




 广告
广告





















































知识分享 | 力/扭矩传感器的负载分析

力/扭矩传感器的负载分析
选择合适的力/扭矩传感器其实很简单:你只需要知道测量什么量,大致的测量范围是什么?
当你找到了这两个问题的答案后,还有几个方面需要考虑,包括:传感器的负载限制,可允许的负荷,需要特殊考虑的方面,以及如何做出合理的评估。
技术参数表规范及其关系
当查看多分量力/扭矩传感器技术参数表时,如HBK MCS10,您会发现有最大允许载荷、力矩或要遵守标准的详细信息(见图1和图2)。数据可能因制造商或类型而异。然而,在寻找最适合的多分量传感器时,标准始终起着决定性的作用。
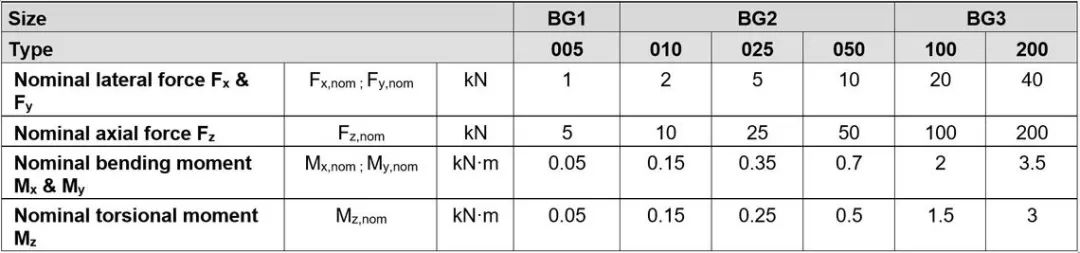
图1 MCS10 额定载荷技术参数
仔细查看这些参数时,您会发现一些需要解释的相关术语:
-
额定力/额定扭矩
-
极限载荷/极限扭矩
-
破坏载荷/扭矩
-
负载率总和 (LRS)
-
在多轴载荷下满足的标准
1)额定量程
2)疲劳强度
- 在脉动负载下
- 在交变负载下
-
静态载荷
理解各个术语之间如何关联的最好的方法是考虑哪些负载可以发生,以及如何对它们进行分类。在应用中,除此处所示的机械载荷外,还应考虑其他载荷,例如由温度或其他环境影响而产生的载荷。然而,在大多数情况下,这是没有必要的,或者在有疑问的情况下,可以快速识别判断。无论我们谈论的是单轴还是多轴、静态还是动态、脉动还是交变负载,都应该采用一些测试标准来确保传感器的安全运行。
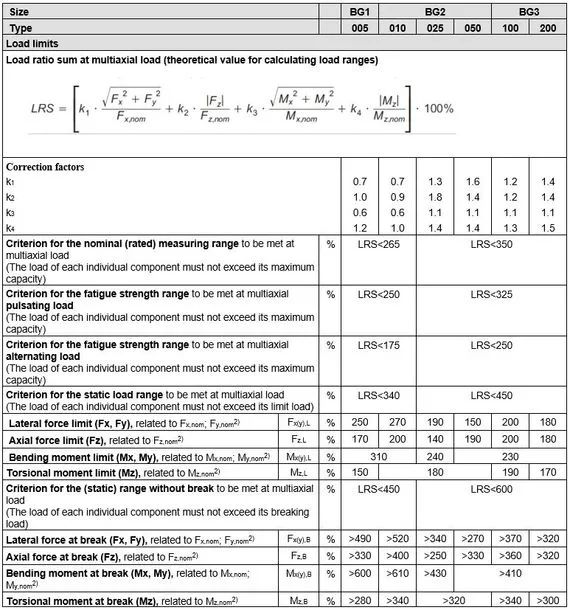
图2 MCS10极限载荷参数
单轴&多轴负载
单轴载荷是指传感器在坐标系的一个方向承受载荷。如果增加了其它方向的载荷,无论是力还是力矩,这都被称为多轴载荷。最多可同时发生六个载荷:三个力Fx、Fy、Fz和三个力矩Mx、My、Mz。
通常,外部施加的载荷会对传感器的测量体产生机械应力。在多轴载荷的情况下,需要将它们组合起来,以便将它们与试验标准进行比较。这里,这是通过计算负载率总和(LRS)来实现的:

