




 广告
广告





















































科普向,一文详解V2X HIL测试

在智能网联的话题里,总是离不开V2X这个字眼,而在V2X的测试需求中又总是离不开HIL,不知你是否也经常听到以上这些,今天小K就抽丝剥茧,为你讲解V2X HIL测试的种种。
▼
目录
• 什么是V2X?
• 什么是HIL测试?
• 为什么需要C-V2X HIL测试?
• C-V2X HIL测试系统长什么样子?
• C-V2X HIL测试系统如何工作?
什么是V2X?
学一门学问要从概念开始,V2X的概念相信大家都不陌生,这里简单说一下,V2X是Vehicle to Everything的缩写,直译过来的意思是车联万物,具体指的是V2V,V2I,V2P和V2N,这几项可以在下方找到对应的解释。
V2I:指的是车辆与道路设施之间进行通信,例如,当汽车接近交叉路口时,信号灯可以告诉汽车交通信号会在什么时候切换。
V2N:指的是车辆与蜂窝网络交换数据,可以提供实时交通信息,比如施工区警告,通过 V2N 还可以提供 SOS 服务以及远程诊断和维修。
V2P:指的是车辆与行人和非机动车之间进行通信,以便在驾驶员视线受到妨碍时也能保障这些人的安全。
V2V:指的是车辆与车辆之间的通信,主要是车辆之间的短时延通信,避免车辆碰撞等安全性问题。
那这项技术是做什么用的呢?举个例子,当司机在开车时,需要手、眼、耳并用,随时注意车身附近的情况,那么我们知道为了实现高级辅助驾驶功能,车本身要逐渐代替驾驶员的作用,所以车本身也应该清楚它本身附近的情况,所以传感器技术正像是汽车本身的“眼睛”和“耳朵”,眼观六路,耳听八方,但这些就足够了吗?
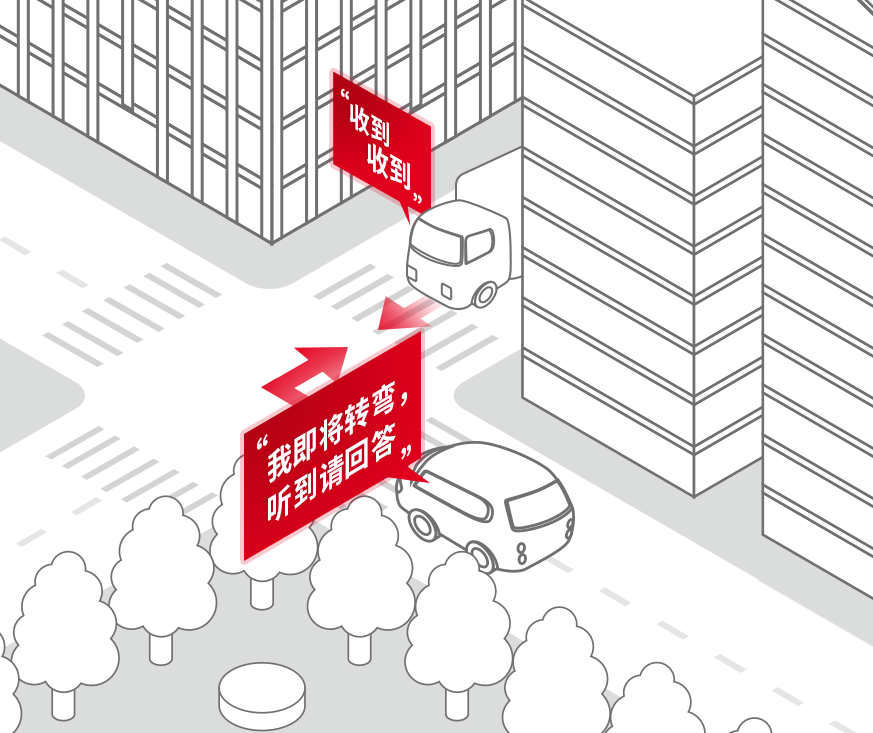
传感器本身都是有视野范围的局限性,那些它们看不到的死角,或者是道路上有遮挡物又该怎么办呢?这时就该V2X发挥作用了,通过V2X技术,车辆得以发送和接收到其他车辆、道路等参照物的通信信号,得知那些视野范围外的路况信息,从而通知车辆本身,避免事故的发生。
关于V2X,此前我们还写过一篇更详细的文章,包括它的发展、竞争与优势,详细可参照:关于C-V2X的那些事!
什么是HIL?
