




 广告
广告





















































4D毫米波雷达真的来了吗?
2021-11-04 10:35:11· 来源:赛博汽车 作者:肖莹 Andy

4D毫米波雷达落地,还要充分考虑工程化难度,以及成本问题。作者 | 肖莹随着市场对自动驾驶能力需求的不断升级,更高感知能力的传感器,正成为车企们追求的方向
4D毫米波雷达落地,还要充分考虑工程化难度,以及成本问题。
作者 | 肖莹
随着市场对自动驾驶能力需求的不断升级,更高感知能力的传感器,正成为车企们追求的方向。2021年来看,激光雷达和4D毫米波雷达被寄予厚望,两者似乎已经成为下一代传感器套件中必不可少的配置。
今天我们来重点谈一谈4D毫米波雷达。截至目前,有哪些企业布局了4D毫米波雷达?相比传统雷达,4D毫米波雷达有哪些技术优势?以及4D毫米波雷达的落地难度如何?
01、巨头纷纷完成布局
我们先来看一看巨头们布局4D毫米波雷达的时间线。
最早的4D毫米波雷达是在2019年由以色列公司Arbe推出的 Phoenix。今年3月,Arbe宣布已经与超过26家车企、一级供应商建立合作。
2020年初,Waymo宣布在第五代自动驾驶感知套件中推出4D成像雷达。
在2020年9月开幕的北京车展上,华为展示4D毫米波雷达。
2020年底,大陆集团宣布2021年其首个4D毫米波雷达量产解决方案,并表示宝马将成为首家量产搭载汽车制造商。

2021年1月,麦格纳和Fisker宣布,双方合作的纯电动SUV Ocean预计将于2022年底推出,在Ocean上搭载的ADAS系统将使用4D毫米波雷达技术,这款雷达由初创公司Uhnder负责开发。
2021年1月,安波福宣布推出下一代L1至L3 ADAS平台,并表示在传感器套件中,采用了毫米波雷达、摄像头和激光雷达的融合感知方案,其中就包含了安波福的首款4D毫米波雷达。
2021年1月,海拉宣布与创新公司傲酷雷达达成战略伙伴关系,海拉还在前一年底对其进行了战略投资。海拉表示,将整合傲酷开发的4D毫米波雷达软件方案,为车企提供4D毫米波雷达。
2021年4月,随着上汽R汽车ES33车型亮相,采埃孚也曝光了其4D毫米波雷达的前装量产搭载。最新消息显示,目前,这款产品已经进入最后的的验证测试阶段,采埃孚将于2022年向上汽集团提供。
2021年9月,Mobileye宣布将进一步强化在L4自动驾驶领域的前瞻性布局,推出了面向不同等级自动驾驶的硬件架构方案,同时自主研发部署下一代传感器,其中就包括了激光雷达和4D毫米波雷达。Mobileye正在母公司英特尔的帮助下开发多虚拟通道4D毫米波雷达,计划于2025年量产。
2021年10月,博世在上海举办博世汽车与智能交通技术创新体验日,首次展出了博世第五代毫米波雷达至尊版,即4D毫米波像雷达。