该公式包括所有现有荷载、最大允许载荷和四个修正系数。这些也可以在MCS10数据表中找到(见图2)。
静态与动态、脉动与交变负载
静态负载意味着传感器承受的负载不会随时间变化,也就是说,它是恒定的。另一方面,动态载荷意味着载荷随时间而变化,也就是说,它不是恒定的。在许多应用中,静载荷涉及施加和移除载荷的过程。在达到静载荷之前,载荷会动态增加,当载荷被移除时,载荷会再次动态减少。通常,这些应用程序可以被认为是纯静态的,如有疑问的话,也可以将负载的施加和移除视为单独的动态负载情况。
动态载荷可进一步分为脉动载荷和交变载荷。这里的决定性因素是,在脉动负载下,负载方向不会发生逆转。这意味着,施加在传感器上的压向力或拉力,或是某个方向上的扭力,只有有时更强,有时较弱。另一方面,交变加载意味着拉力和压力或顺时针和逆时针扭矩交替变化。荷载的符号反转也说明了这一点。图4显示了这三种情况下施加荷载随时间变化的示例。交变负载的测试标准是最严格的,因为它们对传感器施加了更大的负载。
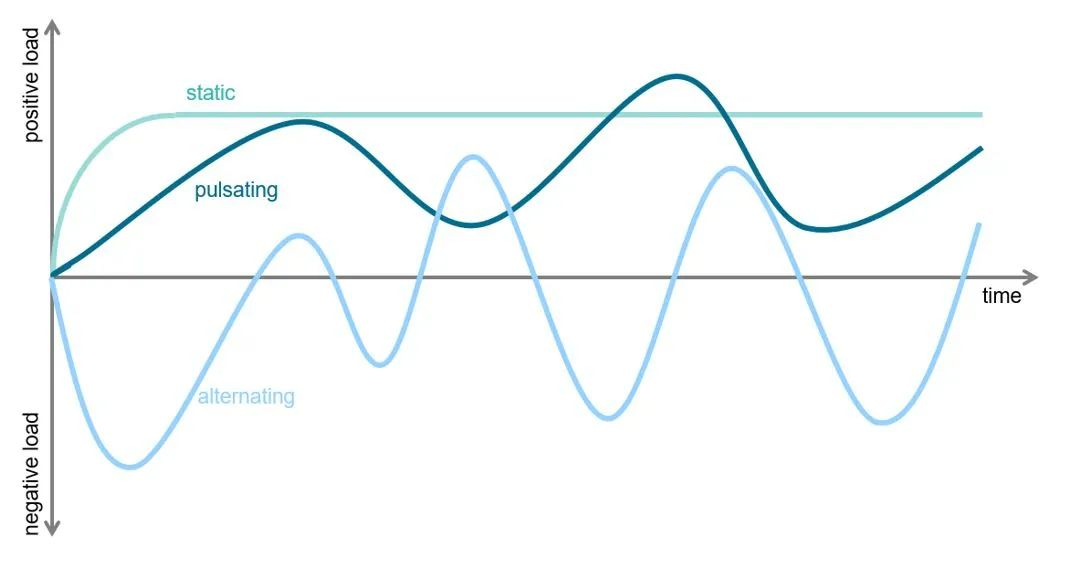
图4 静态、脉动和交变负载
额定量程,极限负载,破坏负载
区分这三个参数并不特别困难,然而必须确保传感器的安全使用。在额定量程内,传感器的技术指标都在保证范围内。对于超过额定量程且范围达到极限负载的负载,无法再保证其满足技术规格。但是,此范围内的负载仍然是允许的,如果不经常发生,则不会损坏传感器。当进一步将载荷增加到极限载荷和断裂载荷之间时,测量体变形会达到永久损坏的程度,传感器无法再用于进一步测量。超过破坏载荷极限的载荷将导致传感器断裂。需要注意的是,这些荷载范围仅适用于单轴和静荷载情况。
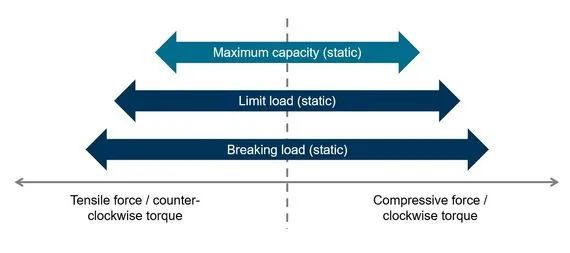
图5 静态负载量程
特殊方面和可能的遗漏
一个可能微不足道但偶尔被忽略的方面是,传感器必须承受所有六个方向的负载,即使它们未被测量。例如,如果使用三维力传感器(Fx、Fy、Fz),其也必须要能够承受同时产生的力矩,即使它们未被测量。这些力矩包括直接作用的扭矩,以及施力点到坐标原点杠杆产生的力矩,后者导致了另一个特殊性:对于MCS10,坐标原点的位置位于测量体的中心。如果力Fx1 直接施加在测量物体表面,则会产生杠杆臂 lh (传感器高度的一半)和力矩My。例如,如果力被加载到距离传感器更远的位置,则杆臂为lh + l加上力Fx2,将会产生更大的力矩My。因此,应始终尽可能靠近传感器施加力,如果操纵杆较长,则应仔细观察。
