




 广告
广告





















































乘用车悬架参数对制动跑偏性能影响的研究

摘要:车辆在制动过程中如果发生跑偏,希望通过合理的悬架参数设定来抑制跑偏现象。本文选取了两个悬架参数,首先通过理论分析研究它们对制动跑偏性能的影响,随后找到与这两个悬架参数敏感度高的悬架零部件,通过改变零件状态调整两个悬架参数值,再借助carsim仿真和整车试验的方法对理论分析进行验证。最终得出车辆悬架参数及悬架零部件如何影响制动跑偏性能,为前期的设计提供参考依据。
1引言
汽车制动跑偏,是指汽车在制动时自动偏向一方,很可能造成严重事故。造成汽车制动跑偏的原因很多,包括了制动器、悬架系统、前轮定位和轮胎等因素。其中大部分原因都是车辆状态与正常状态不一致,如同轴左右制动力不等,悬架系统损坏变形,转向节松旷及前束调整不当等,车轮定位参数不对称也是造成车辆制动跑偏的一个重要原因。本文以乘用车为基础,重点研究麦弗逊悬架系统特性参数对车辆制动跑偏的影响,即当车辆由于各种原因发生制动跑偏时,这些悬架参数的变化如何抑制或放大制动跑偏的现象。研究结论可以指导悬架及底盘系统的前期设计,在早期对车辆的性能有更深入的理解。
悬架系统总成的特性参数主要是指悬架的K&C特性参数和车轮及悬架的几何定位参数静态设计值。所谓K&C特性可以分为K(kinematic)特性和C(compliance)特性。K特性即悬架运动学特性,是指车轮在垂直方向上往复运动的过程中由于悬架导向机构的作用而导致车轮平面和轮心点产生角位移和线位移变化的特性,表示只与悬架连杆有关的弹簧变形过程;C特性即悬架弹性运动学特性,是指地面作用于轮胎上的力和力矩所导致的车轮平面和轮心产生角位移和线位移变化的特性,施加力导致的变形跟悬架系统的弹簧、橡胶衬套以及零部件的变形有关。