博世第五代毫米波雷达至尊版
至此,或通过自研方式,或通过与创新公司战略合作,全球一线毫米波雷达供应商已经完成4D毫米波雷达的亮相。
总体来看,4D毫米波雷达的落地时间点在2021年、2022年左右。
国产毫米波雷达创新企业正在快速成长,但整体还处于跟随状态,在4D毫米波雷达技术上亦是如此。
在国产供应商中,华为布局较快,基本与跨国公司的量产时间在同一节奏上。
除此之外,楚航科技、华域汽车、纳瓦电子、森思泰克、木牛科技、几何伙伴等国产化玩家也纷纷表示开始布局4D毫米波雷达,但具体的量产时间尚未公布。
02、综合性价比优势明显
4D毫米波雷达是传统雷达创新突破的方向。
它继承了传统雷达的优点,比如在任何天气和环境条件下都能正常工作,包括雪雾、大雨等恶劣天气。
与此同时,4D毫米波雷达增加了俯仰角信息,能够形成点云图像。这意味着,其不仅可以检测到物体的距离、相对速度和方位角,还可以检测到前方物体的垂直高度以及前方静止和横向移动物体,这将补足传统雷达对静态目标的检测短板。
从价格来看,4D毫米波雷达也更具优势,根据Arbe透露的信息,其4D毫米波雷达的价格在100-150美元之间,也就是千元以下级别。
对比目前激光雷达价格,最便宜的也要数千元,高线数的激光雷达甚至要达到10万元的级别。
Arbe 4D毫米波雷达产品——Phoenix
综合来看,面向价格敏感的乘用车市场,4D毫米波雷达是更适合量产落地的传感器。
但需要注意的是,从分辨率来看,4D毫米波雷达暂时还无法达到激光雷达和视觉感知这个级别。目前,4D毫米波雷的水平角分辨率多为1°,而激光雷达的水平角分辨率可达到0.1°。
因此,行业普遍成为,摄像头、毫米波雷达和激光雷达是互补的关系,尤其是在更高阶的自动驾驶中,融合感知才是主流技术路线。
目前,4D成像雷达主要有几种技术方案,一种是基于传统雷达芯片供应商的解决方案,通过多芯片极联,或者软件算法来实现密集点云输出及识别。
另一种方案,企业自主研发多通道阵列射频芯片组、雷达处理器芯片和基于人工智能的后处理软件算法。
目前来看,博世、Arbe、Vayaar、Unhder、Mobileye等公司都采取的是定制芯片模式,相比第一种方式,前期的研发成本更高,技术门槛也更高,但方案也更灵活。
定制化方案可以根据客户不同需求,采用模块化设计,允许主机厂自由设置分辨率、范围、视野和功能,从而适配不同的功能设计和成本要求。
傲酷选择的技术路径是通过软件和算法来提升雷达性能。傲酷表示,其虚拟孔径成像软件平台使用AI算法可以将任何雷达硬件的角分辨率和灵敏度提升最高达百倍的性能。
目前来看,哪种路线更可靠、更具可落地性还没有最终答案,毕竟4D毫米波雷达刚刚进入到市场检验阶段。我们也非常期待,通过技术落地,来看哪种产品更具技术优势。
03、具体场景具体分析
虽然都将4D毫米波雷达作为一个方向来看,但其落地还有很长的路要走。
在近期举办的中德汽车论坛上,楚航科技首席技术官张我弓围绕4D毫米波雷达落地,进行了一场深度分享。
他认为,对于雷达公司来讲,现在的起步做4D毫米波雷达正是时机,但是其真正落地可能没有那么快。
4D毫米波雷达作为车规级安全件,开发周期非常长,要有足够的时间来完成系统设计、测试验证等环节。通常来讲,开发一款雷达要5年的时间,如果是走定制芯片的路线,可能会需要更多的时间。
图片来源:楚航科技
张我弓介绍,4D毫米波雷达主要特征是拥有海量有效点迹,但在车载应用中,必须要有工程化落地的实际考量。
4D毫米波雷达相比3D雷达增加了一个空间维度的探测指标,这将带来很多额外的工程考量和落地思考。如何把它能用起来,工程问题需要一个个解答。
例如,车载高实时性必须保证;更多射频前端通道,同时要求体积不能太大;强数据存储能力、强信号处理能力、强信号传输能力,以及更多的有效点迹筛选算法;更严格的供应商质量管控;更长的校准时间,且要兼顾符合成本管控的生产良率等。
他认为,最终要考虑的是,产品的售价能否对冲以上研发生产各环节的成本增加,以及客户是否愿意为此买单。
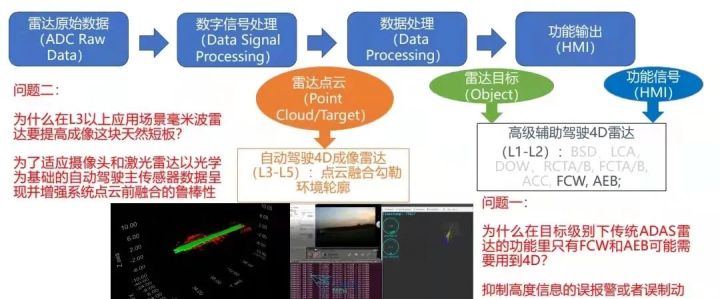
因此,他进一步谈到,根据需求设计雷达非常重要,在传统ADAS功能里,只有前碰撞预警系统(FCW)和自动紧急制动系统(AEB)需要用到4D点云数据,因为要防止抑制高度信息的误报警或误制动。
但是,并不是所有功能或者场景都需要俯仰信息,例如大部分针对目标级别的ADAS功能和交通雷达场景,加一个摄像头,或许会也比4D毫米波雷达效果更优。
在L3以上应用场景,毫米波雷达要实现4D成像,是为了适应摄像头和激光雷达主传感器的数据呈现,并增强系统点云前融合的鲁棒性。
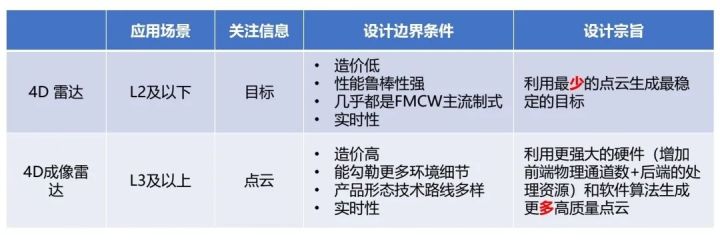
他认为,L2方案设计的原则是要利用最少的点云生成最稳定的目标,L3及以上方案设计的原则是利用更强大的硬件(增加前端物理通道数+后端的处理资源)和软件算法生成更多高质量点云。
谈及4D雷达和激光雷达的关系,张我弓认为,一方面,4D毫米波雷达和激光雷达在性能和成本上形成角力,另一方面,双方在探测指标和失效模式上又能形成互补。至于哪种雷达更具优势,还需要具体场景具体分析。
综上,4D毫米波雷达落地,要充分考虑工程化难度,以及成本问题。布局4D毫米波雷达现在正是时机,但是对落地的期待不要太高,短期来看,4D毫米波雷达落地更趋向于示范性的测试验证,大规模落地还需要一定时间。
- 下一篇:智慧交通中的数字孪生应用
- 上一篇:线控转向系统的自适应神经网络滑模控制



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
