




 广告
广告





















































浅谈自动驾驶传感器激光雷达
2022-02-09 12:39:36· 来源:ADS智库

本文将从激光雷达的结构、工作原理、分类以及在自动驾驶的应用几个方面简单聊聊。01、什么是激光雷达激光雷达,英文:Laser Radar,也称光学雷达(Light Detecti
本文将从激光雷达的结构、工作原理、分类以及在自动驾驶的应用几个方面简单聊聊。
01、什么是激光雷达
激光雷达,英文:Laser Radar,也称光学雷达(Light Detection And Ranging,LiDAR)是激光探测与测距系统的简称,它通过测定传感器发射器与目标物体之间的传播距离,分析目标物体表面的反射能量大小、反射波谱的幅度、频率和相位等信息,从而呈现出目标物精确的三维结构信息。
02、激光雷达的组成
激光雷达主要包括激光发射、接收、扫描器、透镜天线和信号处理电路组成。激光发射部分主要有两种,一种是激光二极管,通常有硅和砷化镓两种基底材料,再有一种就是目前非常火热的垂直腔面发射(VCSEL),VCSEL 的优点是价格低廉,体积极小,功耗极低,缺点是有效距离比较短,需要多级放大才能达到车用的有效距离。机载和车载激光雷达系统有三个核心组件:LiDAR传感器、GNSS系统、IMU。
-
LiDAR传感器:整个激光雷达系统中,LiDAR传感器是最重要的部分,这部分作用是发射和接收脉冲激光来确定环境的范围和形状。
-
GNSS系统:即全球定位系统,可将LiDAR数据与物理位置进行结合,使点云具有绝对坐标。
-
IMU:惯性测量单元,实时记录系统姿态信息,确保系统姿态数据的真实性。
将这三个不同的数据进行结合,同时传感系统全部协同工作,以实现LiDAR系统获取高精度点云数据。
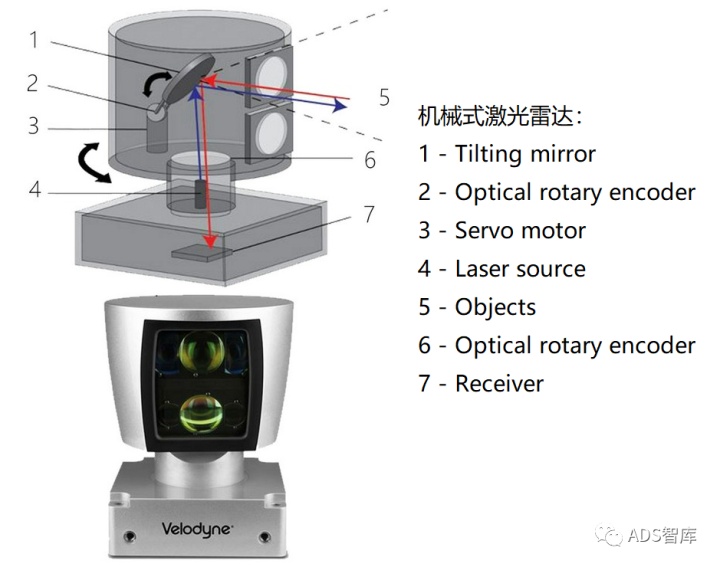
03、激光雷达的工作原理
激光雷达是由激光发射器、接收器、和惯性定位导航三个主要模块组成。它基本工作原理是发射出一种激光,在遇到物体后折射回来被CMOS传感器接收,来测得本体到障碍物的距离。激光雷达正是利用了光遇到障碍物反射这一原理(这种测距方式也被称为TOF飞行时间法)。
激光是大量原子由于受激辐射所产生的发光行为。激光在传播中始终像一条笔直的细线,发散的角度极小,一束激光射到38万千米外的月球上,光圈的直径充其量只有2千米左右,而普通光源散射到月球将照亮月球的三分之一。从原理来看,只要需要知道光速、和从发射到CMOS感知的时间就可以测出障碍物的距离,再结合实时GPS、惯性导航信息与计算激光雷达发射出去角度,我们就可以得到一个带有坐标方位和距离的点信息。
04、激光雷达的类型
激光雷达的类型很多,下图是佐思汽研之前文章中提到的激光雷达类型,已经很详细,本文便不多做分类。

