




 广告
广告





















































底盘电控系统-CDC半主动悬架
2022-01-10 20:51:39· 来源:凯菩斯汽车

引言随着汽车电动化、智能化的发展趋势,对于底盘舒适性的要求越来越高。空气弹簧和连续可调阻尼减振器(CDC)是提高底盘舒适性的强有力配置,越来越多主机厂在新
引言
随着汽车电动化、智能化的发展趋势,对于底盘舒适性的要求越来越高。空气弹簧和连续可调阻尼减振器(CDC)是提高底盘舒适性的强有力配置,越来越多主机厂在新车型的配置上搭载空气弹簧和CDC。本文主要介绍某供应商的CDC系统。
系统架构
系统由四个位移传感器,三个加速度传感器,电控单元(ECU)和四个CDC减振器组成。如图1所示。位移传感器测量每个车轮与车身的相对位移,前轴两个加速度传感器和后轴一个加速度传感器测量车身垂直加速度。这些信号和CAN总线信号(比如车速、方向盘转角、纵向加速度、侧向加速度等)输入给ECU,ECU控制软件根据控制策略输出控制电流给减振器以调节阻尼力。

图1 系统架构
CDC减振器的阻尼力由基础阀系和电磁阀产生的阻尼力叠加而成。如图2所示。
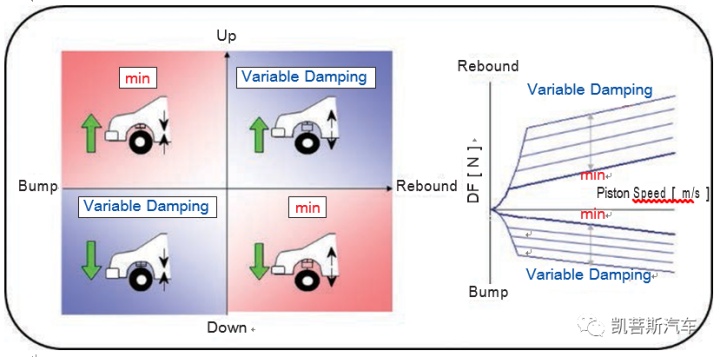
图2 CDC减振器阻尼力
控制策略
在实际驾驶工况中,CDC半主动系统需要处理多种情景。如图3所示,包括车辆状态,路面输入和驾驶员输入。本节主要介绍路面输入的控制策略,如图4所示。

图3 车辆驾驶场景

图4 车辆驾驶场景简化
CDC控制策略的主要目标是保证车辆安全和舒适性,也就是保证轮胎接地、提升车身控制以及最大化舒适性。如图5所示。而通常轮胎接地和舒适性对于阻尼力的需求是相互矛盾的,如图6所示。
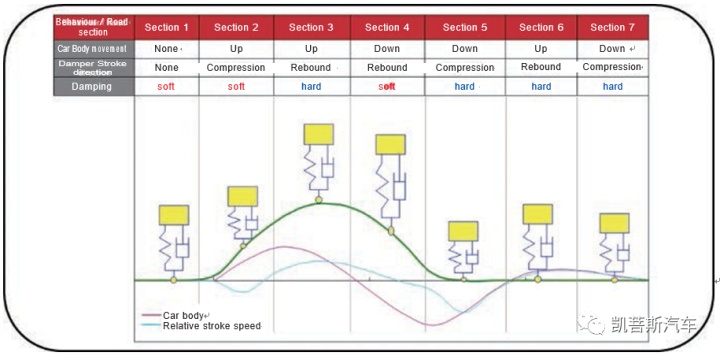
图5 车辆性能目标
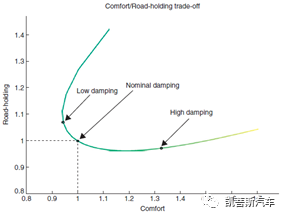
图6 阻尼力平衡
为了达到车辆的性能目标,CDC软件的控制策略由图7所示的功能模块组成。
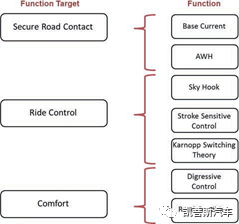
图7 控制策略功能模块
为了保证轮胎接地从而保证安全性,需要基础阻尼力。“base Current”模块的功能就是根据车辆的速度提供基础阻尼力。
为了防止车轮跳动,“Anti Wheel Hop”的功能就是根据车轮跳动的情况,在一段时间内增加控制电流从而增加阻尼力来控制车轮。如图8所示。
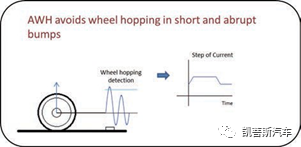
图8 防止车轮跳动模块
在保证车辆安全性之后,控制策略主要提升车身控制。“SkyHook”模块的主要功能就是提升车身控制,如图9所示。

图9 天棚阻尼控制
车辆在起伏路面行驶时,三个车身加速度传感器来测量车身运动的垂直、俯仰和侧倾速度。如图10所示。

图10 垂直、俯仰和侧倾速度
根据计算的车身运动的垂直、俯仰和侧倾速度,车辆速度以及标定的系数,天棚阻尼模块连续输出阻尼控制信号,如图11所示。

图11 天棚阻尼模块
为了增加极限行程的车身控制, “Stroke Sensitive Control” 模块的增益系数Kss乘以天棚阻尼模块输出的阻尼力。如图12所示。
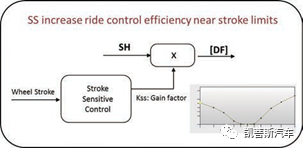
图12 行程相关模块
为了保证车身平稳,还需要考虑车身和车轮之间的相对运动。“Karnopp Switching Theory”模块就是为该功能而设计,如图13所示。
图13 Karnopp SwitchingTheory
车身和车轮之间的相对运动可以分为四种情况:车身向上运动车轮压缩或回弹,车身向下运动车轮压缩或回弹。
对于车身向上运动车轮压缩(图13第二象限)和车身向下运动车轮回弹(图13第四象限),控制策略将阻尼力设置为最小。对于车身向上运动车轮回弹(图13第一象限)和车身向下运动车轮压缩(图13第三象限),控制策略将根据要求调整阻尼力。
如图14所示,我们可以清晰地看到在车辆遇到减速带时,Karnopp开关控制的全过程。
图14 Karnopp开关控制示例
为了最大化舒适性,“Digressive Control”模块负责在路面冲击输入时减小阻尼力,如图15所示。

图15 递减控制模块
对于路面单一输入,递减控制模块非常有效,但是对于路面连续输入,需要“Road Condition”模块来控制。如图16所示。如果出现连续的车轮跳动情况,该模块将逐渐增加阻尼力直到达到理想的效果。
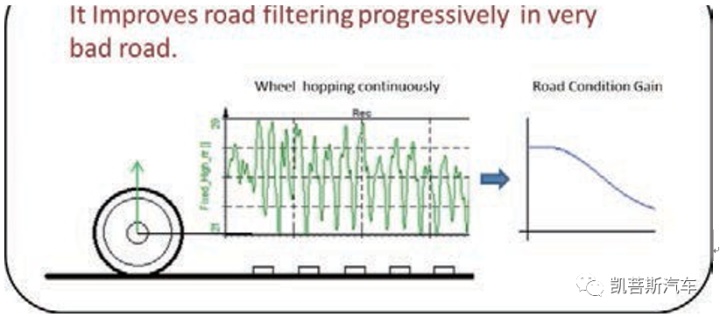
图16 连续输入控制模块



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