车轮定位参数静态设计值是指车轮前束角和车轮外倾角的设计名义值,悬架几何定位参数是指主销内倾角、主销后倾角、主销偏置距、主销后倾拖距等设计名义值。
在split μ(左右轮路面附着系数不同)路面制动实验中,不同的主销偏置拖距(scrub radius/mm)会影响车辆制动跑偏偏移量。图1中的scrub radius定义为正值。在车辆制动过程中,悬架系统受力情况与K&C试验中纵向力加载工况类似,因此C特性参数纵向力转向率(brake force steer/Deg/KN)也会对制动跑偏有直接的影响,制动时前轮有toe-out(前束变小)趋势时定义其为正值。本文也将主要研究这两个参数与制动跑偏的关系。
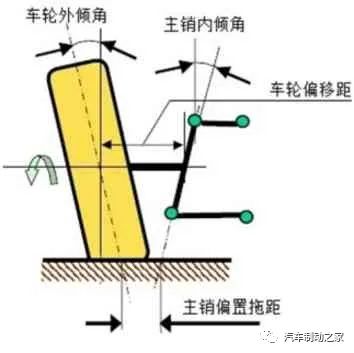
图1 主销偏置拖距Scrub Radius
本文首先通过理论分析得到两个悬架系统参数如何影响车辆制动跑偏稳定性;再借助仿真分析的方法找到对两个参数影响度较大的悬架零件,通过改变零件状态改变车辆制动跑偏性能。借助Carsim软件建立实车模型,模拟制动跑偏工况分析车辆在不同的悬架参数下制动跑偏的差异;再通过不同的悬架零件状态改变悬架参数,实车上进行试验验证,从而总结出两个悬架K&C参数如何影响车辆制动跑偏性能,为今后的底盘架构设计的前期开发提供参考。
2理论分析
假设车辆受到左右两个方向的制动力不同(FxL < FxR),会以车辆质心为中心产生一个横摆力矩Myaw(>0)使车辆向右跑偏(定义顺时针方向转动为正)。当Scrub radius值为负时,左右车轮分别产生一个大小不同方向相反的转向力矩,综合后在车辆上形成一个总的转向力矩Msteer。