说完了V2X,我们再来说说HIL,HIL全程Hardware-in-the-loop,中文翻译过来叫硬件在环。还有几个和它名字很像的“兄弟”,MIL,SIL和PIL,相信搞工程的同学们对此都不陌生,所以这里不详细解释每个词的含义,简单来讲,MIL和SIL只是在软件层面(模型和代码)进行测试,PIL在前两者的基础上引入了更贴近现实的编译环境,而HIL测试则是在前面的基础上引入真实的待测物进行测试。
那么为什么需要HIL测试呢?由于汽车本身的零部件繁杂,很多系统硬件和软件也是在并行开发,HIL测试可以有效地对单个系统进行测试,避免集成后出现严重的bug,同时对于一些危险性比较高或者是极端的情况,也可以使用HIL来进行测试。在后续的文章中,我们也会为大家以V2X HIL系统为例,让大家了解HIL测试系统的架构。
为什么需要C-V2X HIL测试?
前面我们说过V2X的本质在于通信,在V2X测试中,测试的对象往往是OBU/RSU(车载单元/路侧单元),负责收发信号,怎样测试它是否符合标准呢?
当然是车上带着它在测试路段走一圈,针对不同场景来看看数据,但这说起来简单,实际上非常费时费力,搭建真实场景不仅费时费力,重复测试和极端情况测试也很难,安全性无法保证,测试周期长,效率也很低。所以在真正的路测之前,先进行HIL测试,安全,准确可重复地对OBU/RSU测试就很有必要。下面我们就来看一下,如何来进行V2X HIL测试吧。
C-V2X HIL测试系统长什么样子?
首先我们来看一下整个测试系统的架构。下图是由是德和怿星共同搭建的C-V2X HIL测试系统的方案架构,我们以此图为例,让大家来看看V2X HIL测试包含哪些部分,该方案的DUT为OBU,所以在下方的文案中,我们也从OBU的角度进行解释。
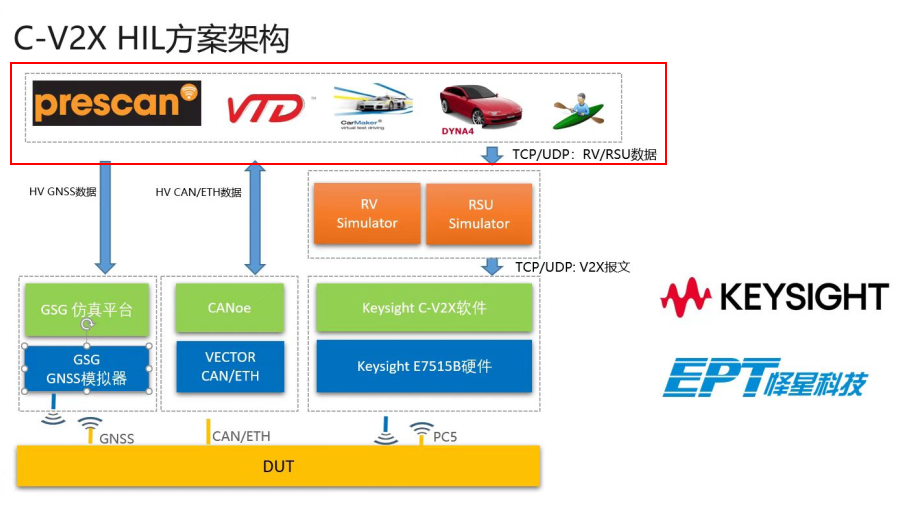
红色部分:红色部分是场景仿真软件,前面我们讲过,在路测之前,无法把OBU/RSU带到真实的环境中进行测试,所以为了解决这一难题,通常使用场景仿真软件来代替真实场景进行测试,常用的场景仿真平台如图中的PreScan,VTD和CarMaker等等。
典型的场景包括FCW(前向碰撞预警场景),DNPW(逆向超车提醒场景),LTA/ICW(左转和交叉路口盲区提醒场景)等等,还有一些典型场景可以参考中国汽车工程学会发布的T/CSAE 53-2017标准,当然有时也有用户自定义的一些场景,图中所示的这套系统也可以进行支持。