图片来源:佐思汽研
主流激光雷达优缺点分析:

05、激光雷达在自动驾驶中的应用
在自动驾驶中,激光雷达有3D环境感知和SLAM加强定位的作用。
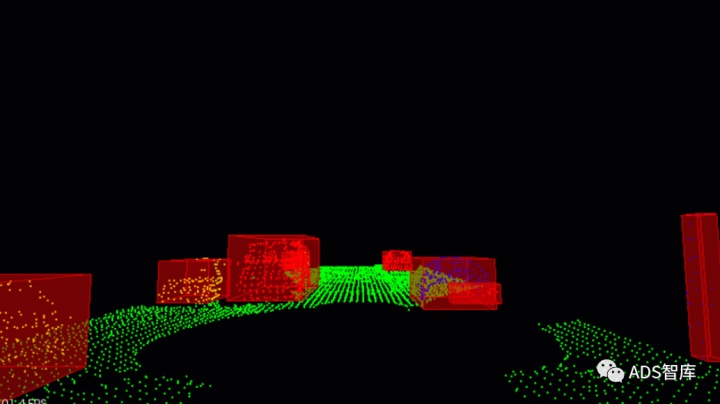
1、物体检测(Object Detection)
2、SLAM(Simultaneous Localization and Mapping)
激光SLAM是目前最稳定、最主流的定位导航方法,但在无结构的环境中,由于缺少足够的几何特征,激光雷达SLAM将发生错误。

3、多传感器标定(Calibration)
传感器标定的意义主要是让车体本身直到障碍物的位置在哪里, 因为激光雷达识别出来的物体是在激光雷达坐标系下的位置, 所以需要标定的外参来得到障碍物在车体坐标系下的位置, 以便规划模块做出决策。
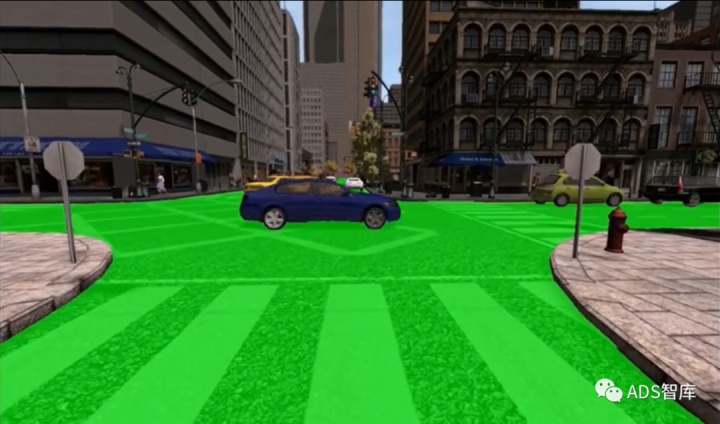
4、可通行区域检测(FreeSpace Detection)
可通行区域检测(FreeSpace detection)是自动驾驶环境感知的重要内容,而可通行区域可被假设为“地平面”,其上的点具有一致的表面法向量。下图中绿色区域便是FreeSpace。
reference:
[1] 科普中国:激光雷达的工作原理及应用
[2] https://mp.weixin.qq.com/s/Qge_xM118qkBmpGiuRX1Vg
[3] 走进自动驾驶传感器(一)——激光雷达 - 知乎 (zhihu.com)
[4] 自动驾驶离不开的激光雷达,究竟有几种分类?(baidu.com)
[5] 主流激光雷达分类及原理(meituandr)
[6] 激光雷达在自动驾驶中的应用(CSDN博客)



 广告
广告 



最新资讯
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