Msteer刚好可以与整车的横摆力矩Myaw相抵消,因此可以抑制车辆的制动跑偏效应(如图2所示)。同理,当scrub radius值为正时,Msteer >0,转向效应会放大制动跑偏趋势。
同样,车辆左右两边受到不同的制动力(FxL< FxR),当brake force steer为负时,转向前轮产生toe-in趋势,左右车轮分别产生一个大小不同方向相反的车轮转角(定义顺时针方向转动为正),综合后在车辆上形成转向效应。

δ产生的转向效应刚好可以与整车的横摆力矩Myaw相抵消,因此可以抑制车辆的制动跑偏效应(如图3所示)。同理,当brake force steer值为正时,δ > 0,转向效应会放大制动跑偏趋势。
3悬架零件对悬架参数scrub radius和brake force steer的影响
通过前文的描述,在不改变悬架结构参数的基础上,可以直接调整前轮距来改变Scrub Radius值。轮距的调整可以通过改变车轮偏距wheel offset的值来实现。Wheel offset定义为车轮安装面与车轮中心的距离(图4),wheel offset值越小,车轮越向外侧移动,scrub radius值即变大,如果scrub radius初始状态值为负,通过不断地调整可以使之变正。在轮毂与车轮的安装面上添加垫片,可以来减小wheel offset,使scrub radius越来越大直至变正。
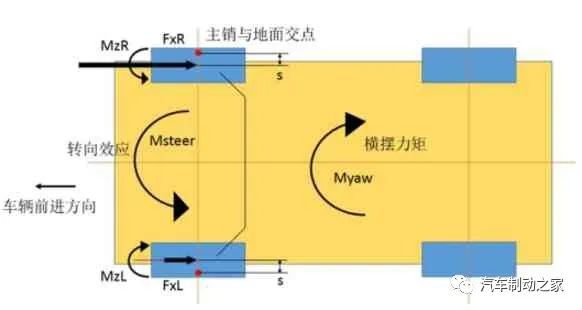
图2 主销偏置拖距Scrub Radius对制动跑偏的影响
