果不同,但仍能准确地反映出主振动能量在各自由度或惯性参数上的分配情况。
(4)对于任一阶主振动,无论是否取绝对值进行计算,两种表达方式给出的模态能量总和相等、平动能量也彼此相等;描述转动的对应能量分量之间均满足模态动能定义所决定的对应关系。
作者:童炜,侯之超
作者单位:(清华大学,汽车安全与节能国家重点实验室
- 下一篇:面向碳达峰碳中和的内燃机技术概述
- 上一篇:汽车芯片测试认证,国创中心给你解决方案



 广告
广告 



最新资讯
-
联合国法规R86对农林拖拉机灯光安装的工程
2026-03-18 12:20
-
联合国法规R78对L类车辆制动系统的工程化约
2026-03-18 12:16
-
联合国法规R77对机动车驻车灯静态可见性的
2026-03-18 12:16
-
TCT亚洲展启幕!思看科技人气爆棚,这些产
2026-03-17 19:17
-
东扬精测系统喜获奥地利Seibersdorf Labora
2026-03-17 17:05
