




 广告
广告





















































前沿 | 识别危险状态并制定危害缓解策略的形式化方法
2021-11-23 18:41:22· 来源:轩辕实验室

本文来自实验室陈人杰的研究成果和学习笔记。该论文提出了一种形式化的建模方法,用于识别危险状态并制定危害缓解策略。考虑驾驶员、车辆和道路环境的交互,制定
本文来自实验室陈人杰的研究成果和学习笔记。
该论文提出了一种形式化的建模方法,用于识别危险状态并制定危害缓解策略。考虑驾驶员、车辆和道路环境的交互,制定达到最安全情况的策略。
定义:状态空间包含很多状态变量,如下表示:、

dom(s)包含s所在区域,可以是车/驾驶员/环境
首先对运行时危险缓解策略进行建模:

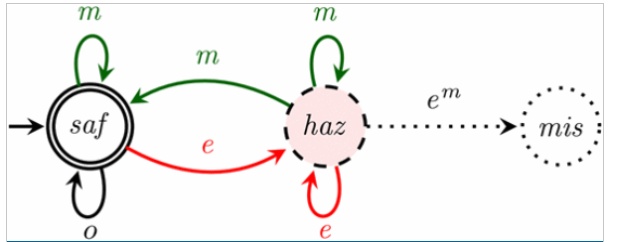
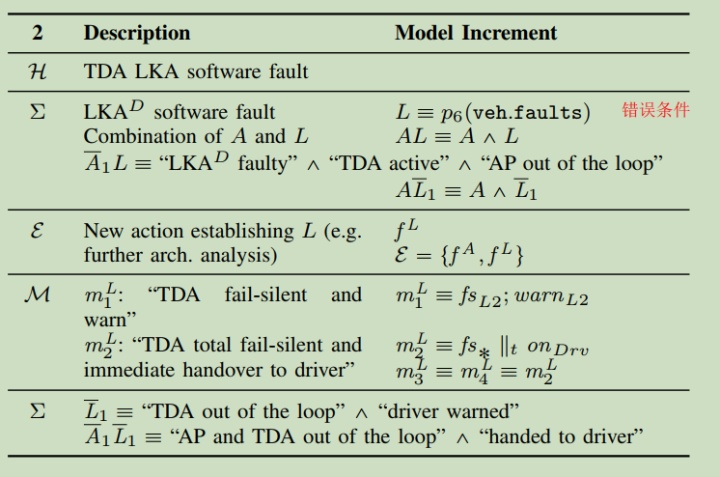
危害h各个阶段的模型
用一个布尔函数值模型来描述驾驶状态,其中pi为1时表示该项发生且参与到建模中

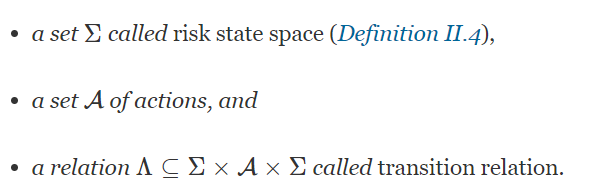
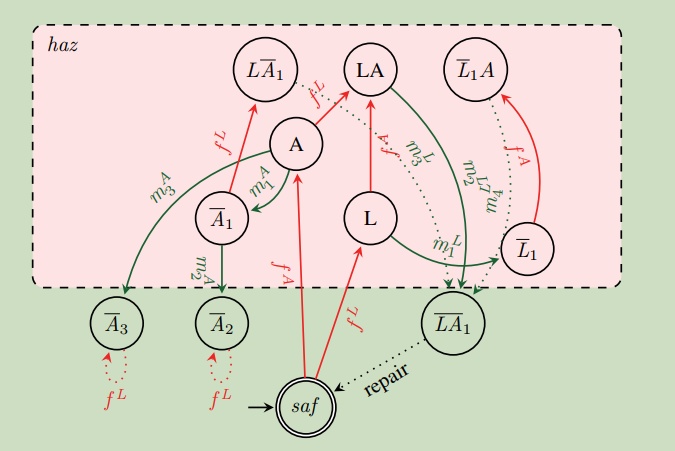
策略分析的风险结构
e:可以是危险,也可以是更复杂危险的一个因素
m:对故障的操作、主动或被动措施、紧急操作
这里的e和m都是属于A的
风险结构
具体场景:一辆自动驾驶车辆正驶离隧道,速度为30-90km/h,驶向的下一段场景是一个十字路口
对于整个状态空间,定义如下变量veh.loc (coor-dinate), veh.speedvec (vector of floats), renv.route (street segment map) drv.pos (enumeration).
然后为场景指定predicate:
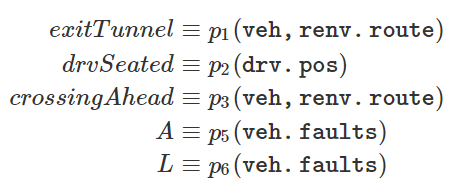
下面的两个表分别代指了两种不同的危险事件A和L:

作者提出的想法:
-
可以对状态空间进行简化
-
为状态和转换加权
-
探索一种自动构建策略的方法
-
扩展为一次缓解多个集合在一起风险的可行策略
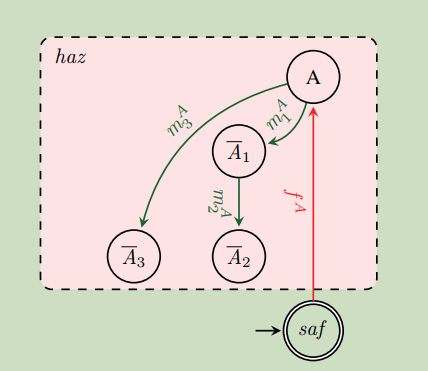
收获:虽然没有具体危害缓解策略的讲解和验证,但前面的定义方法和每个表对应的状态转移图都很有参考意义



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