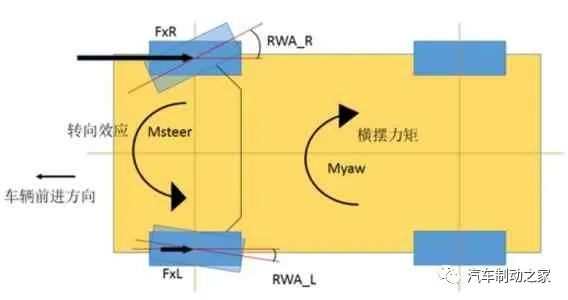
图3 纵向力转向率Brake force steer对制动跑偏的影响
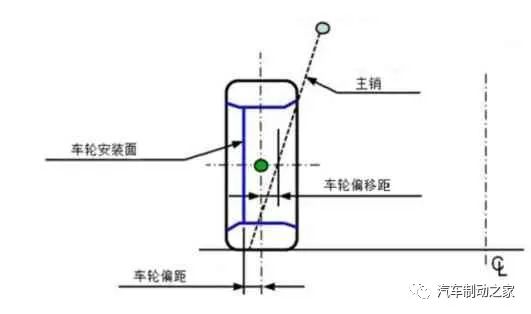
图4 车轮偏距wheel offset
影响brake force steer的因素有很多,根据经验分析主要分为以下两类:硬点位置和衬套刚度。硬点位置方面,通过仿真分析可以找到对brake force steer有较大影响的几个关键硬点,但是改变硬点坐标会影响KC其它参数性能,同时还存在与周边零件干涉的风险,故暂不考虑此方案。
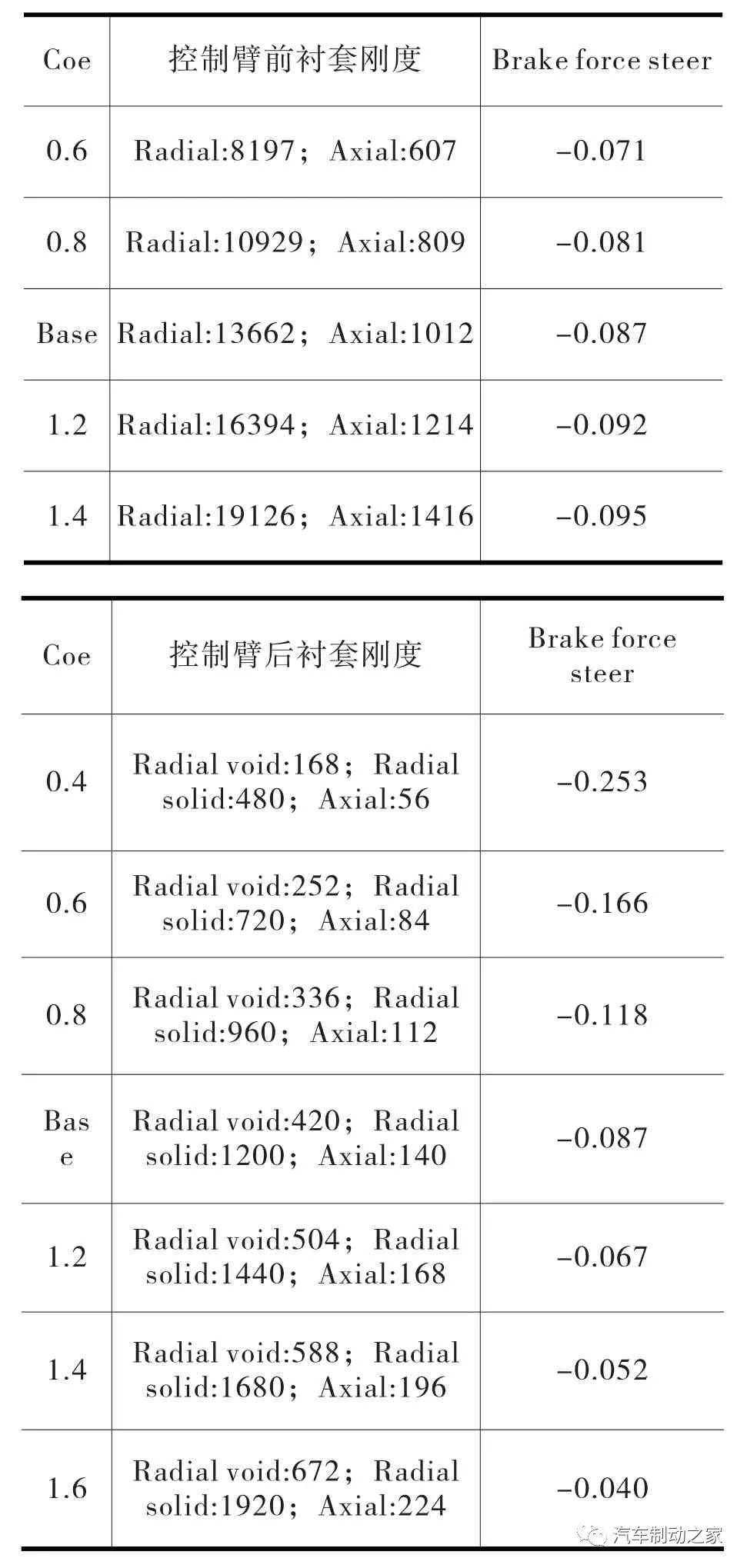
衬套刚度方面,可以调整与Ride & Handling性能相关的控制臂衬套刚度(bushing stiffness)来改变brake force steer。研究控制臂前衬套和控制臂后衬套,发现控制臂后衬套的刚度对brake force steer的敏感性较高(表1)。可以通过改变控制臂后衬套刚度的方式来改变brake force steer的值。
表1 bushing刚度与brake force steer关系
4方案设计
选取某在售成品车型作为研究的基准,原车状态下scrub radius初始值为-10mm,为了能够全面反映其影响,再分别调整其为0mm和+10mm,研究制动跑偏有何变化。
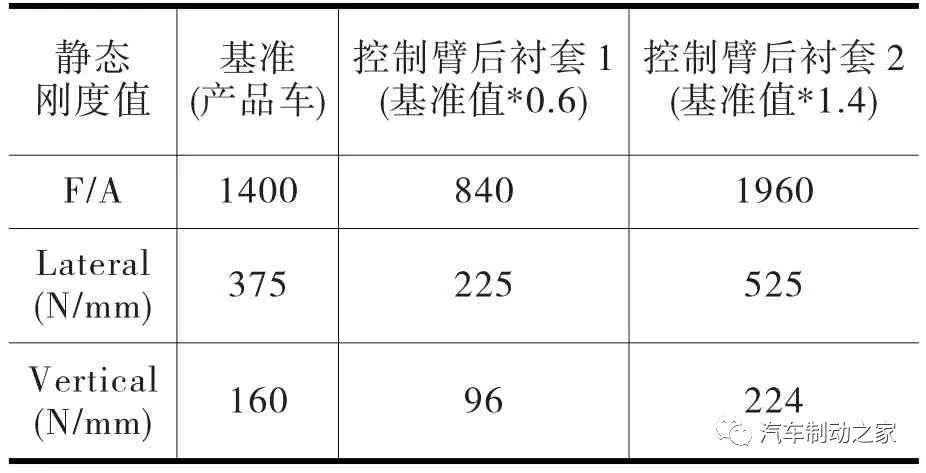
brake force steer以原车状态为基准,上、下调整其值研究对制动跑偏的影响。根据本文第2部分的研究,可以通过更换不同刚度的控制臂后衬套来实现brake force steer值的调整。控制臂后衬套的选取如表2所示。