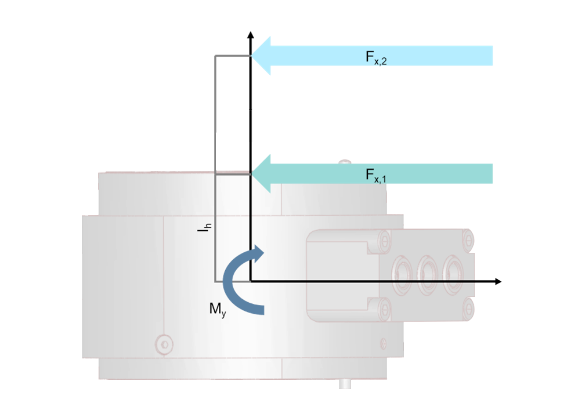
图6 力导入点和产生的力矩
实际应用
了解完不同类型的载荷、极限和标准后,下面就是如何估计应用中传感器的载荷的问题。以下过程已被证明是可行的:
选择额定量程
在大多数情况下,如果测量的方向是已知的,最大量程即为负载绝对值。
确定发生的所有荷载
每个载荷方向的最大载荷可从应用中出现的最大载荷以及几何布置(扭矩=力x杆臂)中得出。需要注意的是这些不仅作为一个绝对值,还包括符号。这项任务通常很耗时,尤其是对于复杂的设置和相互作用的力。然而,它是可靠评估的基础,因此是必要的。除最大荷载外,其他荷载也可能相关。尤其是当涉及不同类型的负载时。例如,如果最大负载为静态负载,但较小的负载为交变和动态负载,则必须对这两种情况进行调查分析。
荷载工况的定义
通常,并非所有荷载都同时发生。可能存在两个力和一个力矩的常规情况,以及使用不同力开始和停止加载的状况。为了能够单独考虑这些情况,将它们细分为独立的负载情况并单独研究每个负载是有意义的。建议为此创建表格。
考虑每个荷载工况
本页上的交互式指南有助于找到正确的极限值或正确的标准,以便在此步骤中检查各个荷载工况。对于不同的荷载情况,需要将实际荷载与极限值进行比较并进行评估,或者将该情况下计算的LRS与相应的标准进行比较并进行评估。为了避免每次手动计算LRS,可以 下载 Microsoft® Excel® 模板。这使您能够自动执行此步骤。
全面评估
完成上述步骤后,您将获得一个表格,理想情况下,该表格仅包含各个荷载工况的正向结果。在这个表格中,不仅要注意OK(正常)或not OK(不正常),还要注意确切的结果。这样就很容易看出是否选择了不正确量程的传感器,或者所有结果是否一致。
结论
选择和评估多分量传感器并非易事。如果你遵循这个循序渐进的过程,准备一个流程图,这个问题可以很容易地处理,得到一个可靠的结果。
- 下一篇:追求更高精度校准
- 上一篇:波形测量仪器的远程操控



 广告
广告 编辑推荐




最新资讯
-
东扬精测|CLNB 2026 苏州|世界顶尖的测试
2026-04-03 09:48
-
EA-BIM 20005多通道电池阻抗测试仪如何赋能
2026-04-03 09:46
-
自动泊车测试进入厘米级时代——从最新测试
2026-04-03 09:10
-
真正决定城市体验的,不是硬件,而是控制系
2026-04-02 14:26
-
LabVIEW传奇工程师亲临现场,NI测试测量技
2026-04-02 14:24