CSAE第一期V2X场景
(图片来源于中国汽车工程学会标准 T/CSAE 53-2017)
从场景中获取的数据有三类:
•
RV/RSU数据:远车,路侧单元数据
•
HV CAN/ETH数据:主车运动消息
•
HV GNSS数据:GNSS定位和授时信号
下面就这三类数据各自的部分进行架构的讲解:
RV/RSU数据传输包括:
RV Simulator/RSU simulator:此部分主要是ITS协议栈,它会负责接收场景中的RV(Remote Vehicle即场景中仿真的远车)以及RSU出数据,然后转换成报文的形式,为传递给物理层做准备,常见的报文包括BSM,SPAT,MAP,RSI等等。
注:关于V2X测试还有另外的一种测试涉及到ITS协议栈,名为一致性测试,是德科技在以往也发布过相关测试方案,本文篇幅有限不再详述,有兴趣的可以参考:是德科技联合中国信通院和东软集团成功完成C-V2X协议一致性测试
Keysight C-V2X软件和Keysight E7515B硬件:即是德科技的C-V2X测试平台,在此系统中用于射频信号测试,支持物理层的测试,E7515B单表是可以支持4G,5G信号的测试,在此系统中主要用于V2X的测试,在接收来自ITS协议栈的报文后,会通过PC5将信号传输到DUT。
HV CAN/ETH数据传输包括:
CAN卡/以太网卡:接收来自仿真场景中的车身运动信息,完成数据处理之后,发送给OBU。
HV GNSS数据传输包括:
GNSS模拟器平台:在此系统中使用的是GSG设备,负责接收来自场景中的仿真的GNSS信号作为自身的动态输入,在HIL系统中需要它来实现动态更新,GNSS模拟器在实际测试过程中与E7515B进行物理连接,完成时间的同步,然后发送射频信号给OBU,再完成与OBU的时间同步。
了解了图上的系统架构以及基本概念之后,让我们来看一下实际的测试系统长什么样子?

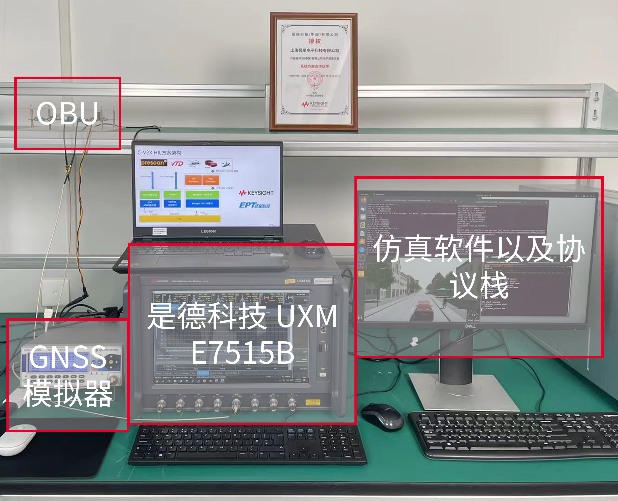
简要概括一下这套C-V2X HIL测试系统的特点:
整套系统由是德科技无线综测仪,GNSS模拟器和V2X场景仿真平台以及协议栈组成。
从物理层来讲,是德科技的UXM支持4G,5G和C-V2X的测试,在该系统中充当射频和接入层测试的主要设备,硬件计算资源强大,对于上层复杂场景如拥塞,多目标等都能轻松支持;接口开放,支持市面上成熟的C-V2X协议栈,满足协议一致性测试需求。
从上层来讲,整套系统支持各类成熟的商用仿真平台,同时可以仿真CSAE标准场景和自定义场景;协议栈方面,支持国标各类报文,以及集成了可支持安全策略的扩展接口。



 广告
广告 编辑推荐




最新资讯
-
助低空经济落地,路空一体安全技术研讨会在
2026-03-26 18:27
-
联合国法规R83对车辆污染物排放型式批准的
2026-03-26 12:19
-
国家智能汽车电器质量检验检测中心落地杭州
2026-03-26 08:33
-
漂移、赛道、弹射:智能底盘如何把极限变成
2026-03-26 08:32
-
国内单体最大综合试验场启用,为“智驾+低
2026-03-25 15:12