表2 三组控制臂后衬套
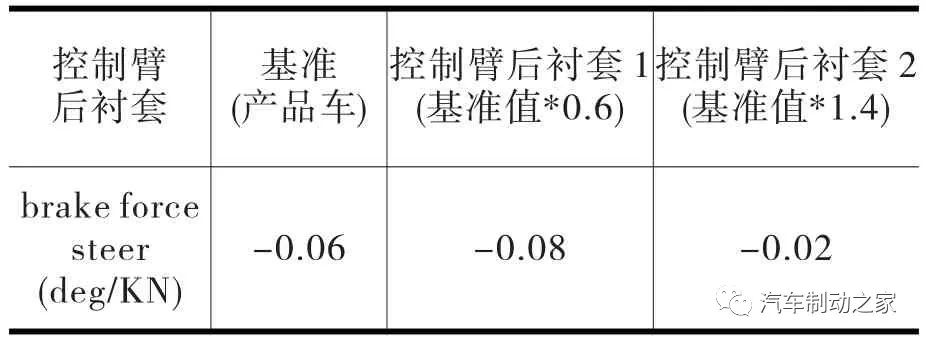
更换几组控制臂后衬套分别进行K&C试验,随着bushing刚度的增加,brake force steer的值也增加(偏正趋势),如表3所示:
表3 三组控制臂后衬套对应的brake force steer
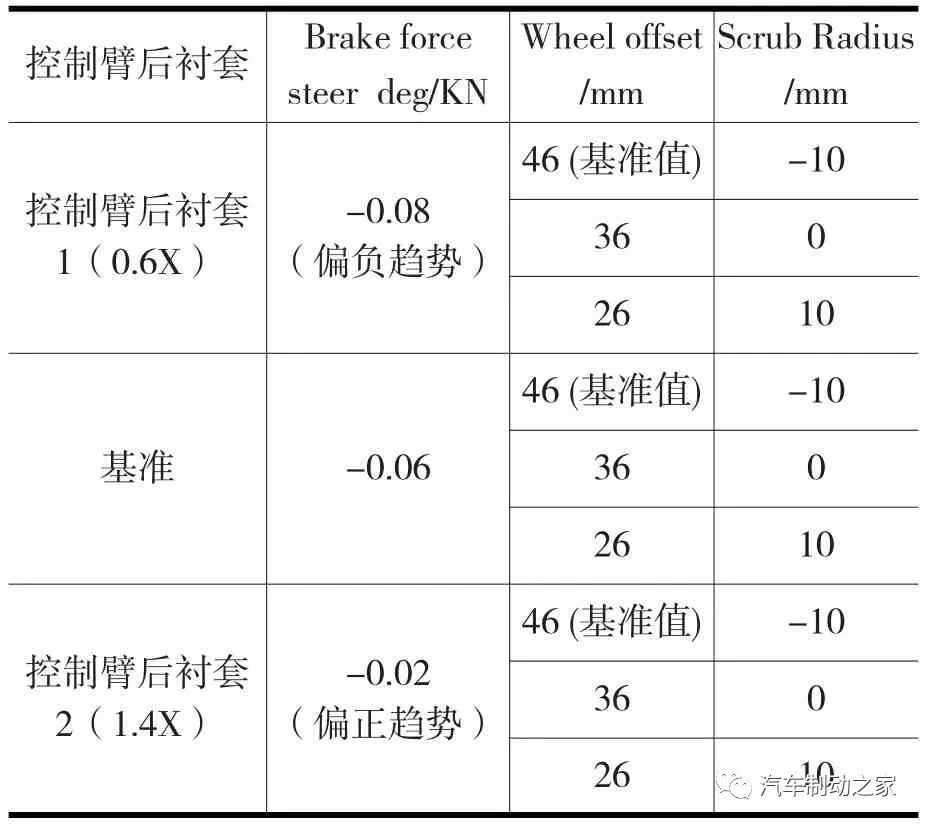
在实验中,分别取三组控制臂后衬套和车轮,构造实验轮次共9次如表4所示:
表4 试验轮次设计
在实验和仿真分析中,设定制动跑偏的初始车速为100km/h,分别执行0.2g,0.4g和0.6g减速度的制动。人为地在车辆制动系统中将左前和右前车轮的制动力调整为不同(0.9:1)使车辆发生制动跑偏现象,再记录不同的brake force steer和scrub radius组合如何影响制动跑偏。
5Carsim仿真分析悬架参数对制动跑偏的影响
CarSim是一种专业的车辆动力学仿真软件,能准确模拟车辆对驾驶员操作行为、空气动力学以及路面激励的响应,在车辆操纵稳定性、平顺性、燃料经济性、动力性等领域有广泛应用。carsim建模的核心是参数化建模,主要是针对车辆基本参数、悬架K特性、悬架C特性和轮胎特性建模。本文基于某乘用车的K&C测试数据建立整车模型。图5介绍了在carsim中建立车辆模型的主要过程。
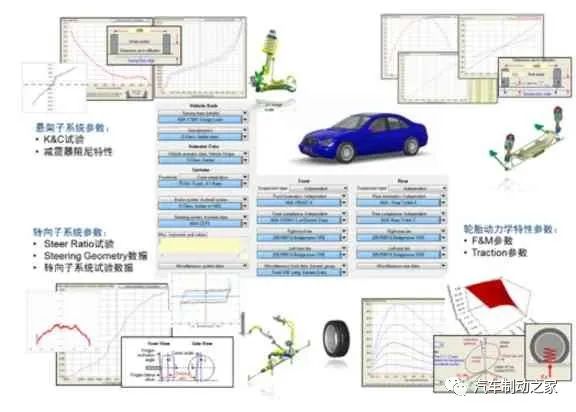
图5 Carsim中车辆模型的建立
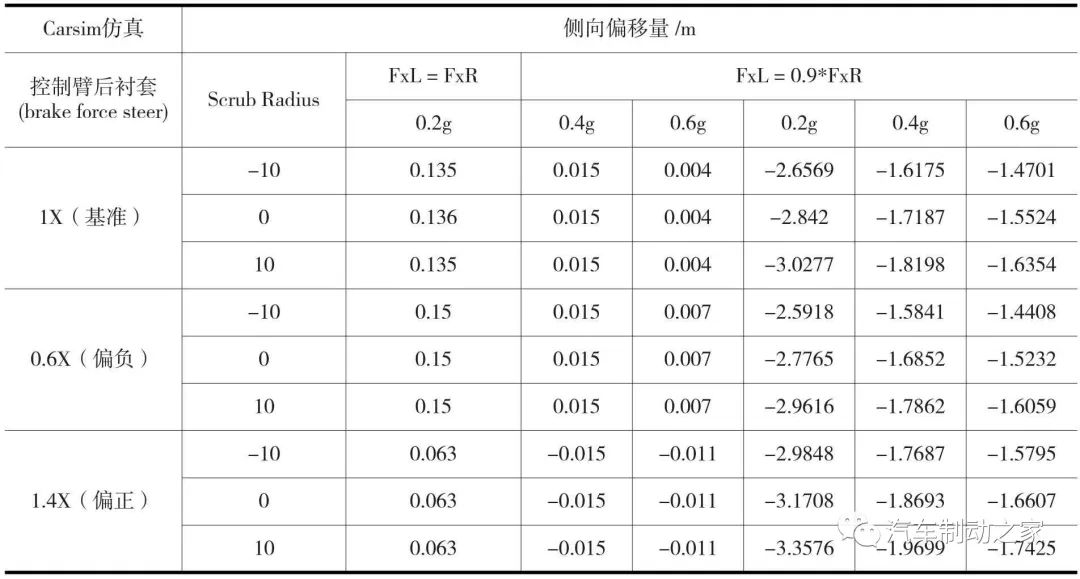
