




 广告
广告





















































FAST-LIO2: 快速直接的激光雷达-惯性里程计
2021-09-12 21:53:49· 来源:同济智能汽车研究所

k表示激光雷达扫描的索引,
j=1,... ,m} 表示在扫描结束时间时,在局部激光雷达坐标系L中第k次扫描采到的点。由于激光雷达测量噪声,每个测量点通常都会受到由测距和波束定向噪声组成的噪声

的污染。去除此噪声可得到在局部激光雷达坐标系中的真实点位置


在使用相应的激光雷达姿态
和外参
将真实点投影到全局坐标系之后,这个真实点应该正好位于地图中的一个局部小平面块上,即:

其中

是对应平面的法向量,

是平面上的一个点(见图2)。需要注意的是,

和
都包含在状态向量xk中。因此,第 j个点测量值
所贡献的测量值可以从(4)总结为更紧凑的形式,如下所示
这定义了状态向量的隐式测量模型.
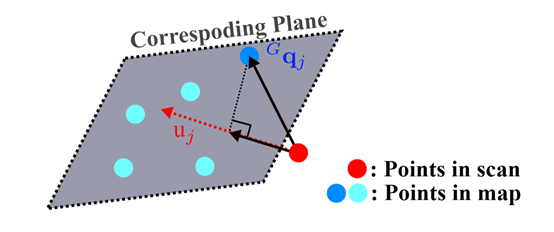
图2 测量模型
B.迭代卡尔曼滤波
基于在流形

上制定的状态模型(2)和测量模型(5),我们采用迭代卡尔曼滤波器,按照[55]和[22]中的过程直接在流形M上操作。它由两个关键步骤组成:每此IMU测量值的传播和每此激光雷达扫描的迭代更新,这两个步骤都自然地估计流形上的状态,从而避免任何重整化。由于IMU测量的频率通常高于激光雷达扫描的频率(例如,IMU测量为200Hz,激光雷达扫描为10Hz~100Hz),因此滤波器在更新之前通常会执行多个传播步骤。
1)传播:假设在融合最后一次(即第k-1次)激光雷达扫描后的最佳状态估计是为
,协方差矩阵为

。前向传播是在IMU测量值到达时执行的。更具体地说,通过将过程噪声wi设置为零,状态和协方差按照(2)进行传播:

其中Qi是噪声wi的协方差,矩阵
和

的计算如下(参见[55]中更抽象的推导和[22]中更具体的推导):

前向传播一直持续到新的(即第k次)扫描结束,新扫描中的传播状态和协方差表示为
。
2)残差计算:假设在当前迭代更新时状态xk的估计值(见第IV-B3节)是

,根据(6)中的传播预测出的状态,当k=0时(即在第一次迭代前),

。然后,我们将每个测量的激光雷达点投影到全局坐标系

,并在由ikd-Tree表示的地图中搜索其最近的5个点(参见第V-A节)。然后使用找到的最近相邻点来拟合局部小平面块,该小平面块具有测量模型中使用的法向量
和质心




 广告
广告 



最新资讯
-
用于赛车运动车辆动力学测量的光学传感器
2026-03-18 21:31
-
联合国法规R86对农林拖拉机灯光安装的工程
2026-03-18 12:20
-
联合国法规R78对L类车辆制动系统的工程化约
2026-03-18 12:16
-
联合国法规R77对机动车驻车灯静态可见性的
2026-03-18 12:16
-
TCT亚洲展启幕!思看科技人气爆棚,这些产
2026-03-17 19:17