车辆模型中,在转向系统里可以直接修改scrub radius;在前悬架C特性参数中,通过“Toe/Fx coefficient”修改brake force steer。按照前文的设计方案,模型中其它参数皆不变,用不同的brake force steer和scrub radius组合进行仿真。由于carsim软件条件限制,制动时的方向盘力矩不准确,只作为参考;制动时设置方向盘转角始终为0,相当于方向盘处于锁死状态。用制动后车辆的侧向位移作为跑偏指标,最终的仿真结果如表5所示。在左右制动力相同的情况下,车辆基本不发生跑偏,在左右制动力不同的情况下,可以发现不同的scrub radius和brake force steer下侧向偏移量不相同,并且有一定的规律,后面会继续分析。
6试验验证悬架参数对制动跑偏的影响
与仿真不同,使左右制动力按比例分配的方法需要单独加工一个比例阀来调节一侧车轮的管路压力。该装置可以接在ABS模块左前轮制动管路压力输出口后,按照90%的比例调节管路压力,使得左前轮制动力为右前轮制动力的90%,人为地使车辆制动时发生跑偏。试验操作需采集并监测横、纵向车速,侧向、纵向加速度,航向角,横摆角速度和侧向位移等通道数据。
表5 Carsim仿真制动跑偏量结果
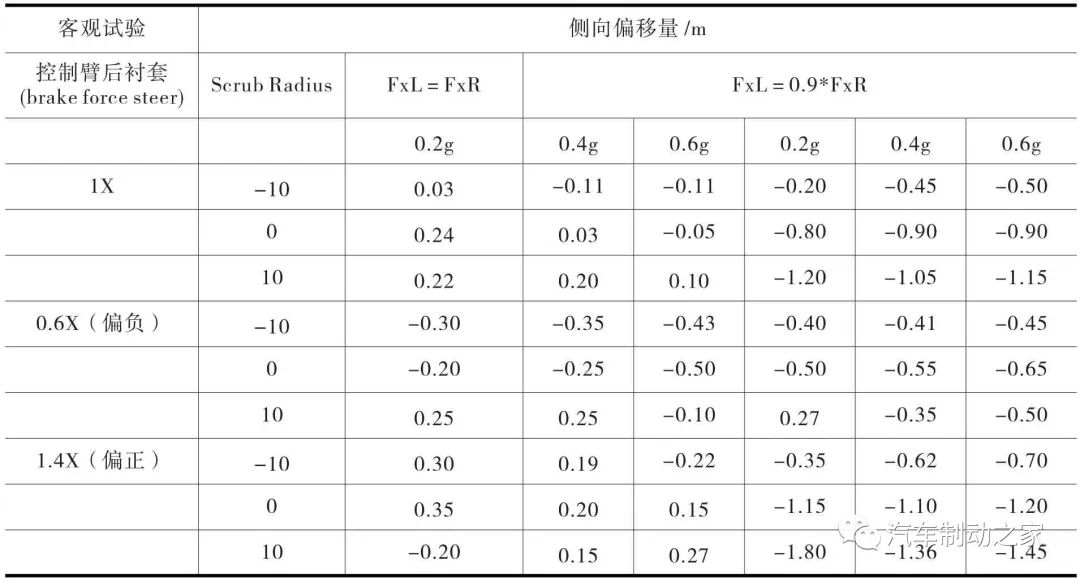
制动跑偏试验中,需要通过零件的更换来调整brake force steer和scrub radius值。根据前文的分析,可以使用不同规格的车轮来实现不同的wheel offset,从而得到几组不同的scrub radius值。再更换已经加工好的控制臂后衬套(集成在控制臂中),得到几组不同的brake force steer值。按照之前设计的方案选取不同的组合分别进行试验采集数据。试验工况与仿真工况类似,都是车辆滑行到100km/h时开始制动,用制动后车辆的侧向位移偏移量作为最终的指标。与仿真不同的是,试验中锁死方向盘的方法不容易操作,重复性差,因此采用制动时撒手的办法,方向盘没有力矩输入的条件下测量制动跑偏量。将试验的结果进行处理,得到不同悬架状态的制动跑偏量如表6所示:
表6 制动跑偏量试验结果
7结论
从试验和仿真结果看,brake force steer和scrub radius变化对制动跑偏的影响与理论分析结果有同样的趋势。在brake force steer相同的情况下,scrub radius越大制动跑偏越严重,因此scrub radius偏负对制动跑偏有一定的抑制作用。相似的,在scrub radius相同的情况下,brake force steer越大,即控制臂后衬套刚度越高,制动跑偏越严重。设计悬架参数时可以使Brake force steer偏负一些,这样有利于抑制制动跑偏。同时可以发现,仿真与试验可以较好地对应,在前期的设计开发中可以应用仿真的手段来分析类似的问题。
在底盘悬架系统前期的设计开发中,brake force steer和scrub radius的值是受很多因素决定的,制动跑偏只是其中的一个方面。如果在前期的开发中,其中一个参数值由于各种限制原因不得不取在有可能发生制动跑偏风险的范围内,则可以通过调整另外的参数值来弥补这一风险,这在前期架构开发中具有很重要的意义。
本文来源于泛亚汽车技术中心有限公司,著作权归作者所有



 广告
广告 



最新资讯
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
